 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Model Checking for Closed-Loop Robot Reactive Planning
Aug 26, 2025
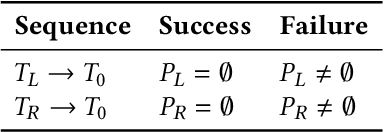


We present a new application of model checking which achieves real-time multi-step planning and obstacle avoidance on a real autonomous robot. We have developed a small, purpose-built model checking algorithm which generates plans in situ based on "core" knowledge and attention as found in biological agents. This is achieved in real-time using no pre-computed data on a low-powered device. Our approach is based on chaining temporary control systems which are spawned to counteract disturbances in the local environment that disrupt an autonomous agent from its preferred action (or resting state). A novel discretization of 2D LiDAR data sensitive to bounded variations in the local environment is used. Multi-step planning using model checking by forward depth-first search is applied to cul-de-sac and playground scenarios. Both empirical results and informal proofs of two fundamental properties of our approach demonstrate that model checking can be used to create efficient multi-step plans for local obstacle avoidance, improving on the performance of a reactive agent which can only plan one step. Our approach is an instructional case study for the development of safe, reliable and explainable planning in the context of autonomous vehicles.
Closed-loop multi-step planning with innate physics knowledge
Nov 18, 2024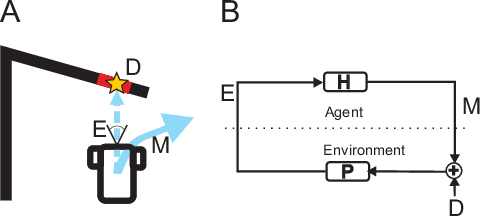
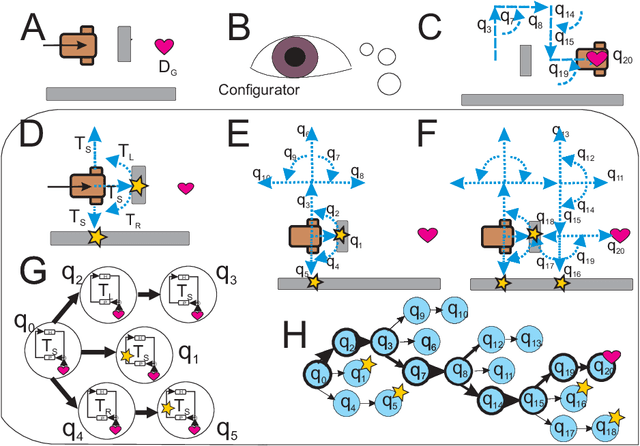
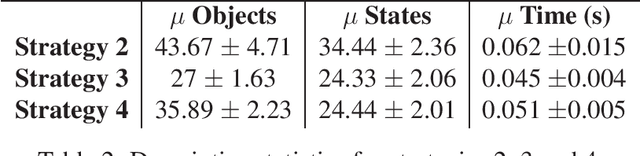
We present a hierarchical framework to solve robot planning as an input control problem. At the lowest level are temporary closed control loops, ("tasks"), each representing a behaviour, contingent on a specific sensory input and therefore temporary. At the highest level, a supervising "Configurator" directs task creation and termination. Here resides "core" knowledge as a physics engine, where sequences of tasks can be simulated. The Configurator encodes and interprets simulation results,based on which it can choose a sequence of tasks as a plan. We implement this framework on a real robot and test it in an overtaking scenario as proof-of-concept.
