Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Agent Behaviour Modelled in PRISM -- A Case Study
Paper and Code
Feb 22, 2016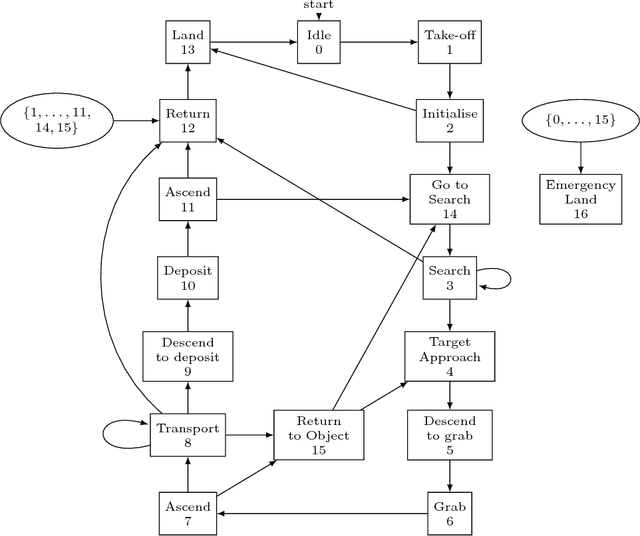
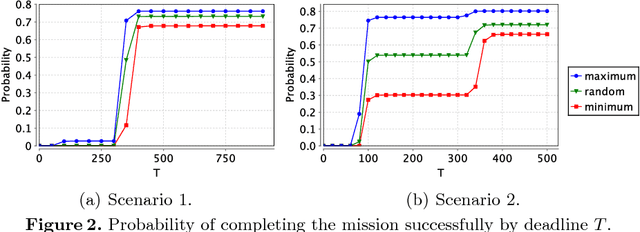
Formal verification of agents representing robot behaviour is a growing area due to the demand that autonomous systems have to be proven safe. In this paper we present an abstract definition of autonomy which can be used to model autonomous scenarios and propose the use of small-scale simulation models representing abstract actions to infer quantitative data. To demonstrate the applicability of the approach we build and verify a model of an unmanned aerial vehicle (UAV) in an exemplary autonomous scenario, utilising this approach.
View paper on