 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Automatic Design of Factorio Blueprints
Oct 02, 2023Factorio is a 2D construction and management simulation video game about building automated factories to produce items of increasing complexity. A core feature of the game is its blueprint system, which allows players to easily save and replicate parts of their designs. Blueprints can reproduce any layout of objects in the game, but are typically used to encapsulate a complex behaviour, such as the production of a non-basic object. Once created, these blueprints are then used as basic building blocks, allowing the player to create a layer of abstraction. The usage of blueprints not only eases the expansion of the factory but also allows the sharing of designs with the game's community. The layout in a blueprint can be optimised using various criteria, such as the total space used or the final production throughput. The design of an optimal blueprint is a hard combinatorial problem, interleaving elements of many well-studied problems such as bin-packing, routing or network design. This work presents a new challenging problem and explores the feasibility of a constraint model to optimise Factorio blueprints, balancing correctness, optimality, and performance.
Using Small MUSes to Explain How to Solve Pen and Paper Puzzles
Apr 30, 2021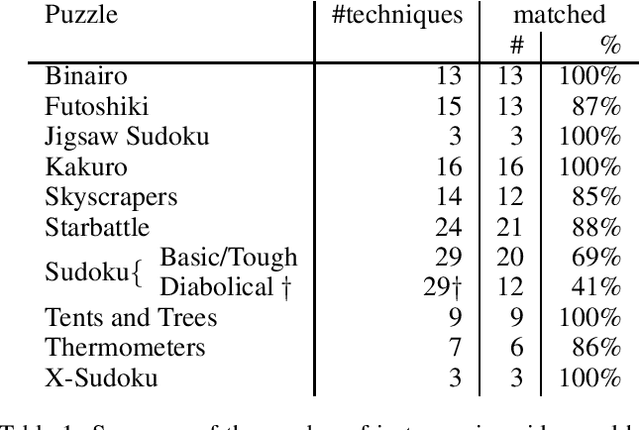
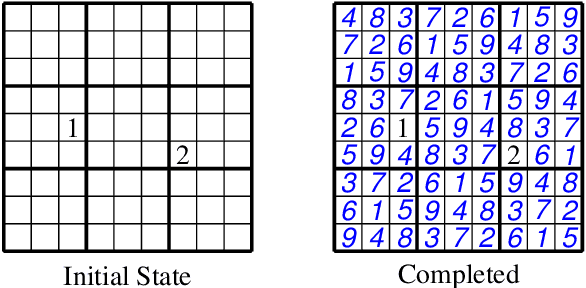
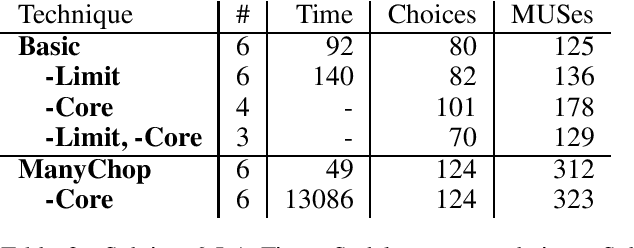
Pen and paper puzzles like Sudoku, Futoshiki and Skyscrapers are hugely popular. Solving such puzzles can be a trivial task for modern AI systems. However, most AI systems solve problems using a form of backtracking, while people try to avoid backtracking as much as possible. This means that existing AI systems do not output explanations about their reasoning that are meaningful to people. We present Demystify, a tool which allows puzzles to be expressed in a high-level constraint programming language and uses MUSes to allow us to produce descriptions of steps in the puzzle solving. We give several improvements to the existing techniques for solving puzzles with MUSes, which allow us to solve a range of significantly more complex puzzles and give higher quality explanations. We demonstrate the effectiveness and generality of Demystify by comparing its results to documented strategies for solving a range of pen and paper puzzles by hand, showing that our technique can find many of the same explanations.