Homeostatic motion planning with innate physics knowledge
Feb 23, 2024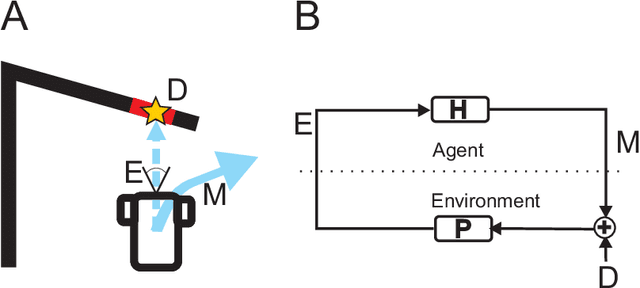
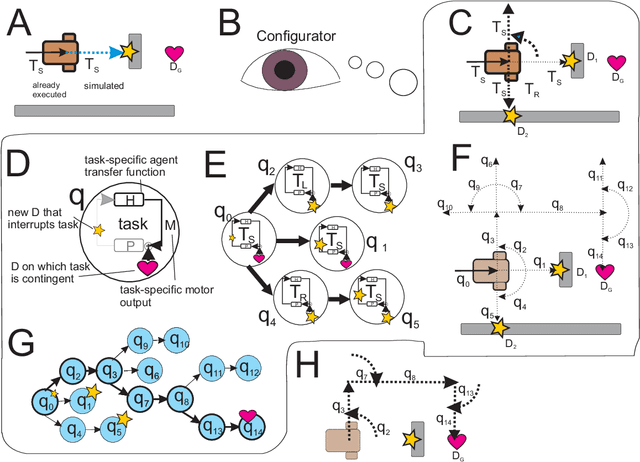
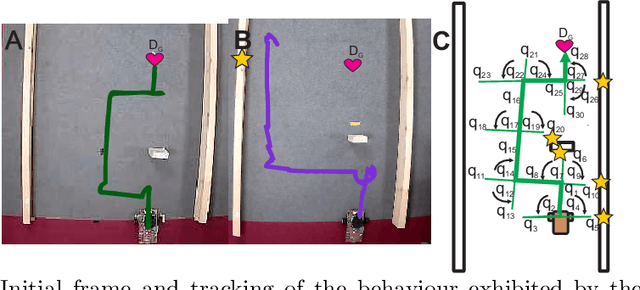
Living organisms interact with their surroundings in a closed-loop fashion, where sensory inputs dictate the initiation and termination of behaviours. Even simple animals are able to develop and execute complex plans, which has not yet been replicated in robotics using pure closed-loop input control. We propose a solution to this problem by defining a set of discrete and temporary closed-loop controllers, called "tasks", each representing a closed-loop behaviour. We further introduce a supervisory module which has an innate understanding of physics and causality, through which it can simulate the execution of task sequences over time and store the results in a model of the environment. On the basis of this model, plans can be made by chaining temporary closed-loop controllers. The proposed framework was implemented for a real robot and tested in two scenarios as proof of concept.
Model Checking for Closed-Loop Robot Reactive Planning
Nov 16, 2023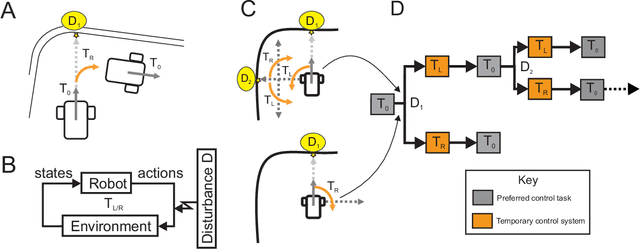
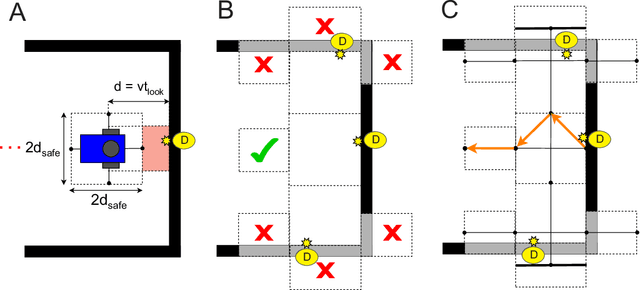
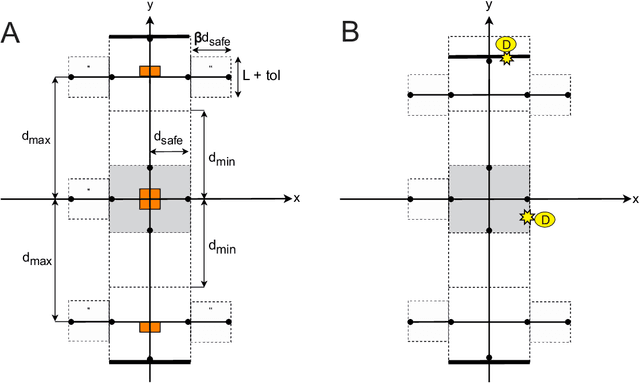
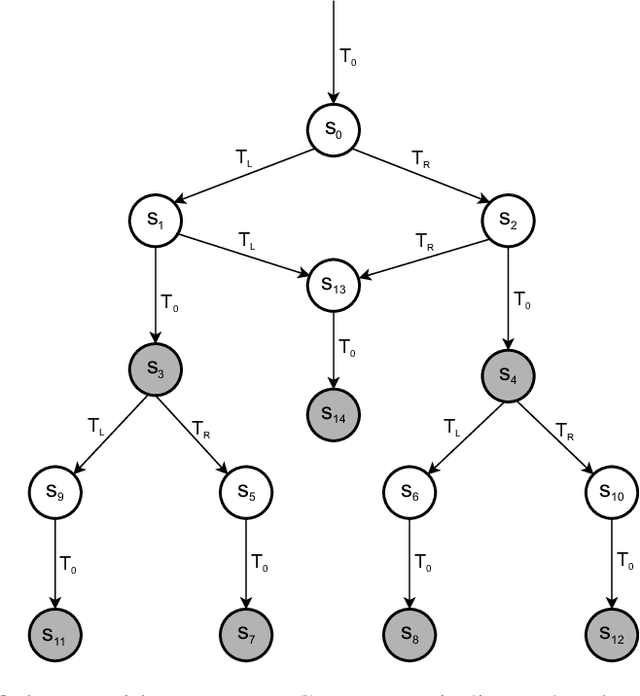
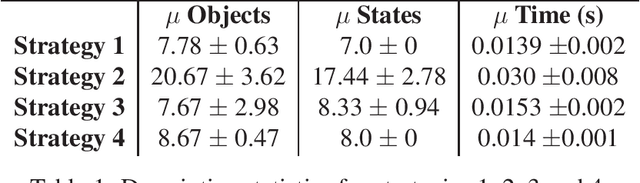
