 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Scan-n-Print for Wire Arc Additive Manufacturing
Nov 24, 2024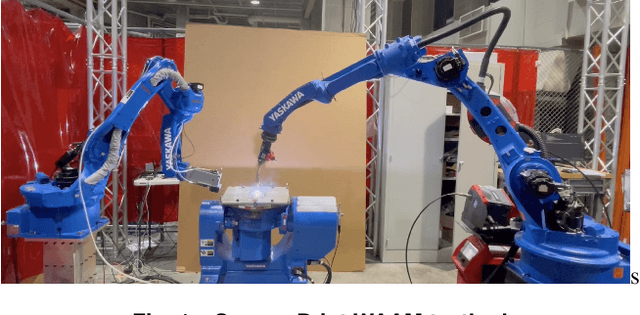
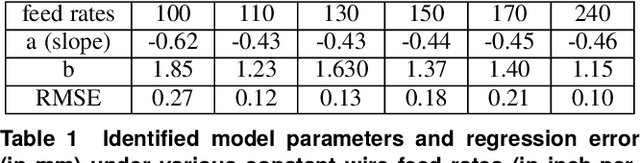
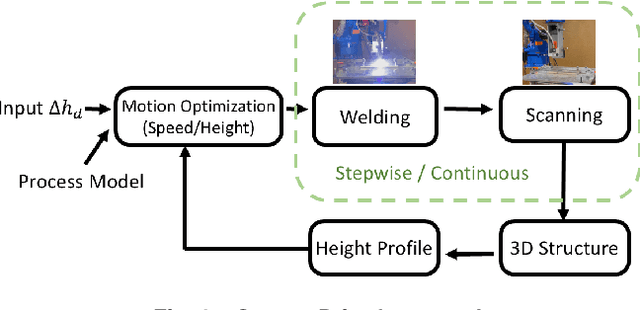
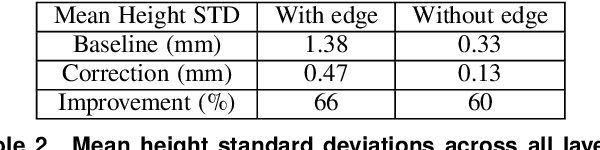
Robotic Wire Arc Additive Manufacturing (WAAM) is a metal additive manufacturing technology, offering flexible 3D printing while ensuring high quality near-net-shape final parts. However, WAAM also suffers from geometric imprecision, especially for low-melting-point metal such as aluminum alloys. In this paper, we present a multi-robot framework for WAAM process monitoring and control. We consider a three-robot setup: a 6-dof welding robot, a 2-dof trunnion platform, and a 6-dof sensing robot with a wrist-mounted laser line scanner measuring the printed part height profile. The welding parameters, including the wire feed rate, are held constant based on the materials used, so the control input is the robot path speed. The measured output is the part height profile. The planning phase decomposes the target shape into slices of uniform height. During runtime, the sensing robot scans each printed layer, and the robot path speed for the next layer is adjusted based on the deviation from the desired profile. The adjustment is based on an identified model correlating the path speed to change in height. The control architecture coordinates the synchronous motion and data acquisition between all robots and sensors. Using a three-robot WAAM testbed, we demonstrate significant improvements of the closed loop scan-n-print approach over the current open loop result on both a flat wall and a more complex turbine blade shape.
Open-Source Software Architecture for Multi-Robot Wire Arc Additive Manufacturing (WAAM)
Aug 08, 2024Wire Arc Additive Manufacturing (WAAM) is a metal 3D printing technology that deposits molten metal wire on a substrate to form desired geometries. Articulated robot arms are commonly used in WAAM to produce complex geometric shapes. However, they mostly rely on proprietary robot and weld control software that limits process tuning and customization, incorporation of third-party sensors, implementation on robots and weld controllers from multiple vendors, and customizable user programming. This paper presents a general open-source software architecture for WAAM that addresses these limitations. The foundation of this architecture is Robot Raconteur, an open-source control and communication framework that serves as the middleware for integrating robots and sensors from different vendors. Based on this architecture, we developed an end-to-end robotic WAAM implementation that takes a CAD file to a printed WAAM part and evaluates the accuracy of the result. The major components in the architecture include part slicing, robot motion planning, part metrology, in-process sensing, and process tuning. The current implementation is based on Motoman robots and Fronius weld controller, but the approach is applicable to other industrial robots and weld controllers. The capability of the WAAM tested is demonstrated through the printing of parts of various geometries and acquisition of in-process sensor data for motion adjustment.
