 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCanonical Subproblems for Robot Inverse Kinematics
Paper and Code
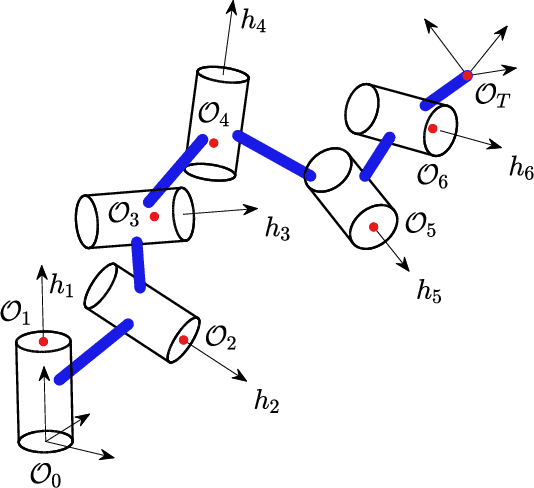
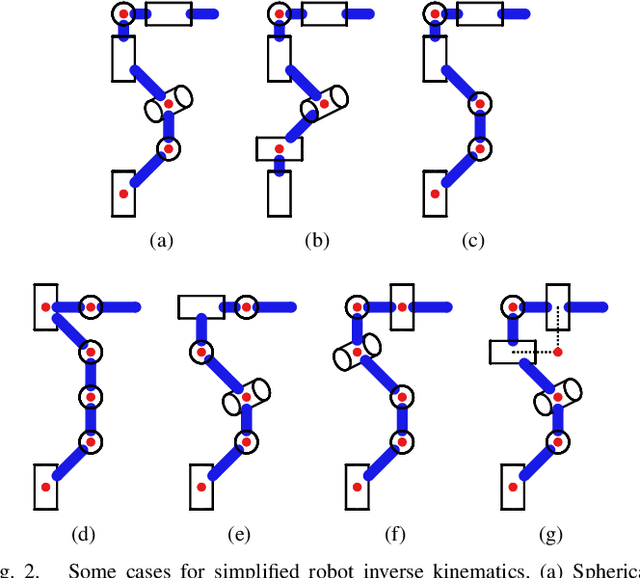
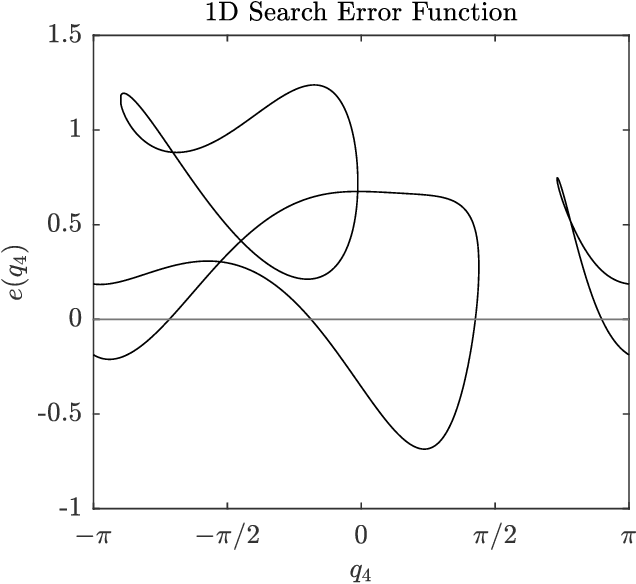
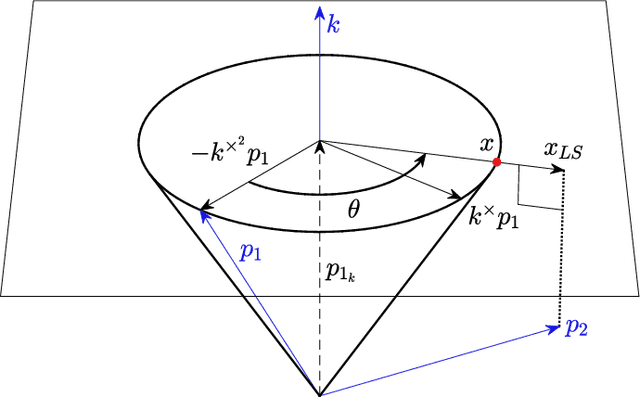
Inverse kinematics of many common types of robot manipulators may be decomposed into canonical subproblems. This paper presents new solution methods to six subproblems using a linear algebra approach. The first three subproblems, called the Paden-Kahan subproblems, are Subproblem 1: angle between a vector on the edge of a cone and a point, Subproblem 2: intersections between two cones, and Subproblem 3: intersections between a cone and a sphere. The other three subproblems, which have not been extensively covered in the literature, are Subproblem 4: intersections between a cone and a plane, Subproblem 5: intersections among three cones, and Subproblem 6: intersections in a system of four cones. We present algebraic solutions and geometric interpretations for each subproblem and provide computational performance comparisons. Our approach also finds the least-squares solutions for Subproblems 1-4 when the exact solution does not exist. We show that almost all 6-dof all revolute (6R) robots with known closed-form solutions may be solved using the subproblem decomposition method. For a general 6R robot, subproblem decomposition reduces finding all solutions to a search on a circle or a 2D torus. The software code is available on a publicly accessible repository.