 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRedundancy Parameterization of the ABB YuMi Robot Arm
May 29, 2025



The ABB YuMi is a 7-DOF collaborative robot arm with a complex, redundant kinematic structure. Path planning for the YuMi is challenging, especially with joint limits considered. The redundant degree of freedom is parameterized by the Shoulder-Elbow-Wrist (SEW) angle, called the arm angle by ABB, but the exact definition must be known for path planning outside the RobotStudio simulator. We provide the first complete and validated definition of the SEW angle used for the YuMi. It follows the conventional SEW angle formulation with the shoulder-elbow direction chosen to be the direction of the fourth joint axis. Our definition also specifies the shoulder location, making it compatible with any choice of reference vector. A previous attempt to define the SEW angle exists in the literature, but it is incomplete and deviates from the behavior observed in RobotStudio. Because our formulation fits within the general SEW angle framework, we also obtain the expression for the SEW angle Jacobian and complete numerical conditions for all algorithmic singularities. Finally, we demonstrate using IK-Geo, our inverse kinematics (IK) solver based on subproblem decomposition, to find all IK solutions using 2D search. Code examples are available in a publicly accessible repository.
Path Planning and Optimization for Cuspidal 6R Manipulators
Jan 30, 2025
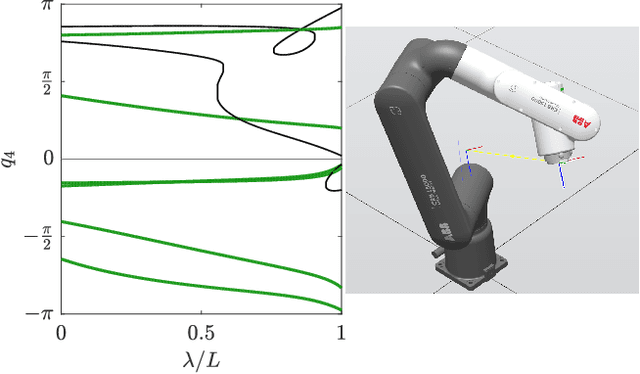
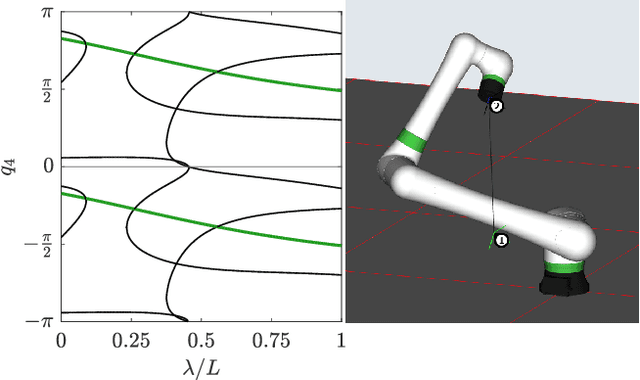
A cuspidal robot can move from one inverse kinematics (IK) solution to another without crossing a singularity. Multiple industrial robots are cuspidal. They tend to have a beautiful mechanical design, but they pose path planning challenges. A task-space path may have a valid IK solution for each point along the path, but a continuous joint-space path may depend on the choice of the IK solution or even be infeasible. This paper presents new analysis, path planning, and optimization methods to enhance the utility of cuspidal robots. We first demonstrate an efficient method to identify cuspidal robots and show, for the first time, that the ABB GoFa and certain robots with three parallel joint axes are cuspidal. We then propose a new path planning method for cuspidal robots by finding all IK solutions for each point along a task-space path and constructing a graph to connect each vertex corresponding to an IK solution. Graph edges are weighted based on the optimization metric, such as minimizing joint velocity. The optimal feasible path is the shortest path in the graph. This method can find non-singular paths as well as smooth paths which pass through singularities. Finally, this path planning method is incorporated into a path optimization algorithm. Given a fixed workspace toolpath, we optimize the offset of the toolpath in the robot base frame while ensuring continuous joint motion. Code examples are available in a publicly accessible repository.