Fast and Accurate Relative Motion Tracking for Two Industrial Robots
Apr 10, 2024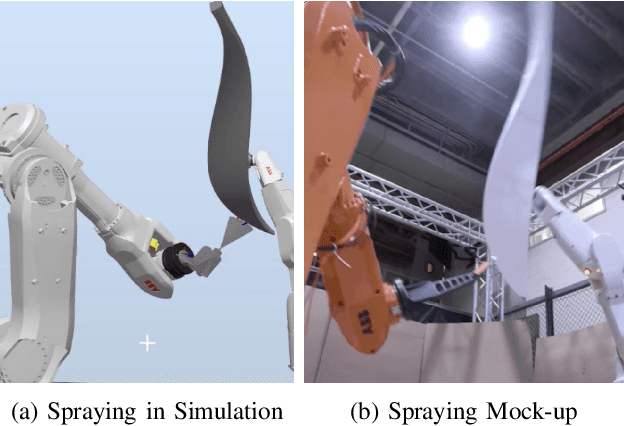
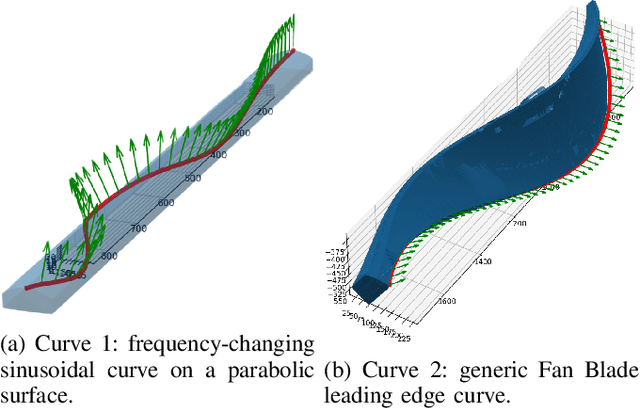
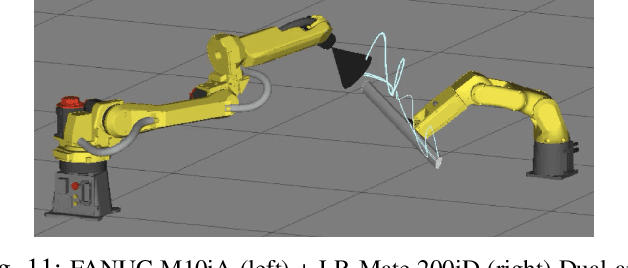

Industrial robotic applications such as spraying, welding, and additive manufacturing frequently require fast, accurate, and uniform motion along a 3D spatial curve. To increase process throughput, some manufacturers propose a dual-robot setup to overcome the speed limitation of a single robot. Industrial robot motion is programmed through waypoints connected by motion primitives (Cartesian linear and circular paths and linear joint paths at constant Cartesian speed). The actual robot motion is affected by the blending between these motion primitives and the pose of the robot (an outstretched/close to singularity pose tends to have larger path-tracking errors). Choosing the waypoints and the speed along each motion segment to achieve the performance requirement is challenging. At present, there is no automated solution, and laborious manual tuning by robot experts is needed to approach the desired performance. In this paper, we present a systematic three-step approach to designing and programming a dual-robot system to optimize system performance. The first step is to select the relative placement between the two robots based on the specified relative motion path. The second step is to select the relative waypoints and the motion primitives. The final step is to update the waypoints iteratively based on the actual relative motion. Waypoint iteration is first executed in simulation and then completed using the actual robots. For performance measures, we use the mean path speed subject to the relative position and orientation constraints and the path speed uniformity constraint. We have demonstrated the effectiveness of this method with ABB and FANUC robots on two challenging test curves. The performance improvement over the current industrial practice baseline is over 300%. Compared to the optimized single-arm case that we have previously reported, the improvement is over 14%.
