 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Scan-n-Print for Wire Arc Additive Manufacturing
Nov 24, 2024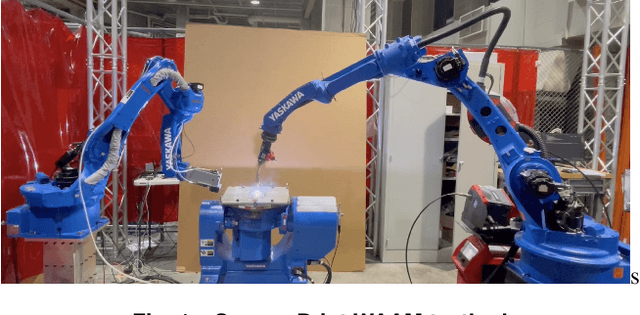
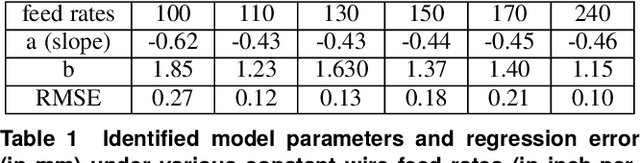
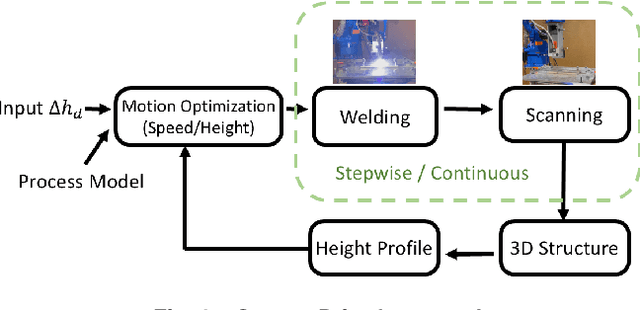
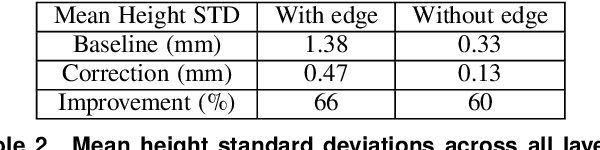
Robotic Wire Arc Additive Manufacturing (WAAM) is a metal additive manufacturing technology, offering flexible 3D printing while ensuring high quality near-net-shape final parts. However, WAAM also suffers from geometric imprecision, especially for low-melting-point metal such as aluminum alloys. In this paper, we present a multi-robot framework for WAAM process monitoring and control. We consider a three-robot setup: a 6-dof welding robot, a 2-dof trunnion platform, and a 6-dof sensing robot with a wrist-mounted laser line scanner measuring the printed part height profile. The welding parameters, including the wire feed rate, are held constant based on the materials used, so the control input is the robot path speed. The measured output is the part height profile. The planning phase decomposes the target shape into slices of uniform height. During runtime, the sensing robot scans each printed layer, and the robot path speed for the next layer is adjusted based on the deviation from the desired profile. The adjustment is based on an identified model correlating the path speed to change in height. The control architecture coordinates the synchronous motion and data acquisition between all robots and sensors. Using a three-robot WAAM testbed, we demonstrate significant improvements of the closed loop scan-n-print approach over the current open loop result on both a flat wall and a more complex turbine blade shape.
Open-Source Software Architecture for Multi-Robot Wire Arc Additive Manufacturing (WAAM)
Aug 08, 2024Wire Arc Additive Manufacturing (WAAM) is a metal 3D printing technology that deposits molten metal wire on a substrate to form desired geometries. Articulated robot arms are commonly used in WAAM to produce complex geometric shapes. However, they mostly rely on proprietary robot and weld control software that limits process tuning and customization, incorporation of third-party sensors, implementation on robots and weld controllers from multiple vendors, and customizable user programming. This paper presents a general open-source software architecture for WAAM that addresses these limitations. The foundation of this architecture is Robot Raconteur, an open-source control and communication framework that serves as the middleware for integrating robots and sensors from different vendors. Based on this architecture, we developed an end-to-end robotic WAAM implementation that takes a CAD file to a printed WAAM part and evaluates the accuracy of the result. The major components in the architecture include part slicing, robot motion planning, part metrology, in-process sensing, and process tuning. The current implementation is based on Motoman robots and Fronius weld controller, but the approach is applicable to other industrial robots and weld controllers. The capability of the WAAM tested is demonstrated through the printing of parts of various geometries and acquisition of in-process sensor data for motion adjustment.