Robotic Wire Arc Additive Manufacturing with Variable Height Layers
Dec 05, 2024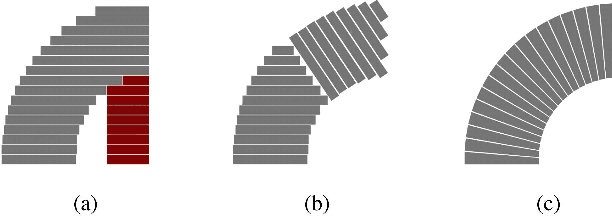
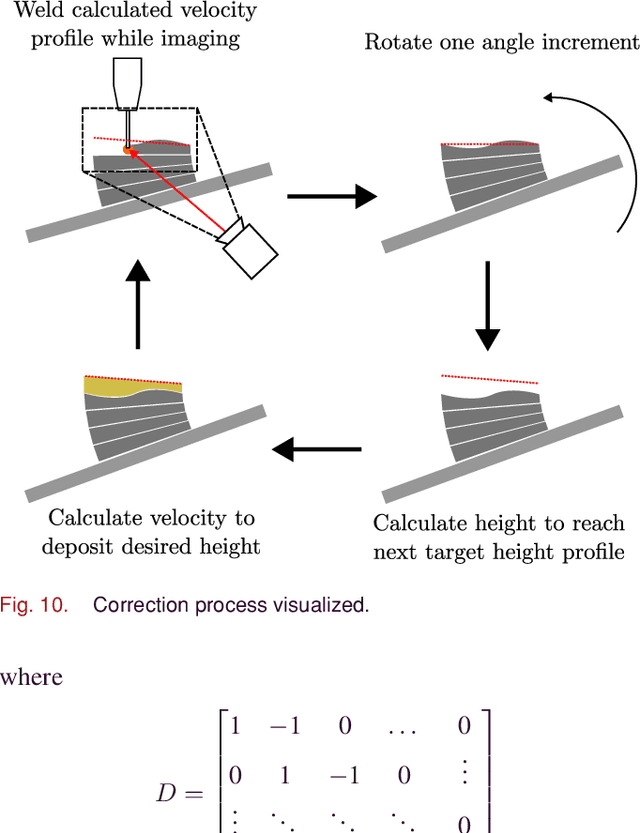

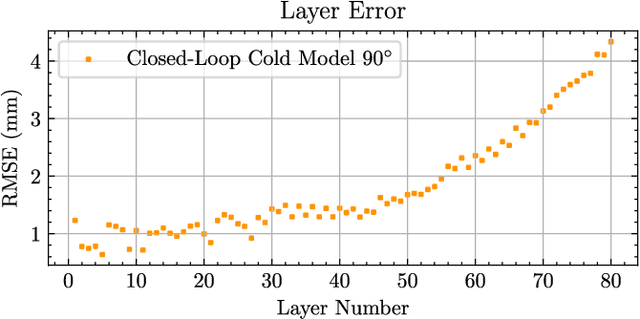
Robotic wire arc additive manufacturing has been widely adopted due to its high deposition rates and large print volume relative to other metal additive manufacturing processes. For complex geometries, printing with variable height within layers offer the advantage of producing overhangs without the need for support material or geometric decomposition. This approach has been demonstrated for steel using precomputed robot speed profiles to achieve consistent geometric quality. In contrast, aluminum exhibits a bead geometry that is tightly coupled to the temperature of the previous layer, resulting in significant changes to the height of the deposited material at different points in the part. This paper presents a closed-loop approach to correcting for variations in the height of the deposited material between layers. We use an IR camera mounted on a separate robot to track the welding flame and estimate the height of deposited material. The robot velocity profile is then updated to account for the error in the previous layer and the nominal planned height profile while factoring in process and system constraints. Implementation of this framework showed significant improvement over the open-loop case and demonstrated robustness to inaccurate model parameters.
