 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural-Learning Trajectory Tracking Control of Flexible-Joint Robot Manipulators with Unknown Dynamics
Paper and Code
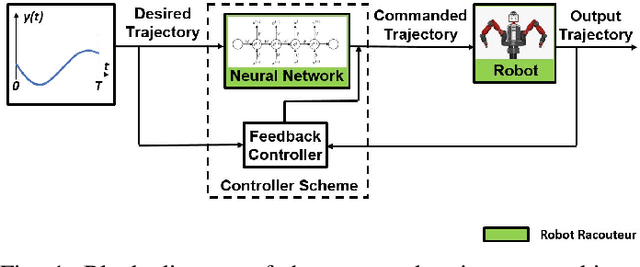
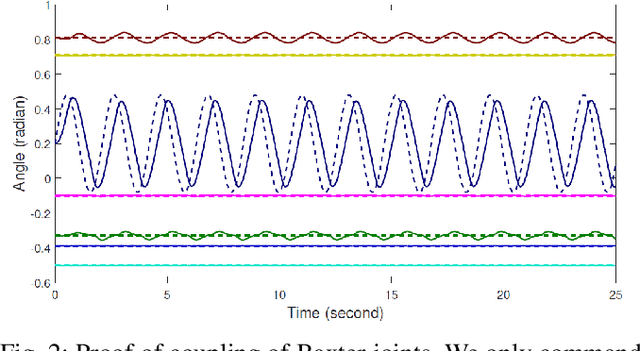
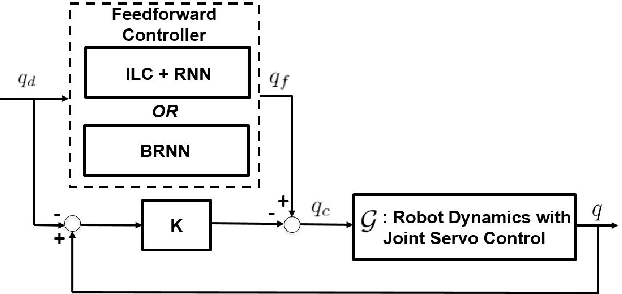
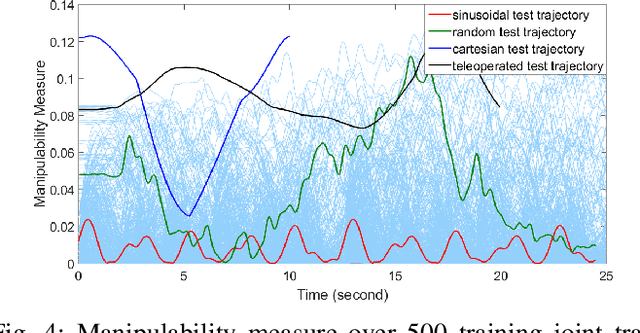
Fast and precise motion control is important for industrial robots in manufacturing applications. However, some collaborative robots sacrifice precision for safety, particular for high motion speed. The performance degradation is caused by the inability of the joint servo controller to address the uncertain nonlinear dynamics of the robot arm, e.g., due to joint flexibility. We consider two approaches to improve the trajectory tracking performance through feedforward compensation. The first approach uses iterative learning control, with the gradient-based iterative update generated from the robot forward dynamics model. The second approach uses dynamic inversion to directly compensate for the robot forward dynamics. If the forward dynamics is strictly proper or is non-minimum-phase (e.g., due to time delays), its stable inverse would be non-causal. Both approaches require robot dynamical models. This paper presents results of using recurrent neural networks (RNNs) to approximate these dynamical models-forward dynamics in the first case, inverse dynamics (possibly non-causal) in the second case. We use the bi-directional RNN to capture the noncausality. The RNNs are trained based on a collection of commanded trajectories and the actual robot responses. We use a Baxter robot to evaluate the two approaches. The Baxter robot exhibits significant joint flexibility due to the series-elastic joint actuators. Both approaches achieve sizable improvement over the uncompensated robot motion, for both random joint trajectories and Cartesian motion. The inverse dynamics method is particularly attractive as it may be used to more accurately track a user input as in teleoperation.