 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRT-cache: Efficient Robot Trajectory Retrieval System
May 14, 2025



This paper introduces RT-cache, a novel trajectorymemory pipeline that accelerates real-world robot inference by leveraging big-data retrieval and learning from experience. While modern Vision-Language-Action (VLA) models can handle diverse robotic tasks, they often incur high per-step inference costs, resulting in significant latency, sometimes minutes per task. In contrast, RT-cache stores a large-scale Memory of previously successful robot trajectories and retrieves relevant multistep motion snippets, drastically reducing inference overhead. By integrating a Memory Builder with a Trajectory Retrieval, we develop an efficient retrieval process that remains tractable even for extremely large datasets. RT-cache flexibly accumulates real-world experiences and replays them whenever the current scene matches past states, adapting quickly to new or unseen environments with only a few additional samples. Experiments on the Open-X Embodiment Dataset and other real-world data demonstrate that RT-cache completes tasks both faster and more successfully than a baseline lacking retrieval, suggesting a practical, data-driven solution for real-time manipulation.
Semantic Intelligence: Integrating GPT-4 with A Planning in Low-Cost Robotics
May 03, 2025Classical robot navigation often relies on hardcoded state machines and purely geometric path planners, limiting a robot's ability to interpret high-level semantic instructions. In this paper, we first assess GPT-4's ability to act as a path planner compared to the A* algorithm, then present a hybrid planning framework that integrates GPT-4's semantic reasoning with A* on a low-cost robot platform operating on ROS2 Humble. Our approach eliminates explicit finite state machine (FSM) coding by using prompt-based GPT-4 reasoning to handle task logic while maintaining the accurate paths computed by A*. The GPT-4 module provides semantic understanding of instructions and environmental cues (e.g., recognizing toxic obstacles or crowded areas to avoid, or understanding low-battery situations requiring alternate route selection), and dynamically adjusts the robot's occupancy grid via obstacle buffering to enforce semantic constraints. We demonstrate multi-step reasoning for sequential tasks, such as first navigating to a resource goal and then reaching a final destination safely. Experiments on a Petoi Bittle robot with an overhead camera and Raspberry Pi Zero 2W compare classical A* against GPT-4-assisted planning. Results show that while A* is faster and more accurate for basic route generation and obstacle avoidance, the GPT-4-integrated system achieves high success rates (96-100%) on semantic tasks that are infeasible for pure geometric planners. This work highlights how affordable robots can exhibit intelligent, context-aware behaviors by leveraging large language model reasoning with minimal hardware and no fine-tuning.
PLATO: Planning with LLMs and Affordances for Tool Manipulation
Sep 17, 2024As robotic systems become increasingly integrated into complex real-world environments, there is a growing need for approaches that enable robots to understand and act upon natural language instructions without relying on extensive pre-programmed knowledge of their surroundings. This paper presents PLATO, an innovative system that addresses this challenge by leveraging specialized large language model agents to process natural language inputs, understand the environment, predict tool affordances, and generate executable actions for robotic systems. Unlike traditional systems that depend on hard-coded environmental information, PLATO employs a modular architecture of specialized agents to operate without any initial knowledge of the environment. These agents identify objects and their locations within the scene, generate a comprehensive high-level plan, translate this plan into a series of low-level actions, and verify the completion of each step. The system is particularly tested on challenging tool-use tasks, which involve handling diverse objects and require long-horizon planning. PLATO's design allows it to adapt to dynamic and unstructured settings, significantly enhancing its flexibility and robustness. By evaluating the system across various complex scenarios, we demonstrate its capability to tackle a diverse range of tasks and offer a novel solution to integrate LLMs with robotic platforms, advancing the state-of-the-art in autonomous robotic task execution. For videos and prompt details, please see our project website: https://sites.google.com/andrew.cmu.edu/plato
Low Fidelity Visuo-Tactile Pretraining Improves Vision-Only Manipulation Performance
Jun 25, 2024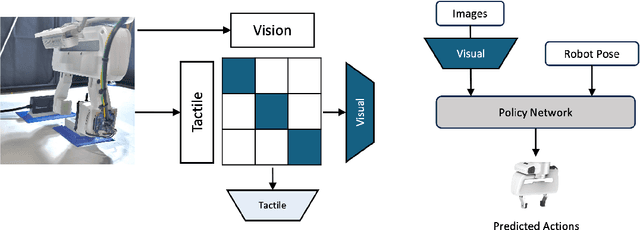
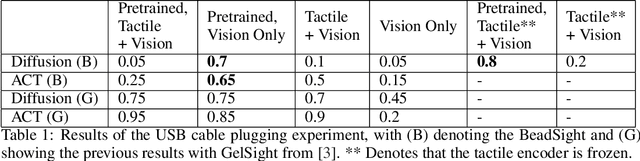
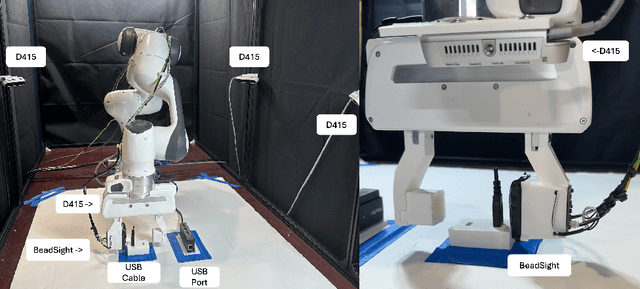
Tactile perception is a critical component of solving real-world manipulation tasks, but tactile sensors for manipulation have barriers to use such as fragility and cost. In this work, we engage a robust, low-cost tactile sensor, BeadSight, as an alternative to precise pre-calibrated sensors for a pretraining approach to manipulation. We show that tactile pretraining, even with a low-fidelity sensor as BeadSight, can improve an imitation learning agent's performance on complex manipulation tasks. We demonstrate this method against a baseline USB cable plugging task, previously achieved with a much higher precision GelSight sensor as the tactile input to pretraining. Our best BeadSight pretrained visuo-tactile agent completed the task with 70\% accuracy compared to 85\% for the best GelSight pretrained visuo-tactile agent, with vision-only inference for both.