Multi-Robot Scan-n-Print for Wire Arc Additive Manufacturing
Nov 24, 2024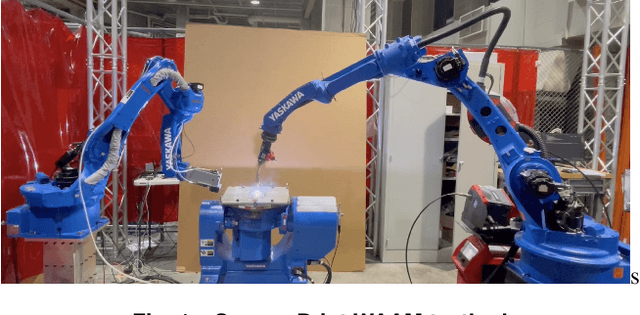
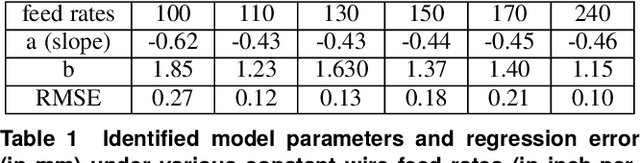
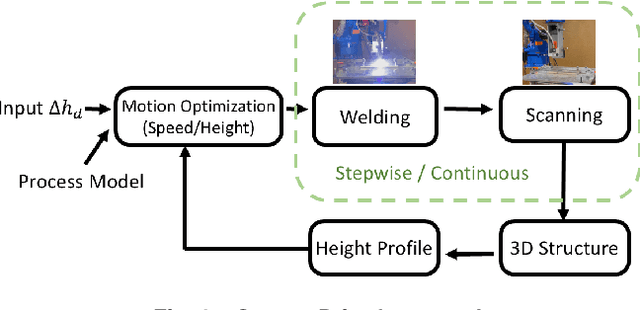
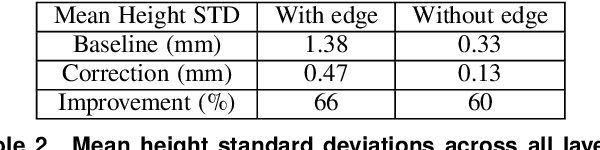
Robotic Wire Arc Additive Manufacturing (WAAM) is a metal additive manufacturing technology, offering flexible 3D printing while ensuring high quality near-net-shape final parts. However, WAAM also suffers from geometric imprecision, especially for low-melting-point metal such as aluminum alloys. In this paper, we present a multi-robot framework for WAAM process monitoring and control. We consider a three-robot setup: a 6-dof welding robot, a 2-dof trunnion platform, and a 6-dof sensing robot with a wrist-mounted laser line scanner measuring the printed part height profile. The welding parameters, including the wire feed rate, are held constant based on the materials used, so the control input is the robot path speed. The measured output is the part height profile. The planning phase decomposes the target shape into slices of uniform height. During runtime, the sensing robot scans each printed layer, and the robot path speed for the next layer is adjusted based on the deviation from the desired profile. The adjustment is based on an identified model correlating the path speed to change in height. The control architecture coordinates the synchronous motion and data acquisition between all robots and sensors. Using a three-robot WAAM testbed, we demonstrate significant improvements of the closed loop scan-n-print approach over the current open loop result on both a flat wall and a more complex turbine blade shape.
Open-Source Software Architecture for Multi-Robot Wire Arc Additive Manufacturing (WAAM)
Aug 08, 2024Wire Arc Additive Manufacturing (WAAM) is a metal 3D printing technology that deposits molten metal wire on a substrate to form desired geometries. Articulated robot arms are commonly used in WAAM to produce complex geometric shapes. However, they mostly rely on proprietary robot and weld control software that limits process tuning and customization, incorporation of third-party sensors, implementation on robots and weld controllers from multiple vendors, and customizable user programming. This paper presents a general open-source software architecture for WAAM that addresses these limitations. The foundation of this architecture is Robot Raconteur, an open-source control and communication framework that serves as the middleware for integrating robots and sensors from different vendors. Based on this architecture, we developed an end-to-end robotic WAAM implementation that takes a CAD file to a printed WAAM part and evaluates the accuracy of the result. The major components in the architecture include part slicing, robot motion planning, part metrology, in-process sensing, and process tuning. The current implementation is based on Motoman robots and Fronius weld controller, but the approach is applicable to other industrial robots and weld controllers. The capability of the WAAM tested is demonstrated through the printing of parts of various geometries and acquisition of in-process sensor data for motion adjustment.
