Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosed-loop multi-step planning with innate physics knowledge
Paper and Code
Nov 18, 2024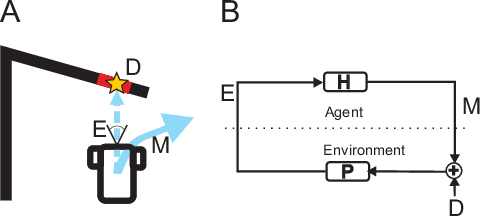
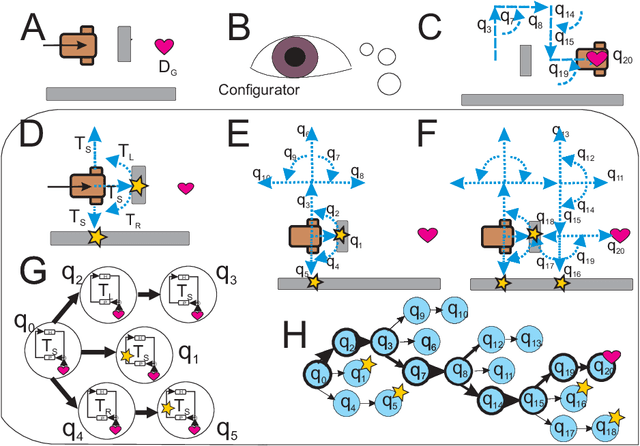
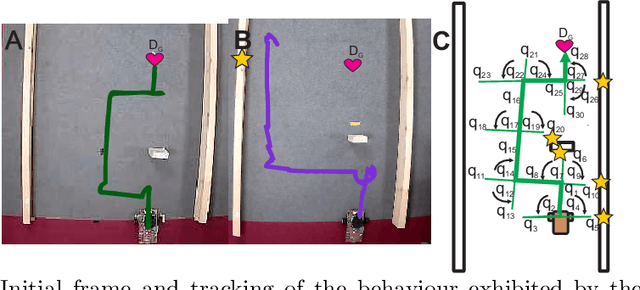
We present a hierarchical framework to solve robot planning as an input control problem. At the lowest level are temporary closed control loops, ("tasks"), each representing a behaviour, contingent on a specific sensory input and therefore temporary. At the highest level, a supervising "Configurator" directs task creation and termination. Here resides "core" knowledge as a physics engine, where sequences of tasks can be simulated. The Configurator encodes and interprets simulation results,based on which it can choose a sequence of tasks as a plan. We implement this framework on a real robot and test it in an overtaking scenario as proof-of-concept.
View paper on