High-Speed High-Accuracy Spatial Curve Tracking Using Motion Primitives in Industrial Robots
Jan 06, 2023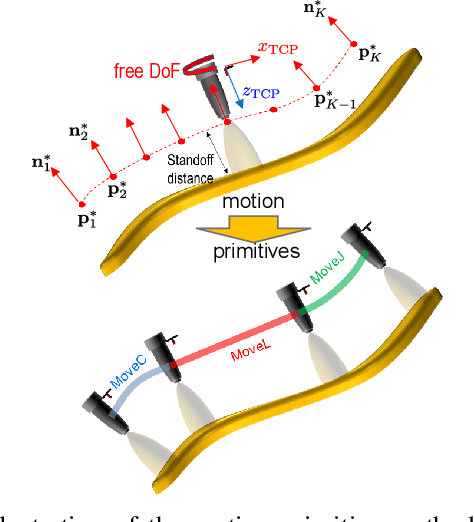
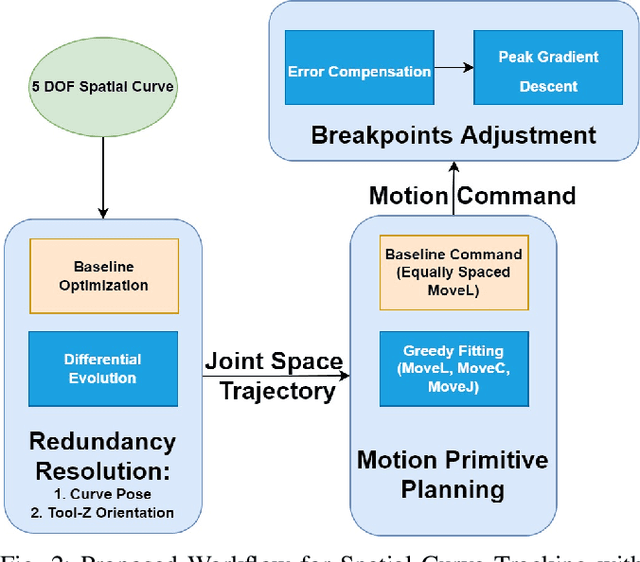
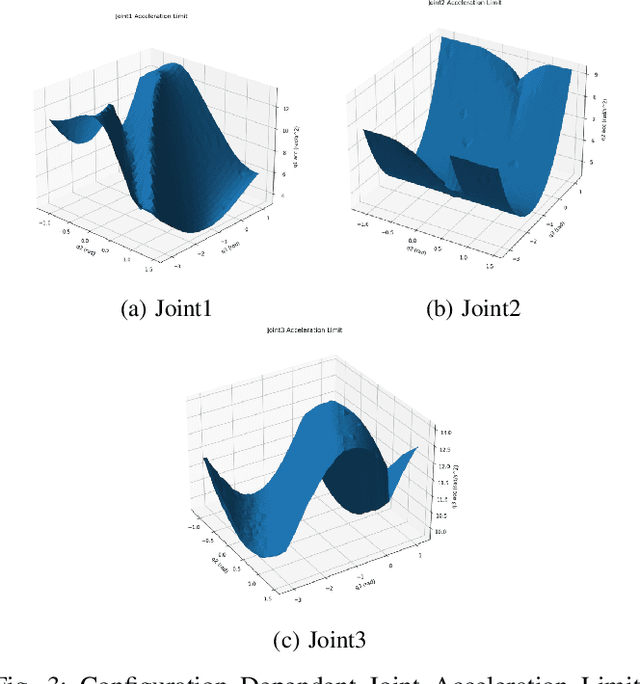
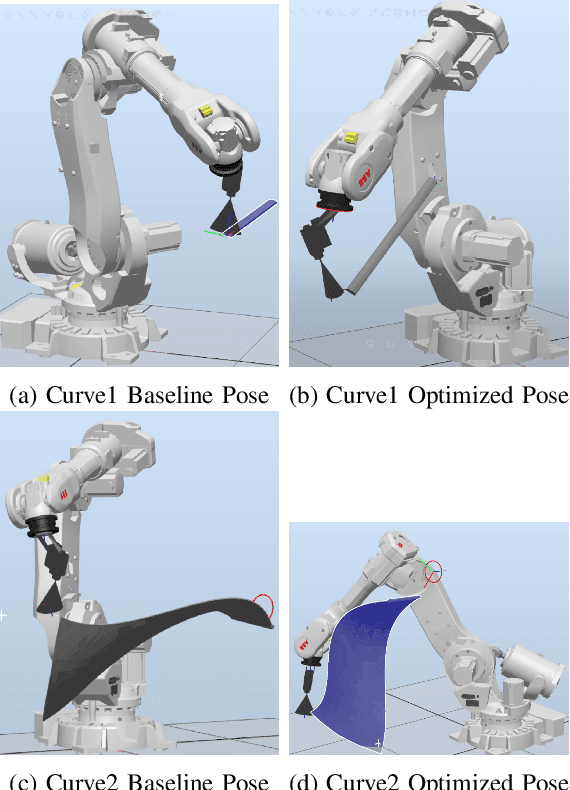
Industrial robots are increasingly deployed in applications requiring an end effector tool to closely track a specified path, such as in spraying and welding. Performance and productivity present possibly conflicting objectives: tracking accuracy, path speed, and motion uniformity. Industrial robots are programmed through motion primitives consisting of waypoints connected by pre-defined motion segments, with specified parameters such as path speed and blending zone. The actual executed robot motion depends on the robot joint servo controller and joint motion constraints (velocity, acceleration, etc.) which are largely unknown to the users. Programming a robot to achieve the desired performance today is time-consuming and mostly manual, requiring tuning a large number of coupled parameters in the motion primitives. The performance also depends on the choice of additional parameters: possible redundant degrees of freedom, location of the target curve, and the robot configuration. This paper presents a systematic approach to optimize the robot motion primitives for performance. The approach first selects the static parameters, then the motion primitives, and finally iteratively update the waypoints to minimize the tracking error. The ultimate performance objective is to maximize the path speed subject to the tracking accuracy and speed uniformity constraints over the entire path. We have demonstrated the effectiveness of this approach in simulation for ABB and FANUC robots for two challenging example curves, and experimentally for an ABB robot. Comparing with the baseline using the current industry practice, the optimized performance shows over 200% performance improvement.
