 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Model Checking for Closed-Loop Robot Reactive Planning
Aug 26, 2025


We present a new application of model checking which achieves real-time multi-step planning and obstacle avoidance on a real autonomous robot. We have developed a small, purpose-built model checking algorithm which generates plans in situ based on "core" knowledge and attention as found in biological agents. This is achieved in real-time using no pre-computed data on a low-powered device. Our approach is based on chaining temporary control systems which are spawned to counteract disturbances in the local environment that disrupt an autonomous agent from its preferred action (or resting state). A novel discretization of 2D LiDAR data sensitive to bounded variations in the local environment is used. Multi-step planning using model checking by forward depth-first search is applied to cul-de-sac and playground scenarios. Both empirical results and informal proofs of two fundamental properties of our approach demonstrate that model checking can be used to create efficient multi-step plans for local obstacle avoidance, improving on the performance of a reactive agent which can only plan one step. Our approach is an instructional case study for the development of safe, reliable and explainable planning in the context of autonomous vehicles.
Closed-loop multi-step planning with innate physics knowledge
Nov 18, 2024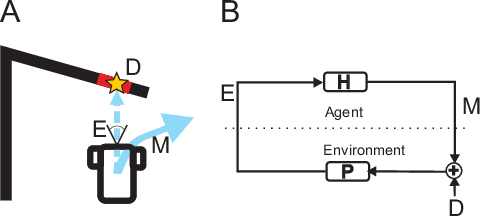
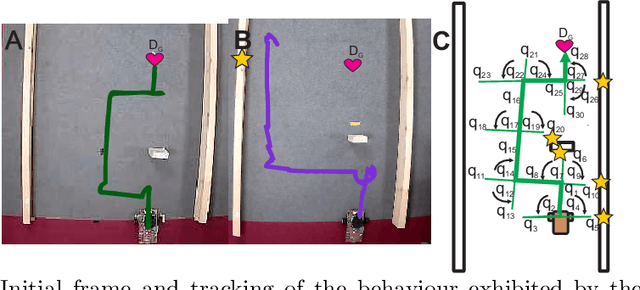
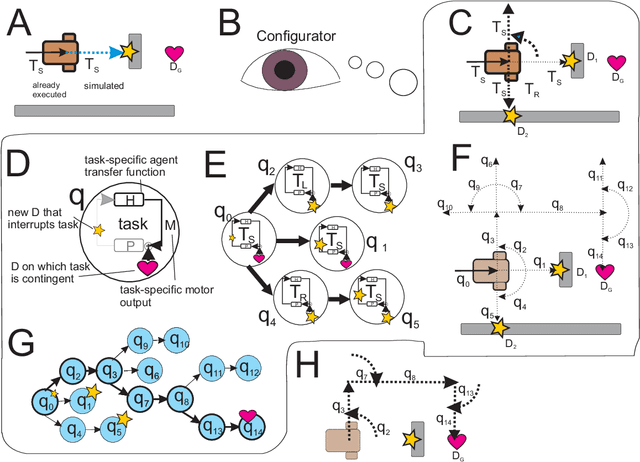
We present a hierarchical framework to solve robot planning as an input control problem. At the lowest level are temporary closed control loops, ("tasks"), each representing a behaviour, contingent on a specific sensory input and therefore temporary. At the highest level, a supervising "Configurator" directs task creation and termination. Here resides "core" knowledge as a physics engine, where sequences of tasks can be simulated. The Configurator encodes and interprets simulation results,based on which it can choose a sequence of tasks as a plan. We implement this framework on a real robot and test it in an overtaking scenario as proof-of-concept.
Homeostatic motion planning with innate physics knowledge
Feb 23, 2024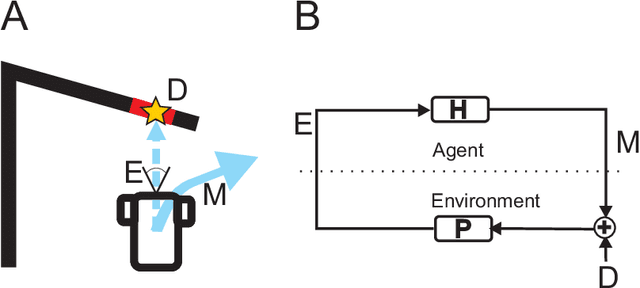
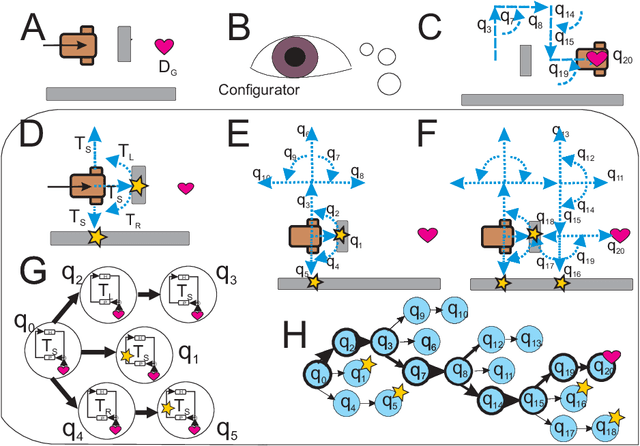
Living organisms interact with their surroundings in a closed-loop fashion, where sensory inputs dictate the initiation and termination of behaviours. Even simple animals are able to develop and execute complex plans, which has not yet been replicated in robotics using pure closed-loop input control. We propose a solution to this problem by defining a set of discrete and temporary closed-loop controllers, called "tasks", each representing a closed-loop behaviour. We further introduce a supervisory module which has an innate understanding of physics and causality, through which it can simulate the execution of task sequences over time and store the results in a model of the environment. On the basis of this model, plans can be made by chaining temporary closed-loop controllers. The proposed framework was implemented for a real robot and tested in two scenarios as proof of concept.