Fast and Accurate Relative Motion Tracking for Two Industrial Robots
Apr 10, 2024
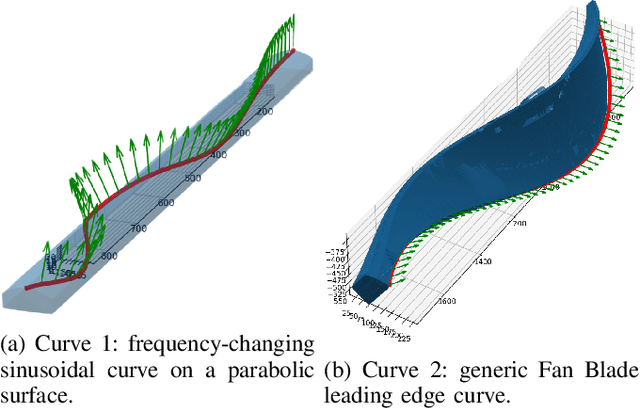
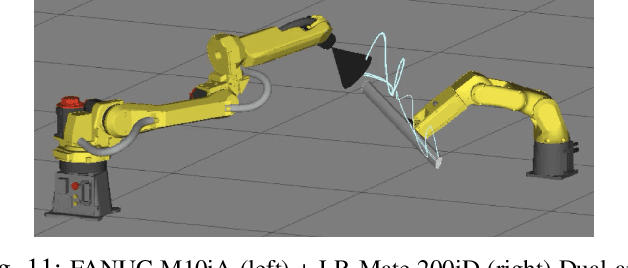

Industrial robotic applications such as spraying, welding, and additive manufacturing frequently require fast, accurate, and uniform motion along a 3D spatial curve. To increase process throughput, some manufacturers propose a dual-robot setup to overcome the speed limitation of a single robot. Industrial robot motion is programmed through waypoints connected by motion primitives (Cartesian linear and circular paths and linear joint paths at constant Cartesian speed). The actual robot motion is affected by the blending between these motion primitives and the pose of the robot (an outstretched/close to singularity pose tends to have larger path-tracking errors). Choosing the waypoints and the speed along each motion segment to achieve the performance requirement is challenging. At present, there is no automated solution, and laborious manual tuning by robot experts is needed to approach the desired performance. In this paper, we present a systematic three-step approach to designing and programming a dual-robot system to optimize system performance. The first step is to select the relative placement between the two robots based on the specified relative motion path. The second step is to select the relative waypoints and the motion primitives. The final step is to update the waypoints iteratively based on the actual relative motion. Waypoint iteration is first executed in simulation and then completed using the actual robots. For performance measures, we use the mean path speed subject to the relative position and orientation constraints and the path speed uniformity constraint. We have demonstrated the effectiveness of this method with ABB and FANUC robots on two challenging test curves. The performance improvement over the current industrial practice baseline is over 300%. Compared to the optimized single-arm case that we have previously reported, the improvement is over 14%.
