 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation and Model Checking for Close to Realtime Overtaking Planning
Oct 25, 2021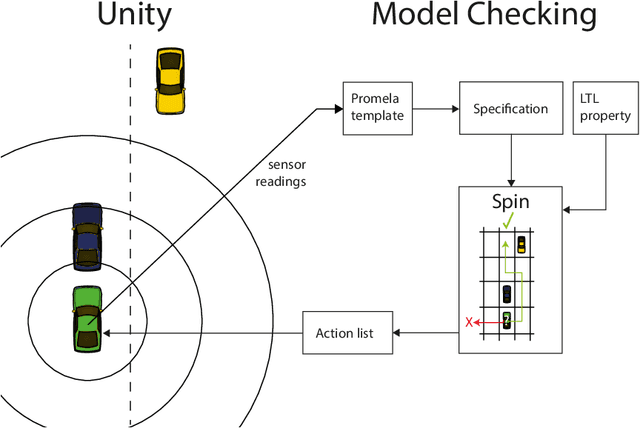
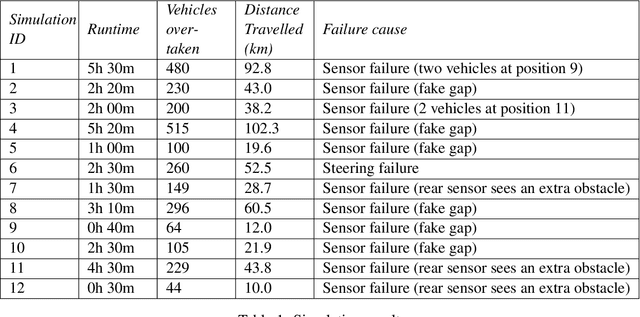
Fast and reliable trajectory planning is a key requirement of autonomous vehicles. In this paper we introduce a novel technique for planning the route of an autonomous vehicle on a straight rural road using the Spin model checker. We show how we can combine Spins ability to identify paths violating temporal properties with sensor information from a 3D Unity simulation of an autonomous vehicle, to plan and perform consecutive overtaking manoeuvres on a traffic heavy road. This involves discretising the sensory information and combining multiple sequential Spin models with a Linear Time Temporal Logic specification to generate an error path. This path provides the autonomous vehicle with an action plan. The entire process takes place in close to realtime using no precomputed data and the action plan is specifically tailored for individual scenarios. Our experiments demonstrate that the simulated autonomous vehicle implementing our approach can drive on average at least 40km and overtake 214 vehicles before experiencing a collision, which is usually caused by inaccuracies in the sensory system. While the proposed system has some drawbacks, we believe that our novel approach demonstrates a potentially powerful future tool for efficient trajectory planning for autonomous vehicles.
* In Proceedings FMAS 2021, arXiv:2110.11527