 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaboost with "Keypoint Presence Features" for Real-Time Vehicle Visual Detection
Paper and Code
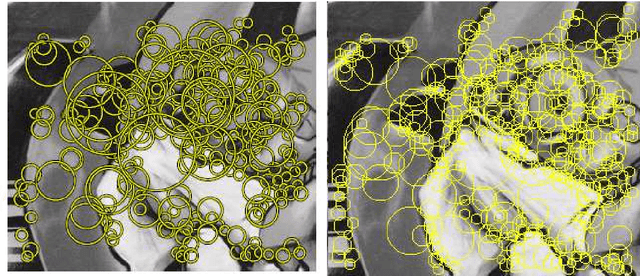
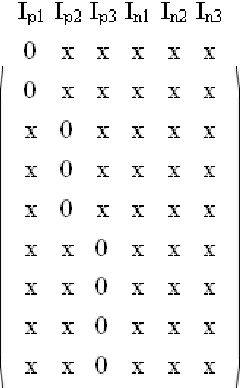
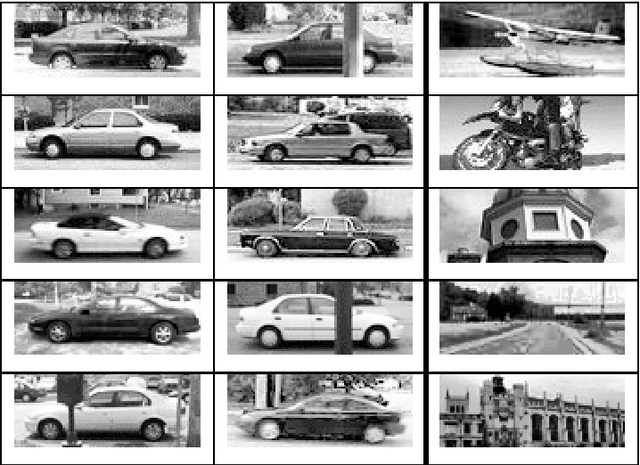
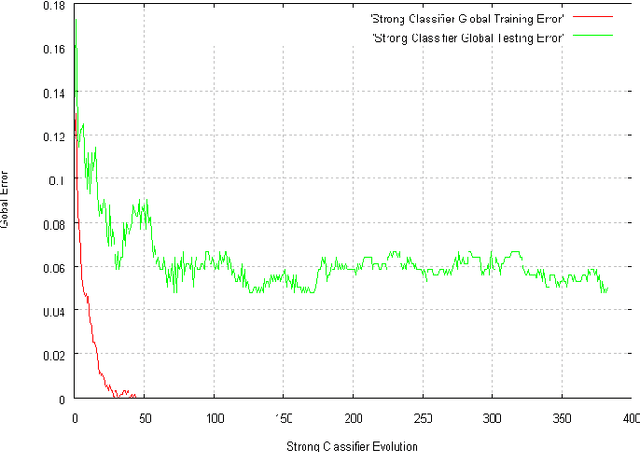
We present promising results for real-time vehicle visual detection, obtained with adaBoost using new original ?keypoints presence features?. These weak-classifiers produce a boolean response based on presence or absence in the tested image of a ?keypoint? (~ a SURF interest point) with a descriptor sufficiently similar (i.e. within a given distance) to a reference descriptor characterizing the feature. A first experiment was conducted on a public image dataset containing lateral-viewed cars, yielding 95% recall with 95% precision on test set. Moreover, analysis of the positions of adaBoost-selected keypoints show that they correspond to a specific part of the object category (such as ?wheel? or ?side skirt?) and thus have a ?semantic? meaning.