Redundancy parameterization and inverse kinematics of 7-DOF revolute manipulators
Jul 24, 2023
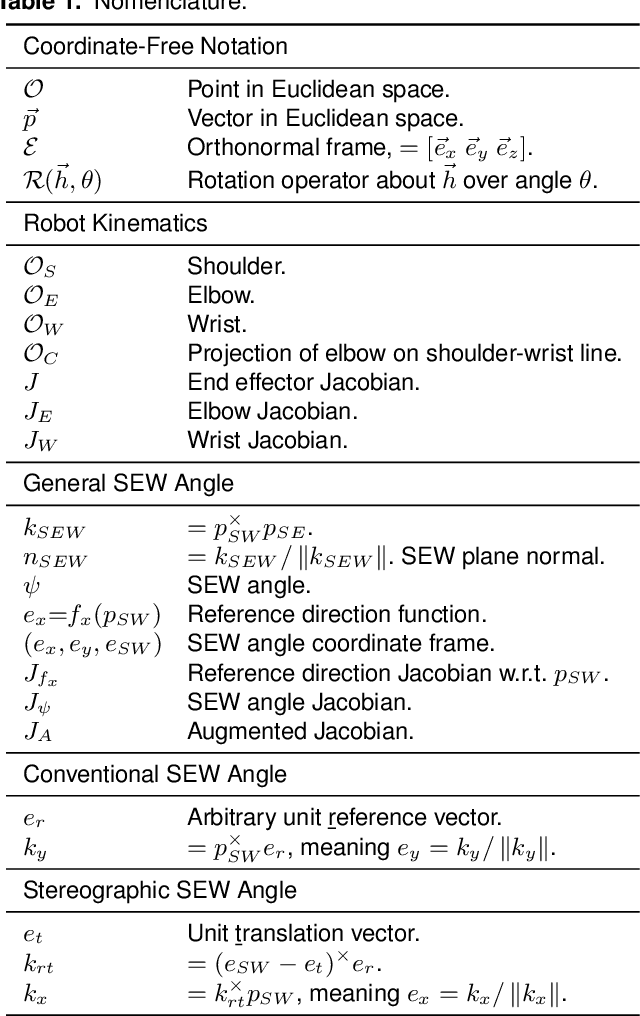

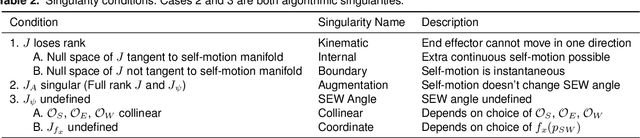
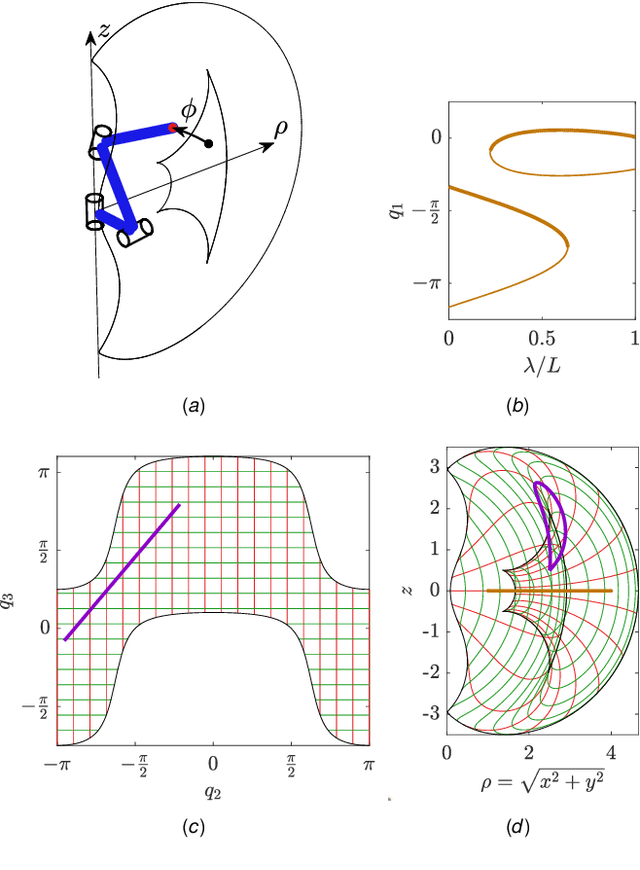
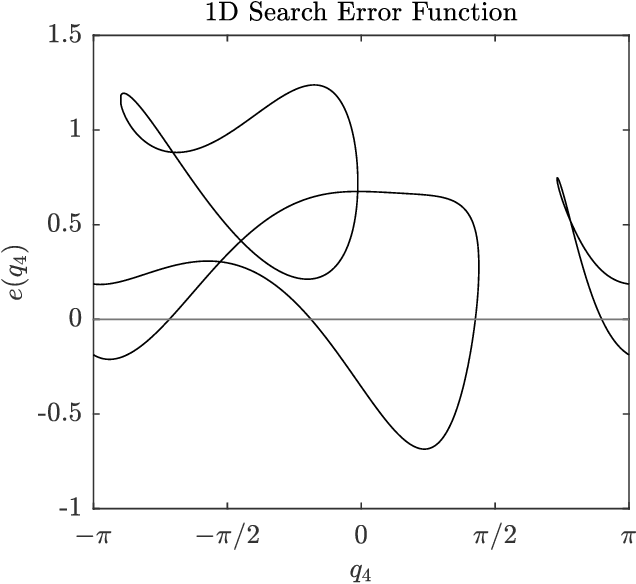
Seven degree-of-freedom (DOF) robot arms have one redundant DOF which does not change the translational or rotational motion of the end effector. The redundant DOF offers greater manipulability of the arm configuration to avoid obstacles and steer away from singularities, but it must be parameterized to fully specify the joint angles for a given end effector pose. For 7-DOF revolute (7R) manipulators, we introduce a new concept of generalized shoulder-elbow-wrist (SEW) angle, a generalization of the conventional SEW angle but with an arbitrary choice of the reference direction function. The SEW angle is easy for human operators to visualize as a rotation of the elbow about the line from the shoulder to the wrist and has been used in the teleoperation of space robot arms. Since the conventional SEW angle formulation is prone to singularities, we introduce a special choice of the reference direction function called the stereographic SEW angle which has a singularity in only one direction in the workspace. We prove that such a singularity is unavoidable for any parameterization. We also include expressions for the SEW angle Jacobian along with singularity analysis. Finally, we provide inverse kinematics solutions for most known 7R manipulators using the general SEW angle and the subproblem decomposition method. These solutions are often closed-form but may sometimes involve a 1D or 2D search. Inverse kinematics solutions, examples, and evaluations are available in a publicly accessible repository.