In this paper, we show how model checking can be used to create multi-step plans for a differential drive wheeled robot so that it can avoid immediate danger. Using a small, purpose built model checking algorithm in situ we generate plans in real-time in a way that reflects the egocentric reactive response of simple biological agents. Our approach is based on chaining temporary control systems which are spawned to eliminate disturbances in the local environment that disrupt an autonomous agent from its preferred action (or resting state). The method involves a novel discretization of 2D LiDAR data which is sensitive to bounded stochastic variations in the immediate environment. We operationalise multi-step planning using invariant checking by forward depth-first search, using a cul-de-sac scenario as a first test case. Our results demonstrate that model checking can be used to plan efficient trajectories for local obstacle avoidance, improving on the performance of a reactive agent which can only plan one step. We achieve this in near real-time using no pre-computed data. While our method has limitations, we believe our approach shows promise as an avenue for the development of safe, reliable and transparent trajectory planning in the context of autonomous vehicles.
* In Proceedings FMAS 2023, arXiv:2311.08987
Simulation and Model Checking for Close to Realtime Overtaking Planning
Oct 25, 2021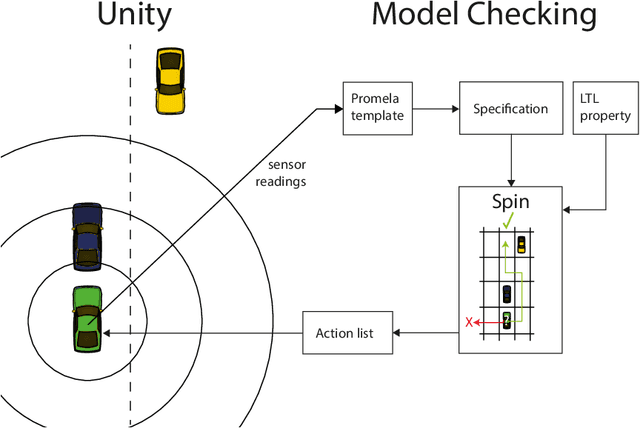