Neuro-symbolic Models for Interpretable Time Series Classification using Temporal Logic Description
Sep 15, 2022
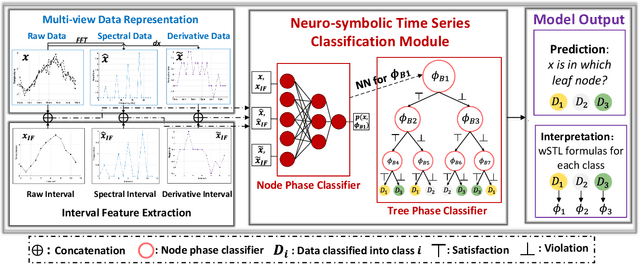
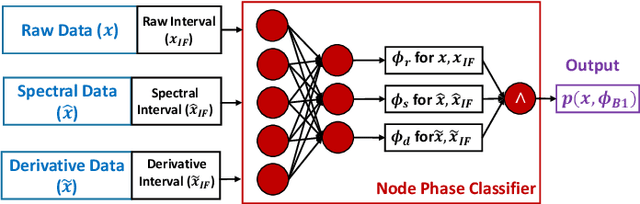
Most existing Time series classification (TSC) models lack interpretability and are difficult to inspect. Interpretable machine learning models can aid in discovering patterns in data as well as give easy-to-understand insights to domain specialists. In this study, we present Neuro-Symbolic Time Series Classification (NSTSC), a neuro-symbolic model that leverages signal temporal logic (STL) and neural network (NN) to accomplish TSC tasks using multi-view data representation and expresses the model as a human-readable, interpretable formula. In NSTSC, each neuron is linked to a symbolic expression, i.e., an STL (sub)formula. The output of NSTSC is thus interpretable as an STL formula akin to natural language, describing temporal and logical relations hidden in the data. We propose an NSTSC-based classifier that adopts a decision-tree approach to learn formula structures and accomplish a multiclass TSC task. The proposed smooth activation functions for wSTL allow the model to be learned in an end-to-end fashion. We test NSTSC on a real-world wound healing dataset from mice and benchmark datasets from the UCR time-series repository, demonstrating that NSTSC achieves comparable performance with the state-of-the-art models. Furthermore, NSTSC can generate interpretable formulas that match with domain knowledge.