High-Speed High-Accuracy Spatial Curve Tracking Using Motion Primitives in Industrial Robots
Jan 06, 2023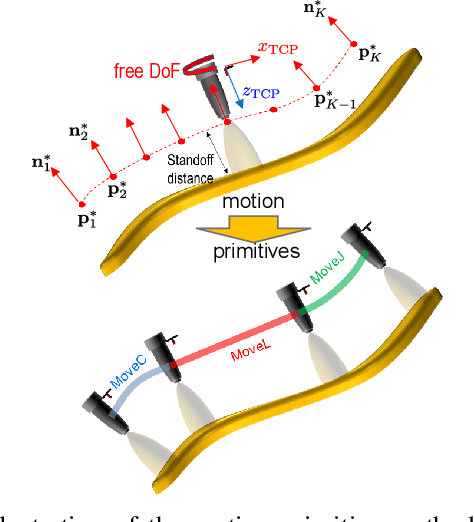
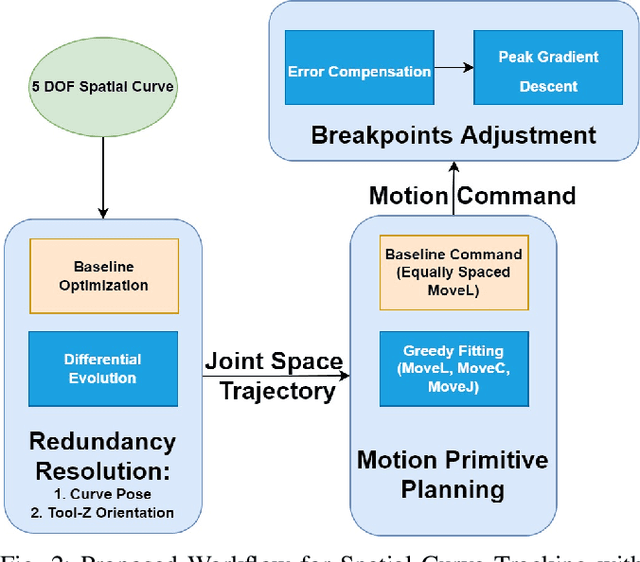
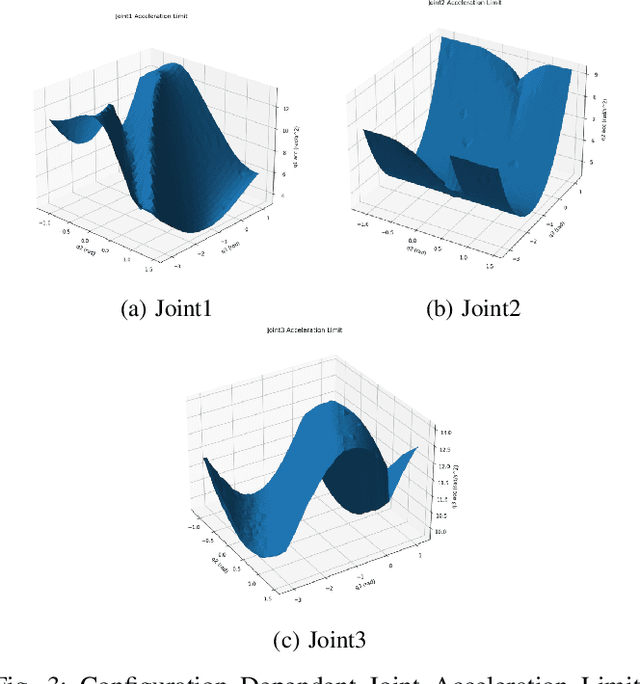
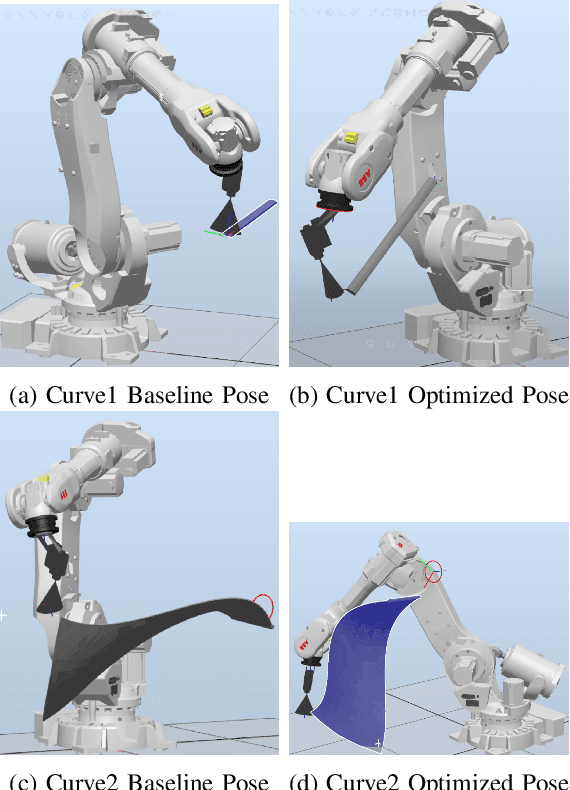
Industrial robots are increasingly deployed in applications requiring an end effector tool to closely track a specified path, such as in spraying and welding. Performance and productivity present possibly conflicting objectives: tracking accuracy, path speed, and motion uniformity. Industrial robots are programmed through motion primitives consisting of waypoints connected by pre-defined motion segments, with specified parameters such as path speed and blending zone. The actual executed robot motion depends on the robot joint servo controller and joint motion constraints (velocity, acceleration, etc.) which are largely unknown to the users. Programming a robot to achieve the desired performance today is time-consuming and mostly manual, requiring tuning a large number of coupled parameters in the motion primitives. The performance also depends on the choice of additional parameters: possible redundant degrees of freedom, location of the target curve, and the robot configuration. This paper presents a systematic approach to optimize the robot motion primitives for performance. The approach first selects the static parameters, then the motion primitives, and finally iteratively update the waypoints to minimize the tracking error. The ultimate performance objective is to maximize the path speed subject to the tracking accuracy and speed uniformity constraints over the entire path. We have demonstrated the effectiveness of this approach in simulation for ABB and FANUC robots for two challenging example curves, and experimentally for an ABB robot. Comparing with the baseline using the current industry practice, the optimized performance shows over 200% performance improvement.