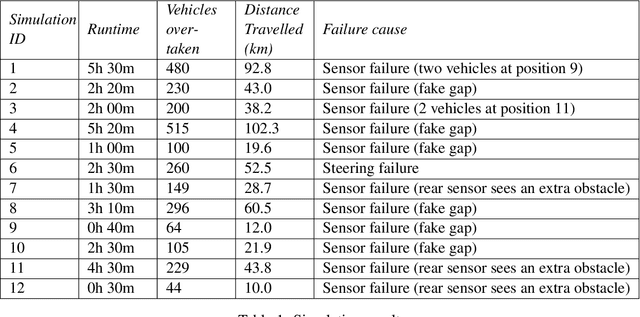
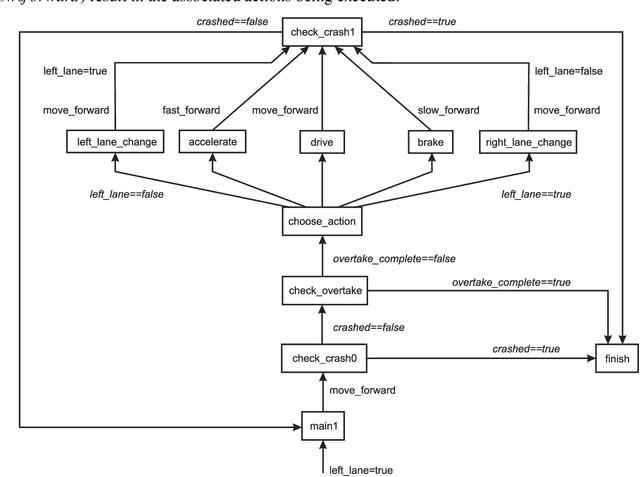
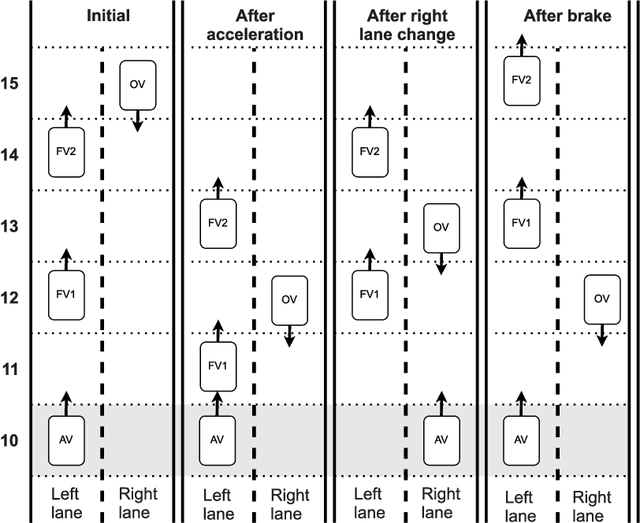
Fast and reliable trajectory planning is a key requirement of autonomous vehicles. In this paper we introduce a novel technique for planning the route of an autonomous vehicle on a straight rural road using the Spin model checker. We show how we can combine Spins ability to identify paths violating temporal properties with sensor information from a 3D Unity simulation of an autonomous vehicle, to plan and perform consecutive overtaking manoeuvres on a traffic heavy road. This involves discretising the sensory information and combining multiple sequential Spin models with a Linear Time Temporal Logic specification to generate an error path. This path provides the autonomous vehicle with an action plan. The entire process takes place in close to realtime using no precomputed data and the action plan is specifically tailored for individual scenarios. Our experiments demonstrate that the simulated autonomous vehicle implementing our approach can drive on average at least 40km and overtake 214 vehicles before experiencing a collision, which is usually caused by inaccuracies in the sensory system. While the proposed system has some drawbacks, we believe that our novel approach demonstrates a potentially powerful future tool for efficient trajectory planning for autonomous vehicles.