Model Checking for Closed-Loop Robot Reactive Planning
Nov 16, 2023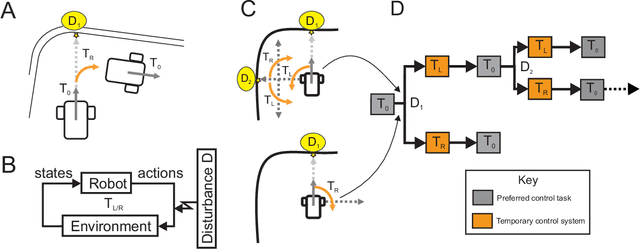
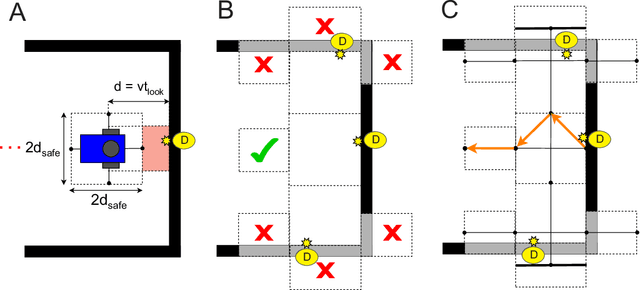
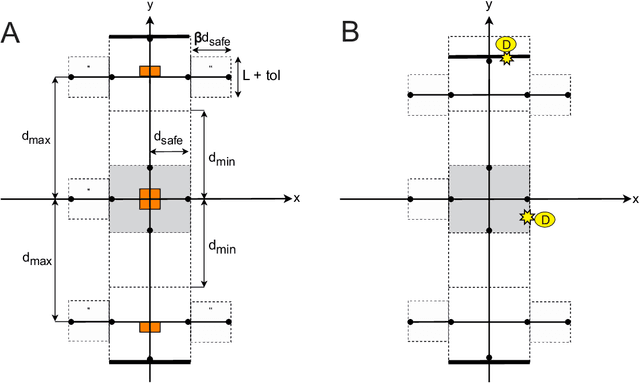
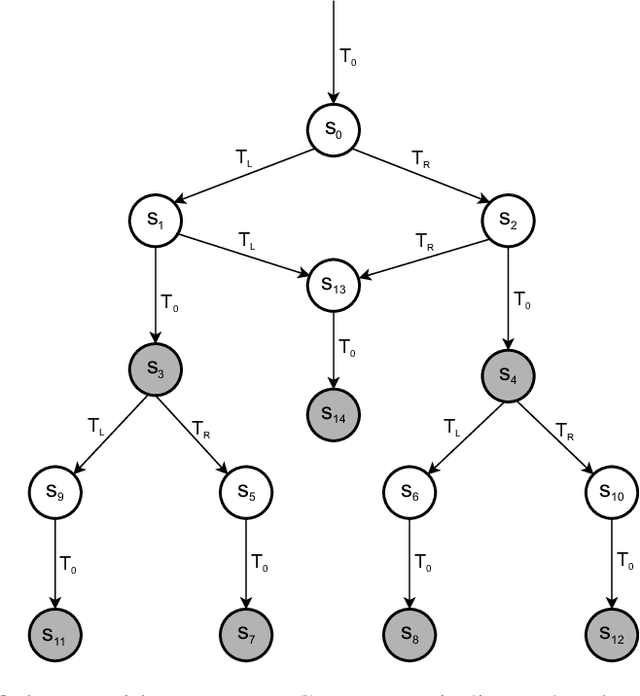
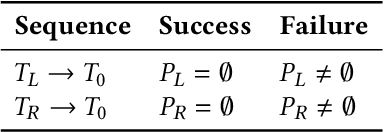
In this paper, we show how model checking can be used to create multi-step plans for a differential drive wheeled robot so that it can avoid immediate danger. Using a small, purpose built model checking algorithm in situ we generate plans in real-time in a way that reflects the egocentric reactive response of simple biological agents. Our approach is based on chaining temporary control systems which are spawned to eliminate disturbances in the local environment that disrupt an autonomous agent from its preferred action (or resting state). The method involves a novel discretization of 2D LiDAR data which is sensitive to bounded stochastic variations in the immediate environment. We operationalise multi-step planning using invariant checking by forward depth-first search, using a cul-de-sac scenario as a first test case. Our results demonstrate that model checking can be used to plan efficient trajectories for local obstacle avoidance, improving on the performance of a reactive agent which can only plan one step. We achieve this in near real-time using no pre-computed data. While our method has limitations, we believe our approach shows promise as an avenue for the development of safe, reliable and transparent trajectory planning in the context of autonomous vehicles.
* In Proceedings FMAS 2023, arXiv:2311.08987