Weighted Graph-Based Signal Temporal Logic Inference Using Neural Networks
Sep 16, 2021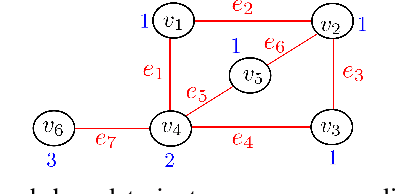
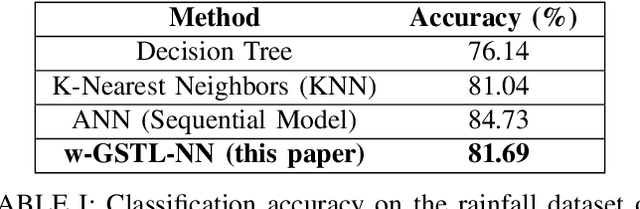
Extracting spatial-temporal knowledge from data is useful in many applications. It is important that the obtained knowledge is human-interpretable and amenable to formal analysis. In this paper, we propose a method that trains neural networks to learn spatial-temporal properties in the form of weighted graph-based signal temporal logic (wGSTL) formulas. For learning wGSTL formulas, we introduce a flexible wGSTL formula structure in which the user's preference can be applied in the inferred wGSTL formulas. In the proposed framework, each neuron of the neural networks corresponds to a subformula in a flexible wGSTL formula structure. We initially train a neural network to learn the wGSTL operators and then train a second neural network to learn the parameters in a flexible wGSTL formula structure. We use a COVID-19 dataset and a rain prediction dataset to evaluate the performance of the proposed framework and algorithms. We compare the performance of the proposed framework with three baseline classification methods including K-nearest neighbors, decision trees, and artificial neural networks. The classification accuracy obtained by the proposed framework is comparable with the baseline classification methods.
Neural Network for Weighted Signal Temporal Logic
Apr 08, 2021
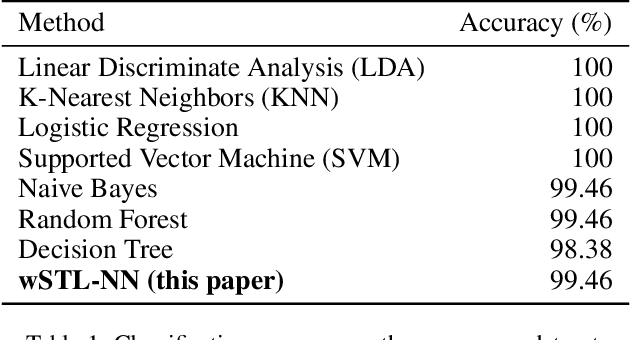
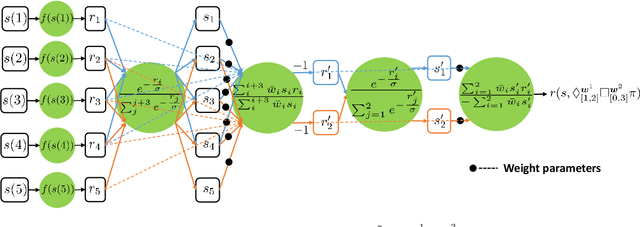
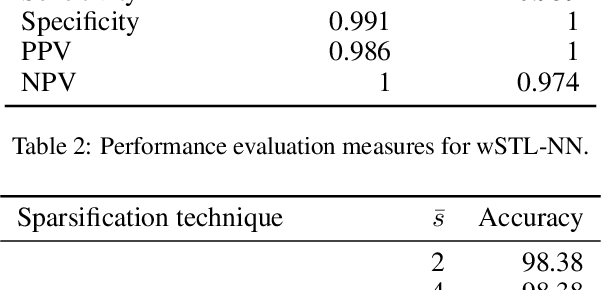
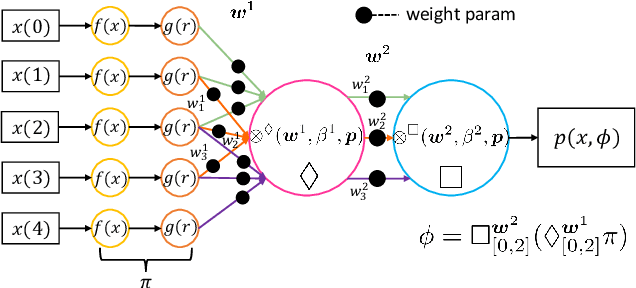
In this paper, we propose a neuro-symbolic framework called weighted Signal Temporal Logic Neural Network (wSTL-NN) that combines the characteristics of neural networks and temporal logics. Weighted Signal Temporal Logic (wSTL) formulas are recursively composed of subformulas that are combined using logical and temporal operators. The quantitative semantics of wSTL is defined such that the quantitative satisfaction of subformulas with higher weights has more influence on the quantitative satisfaction of the overall wSTL formula. In the wSTL-NN, each neuron corresponds to a wSTL subformula, and its output corresponds to the quantitative satisfaction of the formula. We use wSTL-NN to represent wSTL formulas as features to classify time series data. STL features are more explainable than those used in classical methods. The wSTL-NN is end-to-end differentiable, which allows learning of wSTL formulas to be done using back-propagation. To reduce the number of weights, we introduce two techniques to sparsify the wSTL-NN.We apply our framework to an occupancy detection time-series dataset to learn a classifier that predicts the occupancy status of an office room.