* In Proceedings FMAS 2021, arXiv:2110.11527
A Continuous-Time Model of an Autonomous Aerial Vehicle to Inform and Validate Formal Verification Methods
Sep 01, 2016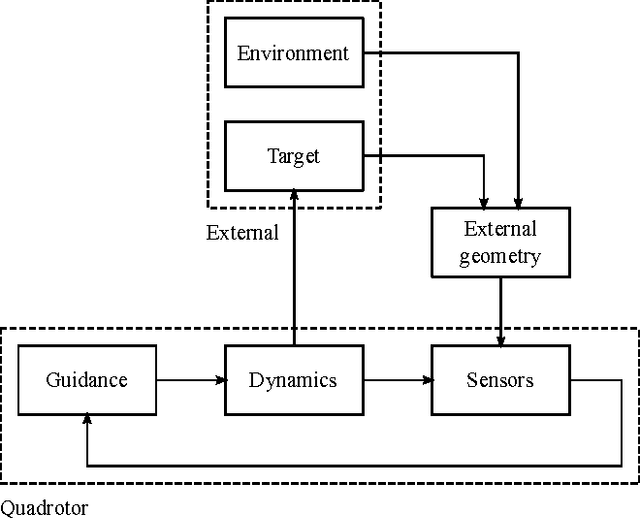
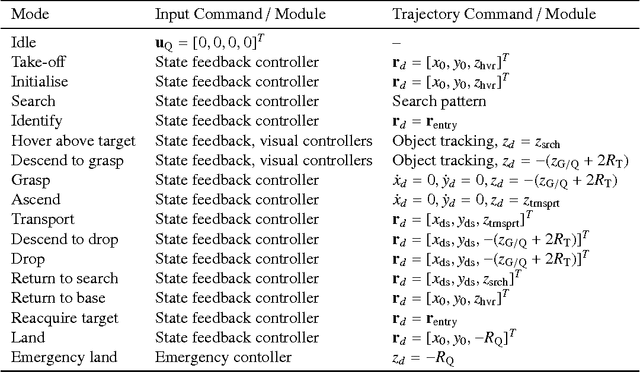
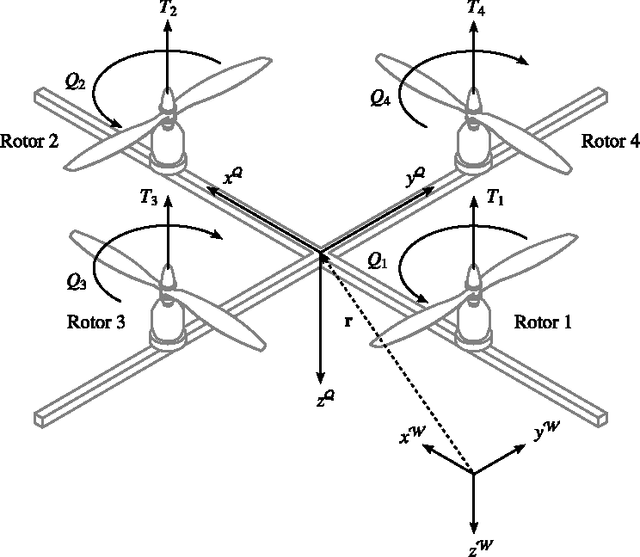
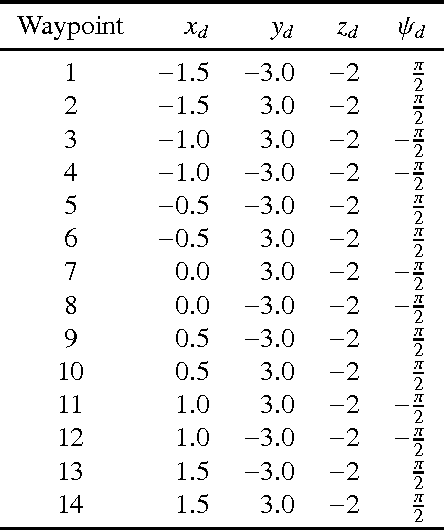
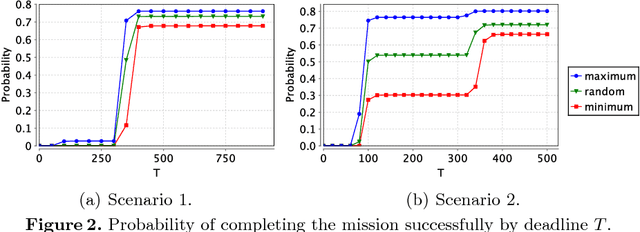
If autonomous vehicles are to be widely accepted, we need to ensure their safe operation. For this reason, verification and validation (V&V) approaches must be developed that are suitable for this domain. Model checking is a formal technique which allows us to exhaustively explore the paths of an abstract model of a system. Using a probabilistic model checker such as PRISM, we may determine properties such as the expected time for a mission, or the probability that a specific mission failure occurs. However, model checking of complex systems is difficult due to the loss of information during abstraction. This is especially so when considering systems such as autonomous vehicles which are subject to external influences. An alternative solution is the use of Monte Carlo simulation to explore the results of a continuous-time model of the system. The main disadvantage of this approach is that the approach is not exhaustive as not all executions of the system are analysed. We are therefore interested in developing a framework for formal verification of autonomous vehicles, using Monte Carlo simulation to inform and validate our symbolic models during the initial stages of development. In this paper, we present a continuous-time model of a quadrotor unmanned aircraft undertaking an autonomous mission. We employ this model in Monte Carlo simulation to obtain specific mission properties which will inform the symbolic models employed in formal verification.