A Continuous-Time Model of an Autonomous Aerial Vehicle to Inform and Validate Formal Verification Methods
Sep 01, 2016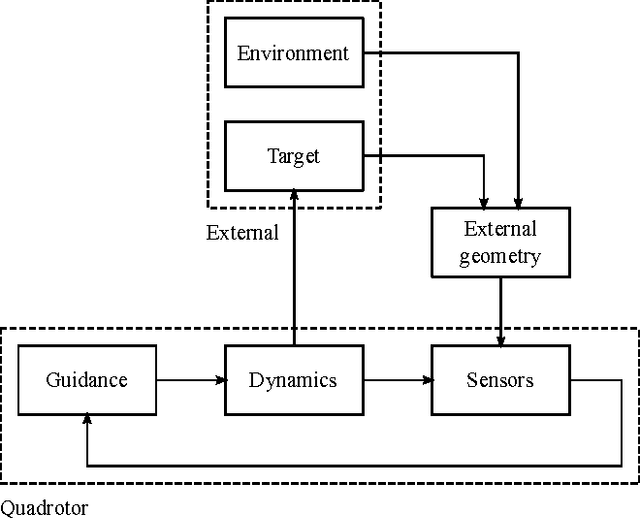
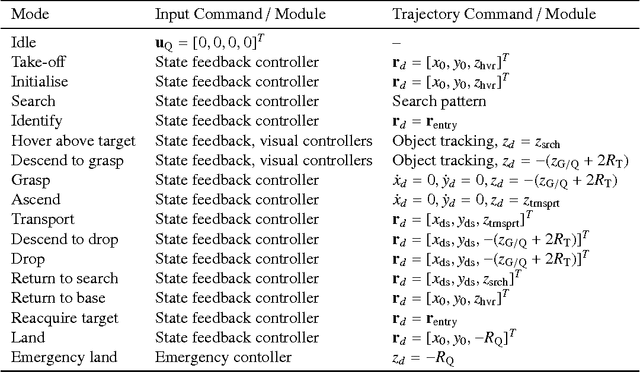
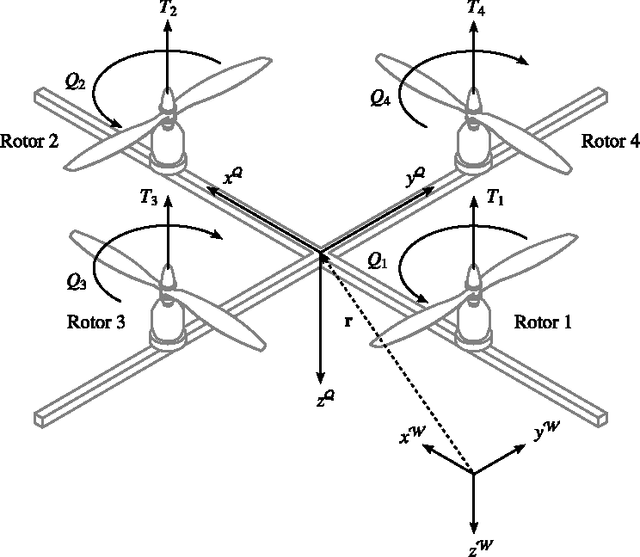
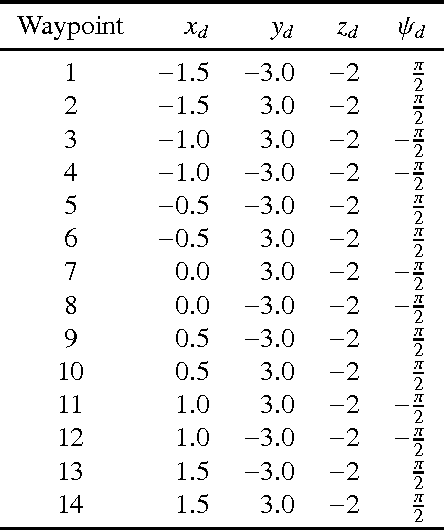
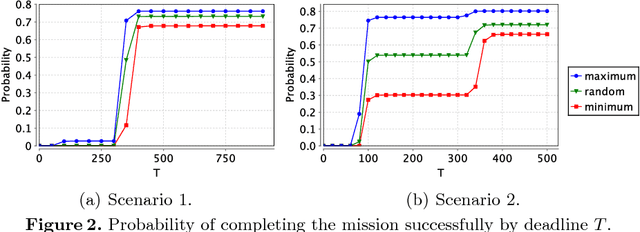
If autonomous vehicles are to be widely accepted, we need to ensure their safe operation. For this reason, verification and validation (V&V) approaches must be developed that are suitable for this domain. Model checking is a formal technique which allows us to exhaustively explore the paths of an abstract model of a system. Using a probabilistic model checker such as PRISM, we may determine properties such as the expected time for a mission, or the probability that a specific mission failure occurs. However, model checking of complex systems is difficult due to the loss of information during abstraction. This is especially so when considering systems such as autonomous vehicles which are subject to external influences. An alternative solution is the use of Monte Carlo simulation to explore the results of a continuous-time model of the system. The main disadvantage of this approach is that the approach is not exhaustive as not all executions of the system are analysed. We are therefore interested in developing a framework for formal verification of autonomous vehicles, using Monte Carlo simulation to inform and validate our symbolic models during the initial stages of development. In this paper, we present a continuous-time model of a quadrotor unmanned aircraft undertaking an autonomous mission. We employ this model in Monte Carlo simulation to obtain specific mission properties which will inform the symbolic models employed in formal verification.
Autonomous Agent Behaviour Modelled in PRISM -- A Case Study
Feb 22, 2016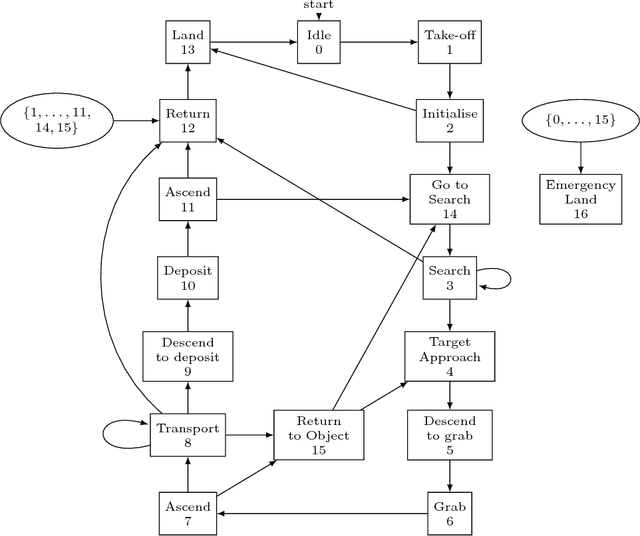
Formal verification of agents representing robot behaviour is a growing area due to the demand that autonomous systems have to be proven safe. In this paper we present an abstract definition of autonomy which can be used to model autonomous scenarios and propose the use of small-scale simulation models representing abstract actions to infer quantitative data. To demonstrate the applicability of the approach we build and verify a model of an unmanned aerial vehicle (UAV) in an exemplary autonomous scenario, utilising this approach.