Census Signal Temporal Logic Inference for Multi-Agent Group Behavior Analysis
Oct 05, 2016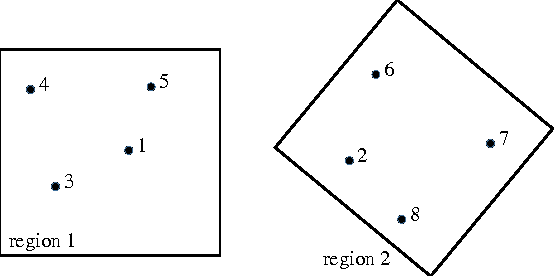
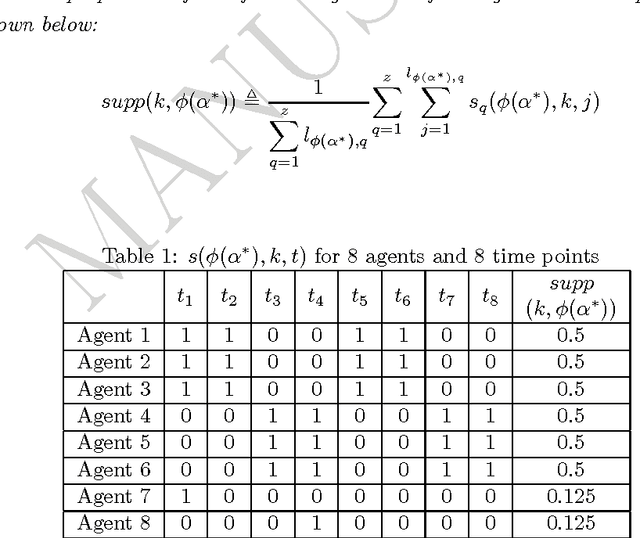
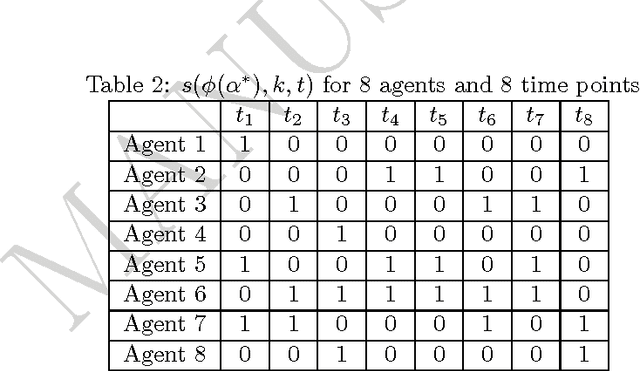
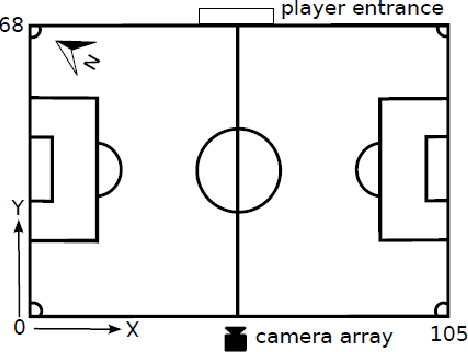
In this paper, we define a novel census signal temporal logic (CensusSTL) that focuses on the number of agents in different subsets of a group that complete a certain task specified by the signal temporal logic (STL). CensusSTL consists of an "inner logic" STL formula and an "outer logic" STL formula. We present a new inference algorithm to infer CensusSTL formulae from the trajectory data of a group of agents. We first identify the "inner logic" STL formula and then infer the subgroups based on whether the agents' behaviors satisfy the "inner logic" formula at each time point. We use two different approaches to infer the subgroups based on similarity and complementarity, respectively. The "outer logic" CensusSTL formula is inferred from the census trajectories of different subgroups. We apply the algorithm in analyzing data from a soccer match by inferring the CensusSTL formula for different subgroups of a soccer team.