Autonomous Agent Behaviour Modelled in PRISM -- A Case Study
Feb 22, 2016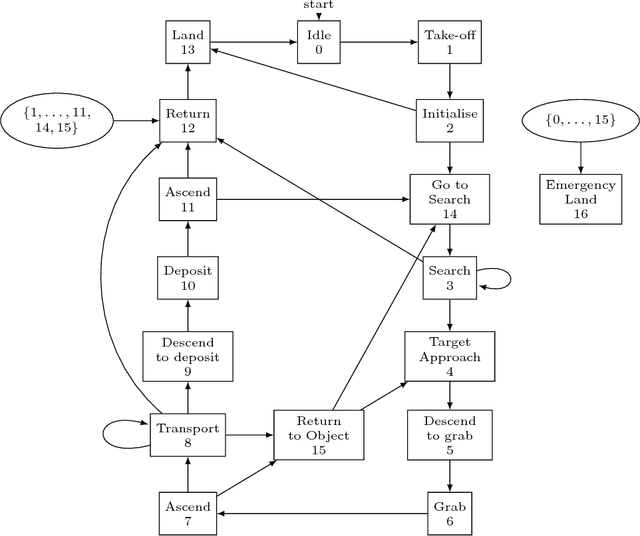
Formal verification of agents representing robot behaviour is a growing area due to the demand that autonomous systems have to be proven safe. In this paper we present an abstract definition of autonomy which can be used to model autonomous scenarios and propose the use of small-scale simulation models representing abstract actions to infer quantitative data. To demonstrate the applicability of the approach we build and verify a model of an unmanned aerial vehicle (UAV) in an exemplary autonomous scenario, utilising this approach.
Computing the Ramsey Number R(4,3,3) using Abstraction and Symmetry breaking
Nov 01, 2015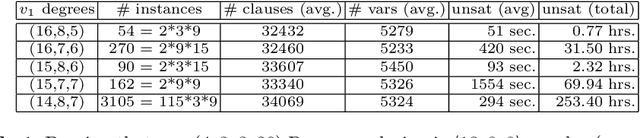
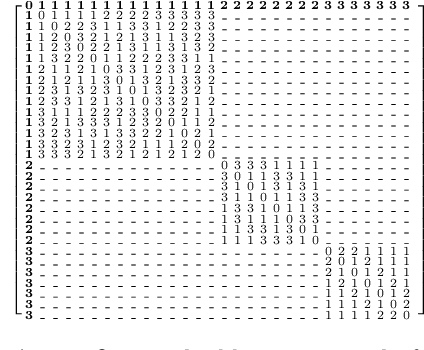
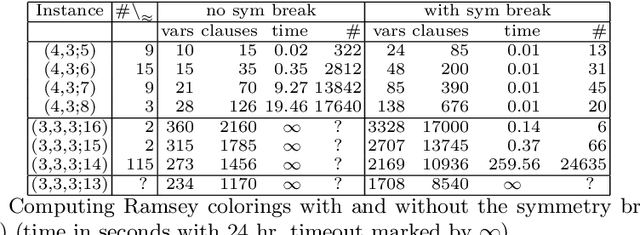
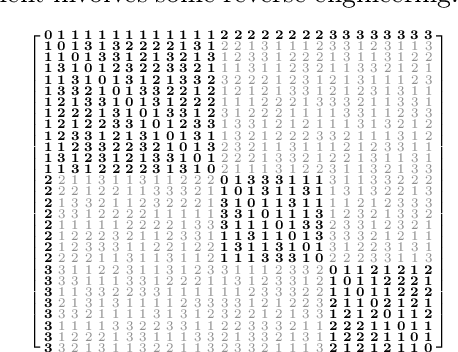
The number $R(4,3,3)$ is often presented as the unknown Ramsey number with the best chances of being found "soon". Yet, its precise value has remained unknown for almost 50 years. This paper presents a methodology based on \emph{abstraction} and \emph{symmetry breaking} that applies to solve hard graph edge-coloring problems. The utility of this methodology is demonstrated by using it to compute the value $R(4,3,3)=30$. Along the way it is required to first compute the previously unknown set ${\cal R}(3,3,3;13)$ consisting of 78{,}892 Ramsey colorings.