Canonical Subproblems for Robot Inverse Kinematics
Nov 10, 2022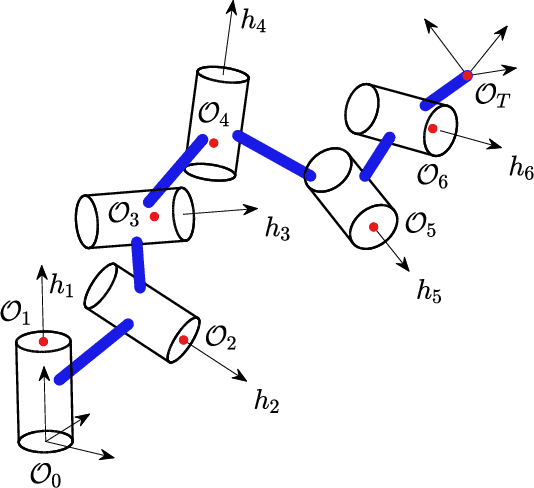
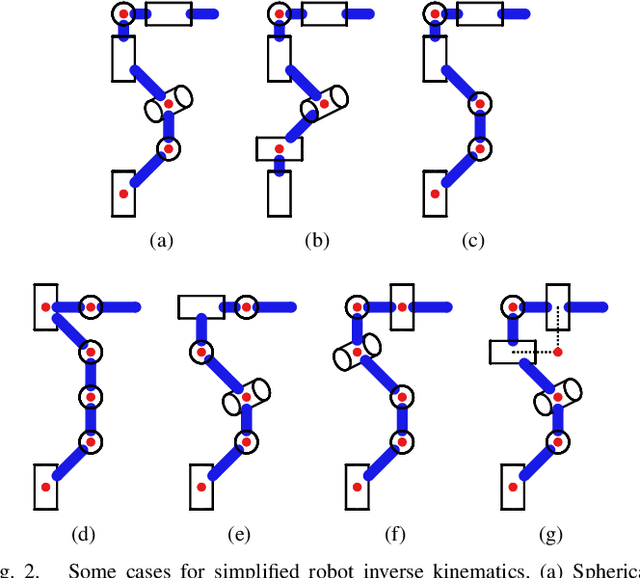
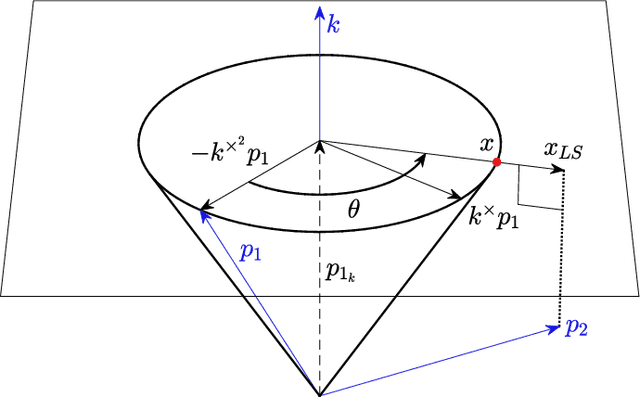
Inverse kinematics of many common types of robot manipulators may be decomposed into canonical subproblems. This paper presents new solution methods to six subproblems using a linear algebra approach. The first three subproblems, called the Paden-Kahan subproblems, are Subproblem 1: angle between a vector on the edge of a cone and a point, Subproblem 2: intersections between two cones, and Subproblem 3: intersections between a cone and a sphere. The other three subproblems, which have not been extensively covered in the literature, are Subproblem 4: intersections between a cone and a plane, Subproblem 5: intersections among three cones, and Subproblem 6: intersections in a system of four cones. We present algebraic solutions and geometric interpretations for each subproblem and provide computational performance comparisons. Our approach also finds the least-squares solutions for Subproblems 1-4 when the exact solution does not exist. We show that almost all 6-dof all revolute (6R) robots with known closed-form solutions may be solved using the subproblem decomposition method. For a general 6R robot, subproblem decomposition reduces finding all solutions to a search on a circle or a 2D torus. The software code is available on a publicly accessible repository.
Neural-Learning Trajectory Tracking Control of Flexible-Joint Robot Manipulators with Unknown Dynamics
Aug 08, 2019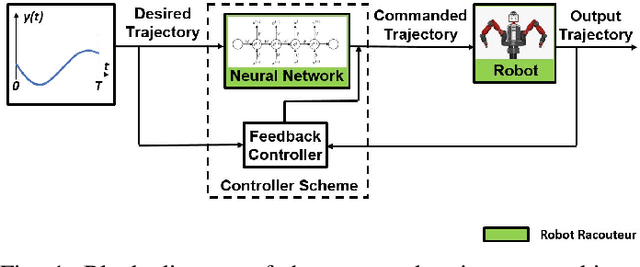
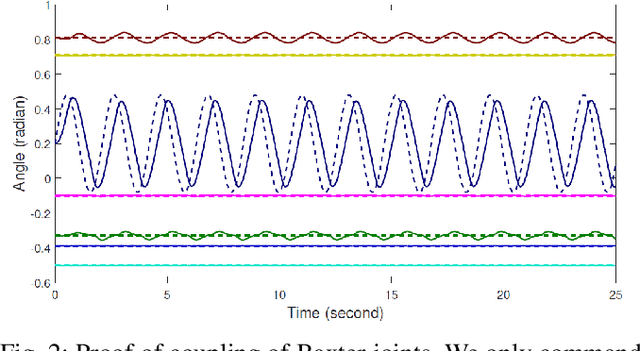
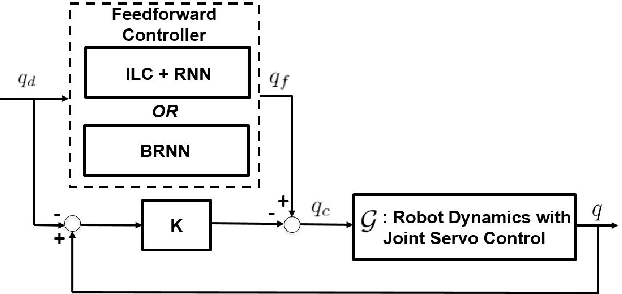
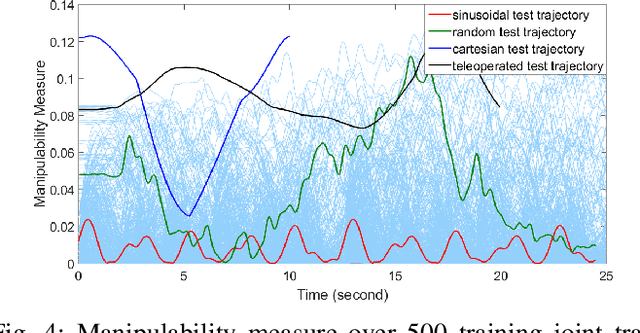
Fast and precise motion control is important for industrial robots in manufacturing applications. However, some collaborative robots sacrifice precision for safety, particular for high motion speed. The performance degradation is caused by the inability of the joint servo controller to address the uncertain nonlinear dynamics of the robot arm, e.g., due to joint flexibility. We consider two approaches to improve the trajectory tracking performance through feedforward compensation. The first approach uses iterative learning control, with the gradient-based iterative update generated from the robot forward dynamics model. The second approach uses dynamic inversion to directly compensate for the robot forward dynamics. If the forward dynamics is strictly proper or is non-minimum-phase (e.g., due to time delays), its stable inverse would be non-causal. Both approaches require robot dynamical models. This paper presents results of using recurrent neural networks (RNNs) to approximate these dynamical models-forward dynamics in the first case, inverse dynamics (possibly non-causal) in the second case. We use the bi-directional RNN to capture the noncausality. The RNNs are trained based on a collection of commanded trajectories and the actual robot responses. We use a Baxter robot to evaluate the two approaches. The Baxter robot exhibits significant joint flexibility due to the series-elastic joint actuators. Both approaches achieve sizable improvement over the uncompensated robot motion, for both random joint trajectories and Cartesian motion. The inverse dynamics method is particularly attractive as it may be used to more accurately track a user input as in teleoperation.