Solving Graph Coloring Problems with Abstraction and Symmetry
Mar 26, 2015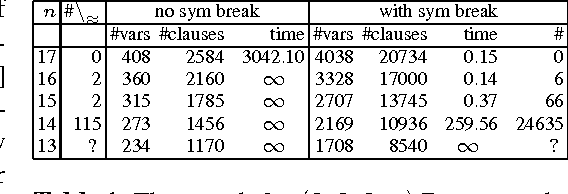
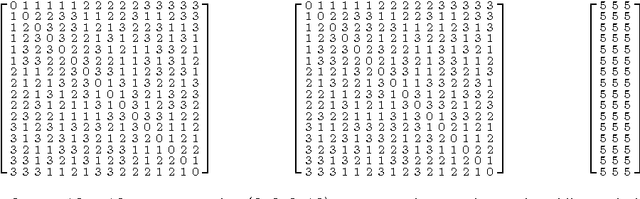
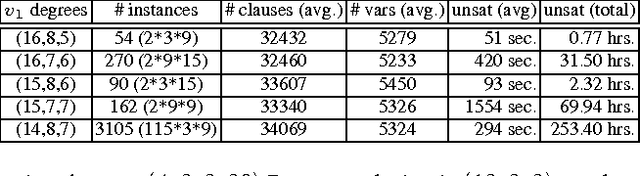
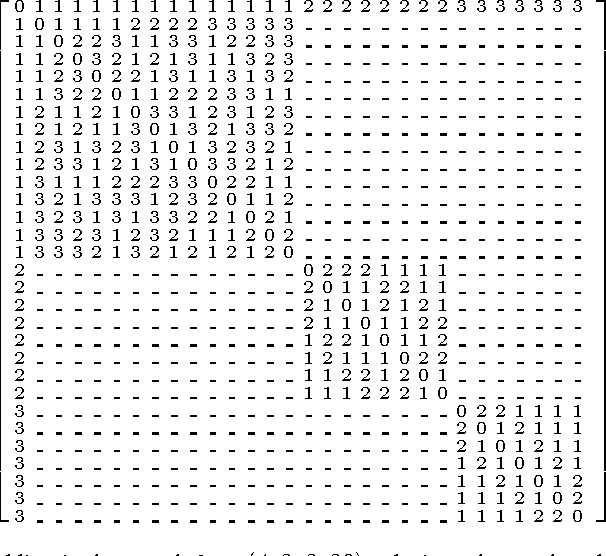
This paper introduces a general methodology, based on abstraction and symmetry, that applies to solve hard graph edge-coloring problems and demonstrates its use to provide further evidence that the Ramsey number $R(4,3,3)=30$. The number $R(4,3,3)$ is often presented as the unknown Ramsey number with the best chances of being found "soon". Yet, its precise value has remained unknown for more than 50 years. We illustrate our approach by showing that: (1) there are precisely 78{,}892 $(3,3,3;13)$ Ramsey colorings; and (2) if there exists a $(4,3,3;30)$ Ramsey coloring then it is (13,8,8) regular. Specifically each node has 13 edges in the first color, 8 in the second, and 8 in the third. We conjecture that these two results will help provide a proof that no $(4,3,3;30)$ Ramsey coloring exists implying that $R(4,3,3)=30$.