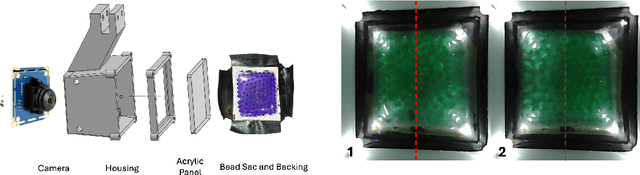
BeadSight: An Inexpensive Tactile Sensor Using Hydro-Gel Beads
May 21, 2024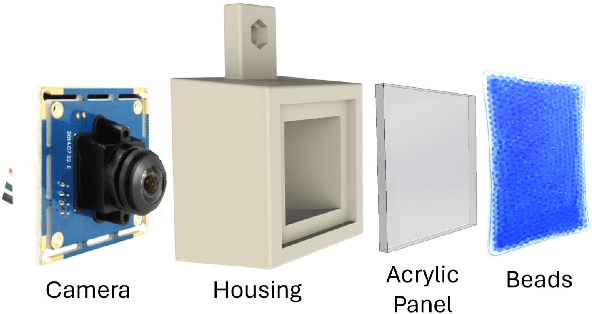
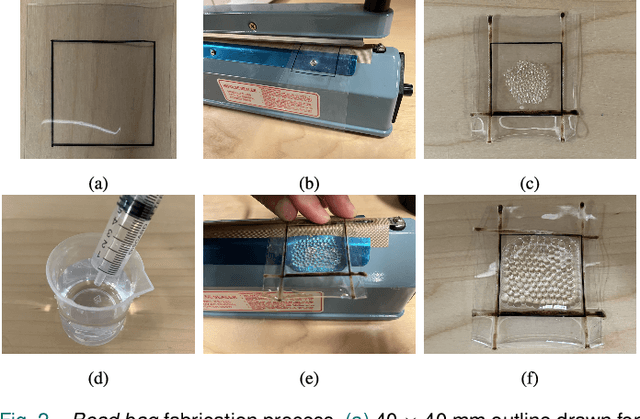
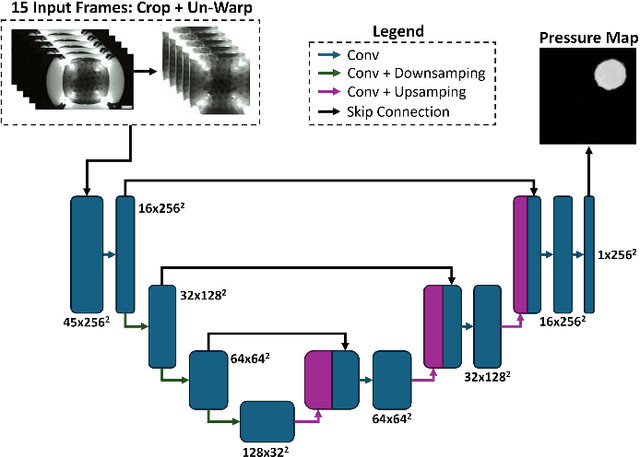
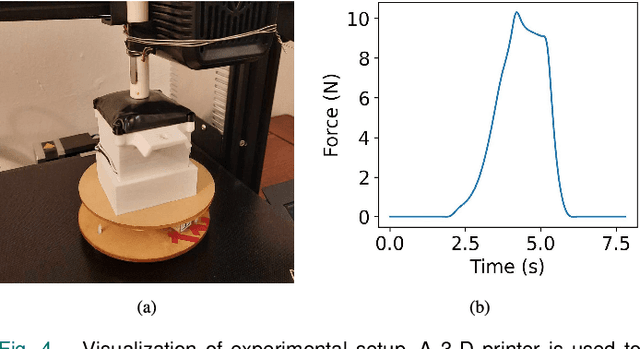
In robotic manipulation, tactile sensors are indispensable, especially when dealing with soft objects, objects of varying dimensions, or those out of the robot's direct line of sight. Traditional tactile sensors often grapple with challenges related to cost and durability. To address these issues, our study introduces a novel approach to visuo-tactile sensing with an emphasis on economy and replacablity. Our proposed sensor, BeadSight, uses hydro-gel beads encased in a vinyl bag as an economical, easily replaceable sensing medium. When the sensor makes contact with a surface, the deformation of the hydrogel beads is observed using a rear camera. This observation is then passed through a U-net Neural Network to predict the forces acting on the surface of the bead bag, in the form of a pressure map. Our results show that the sensor can accurately predict these pressure maps, detecting the location and magnitude of forces applied to the surface. These abilities make BeadSight an effective, inexpensive, and easily replaceable tactile sensor, ideal for many robotics applications.
Visuo-Tactile Pretraining for Cable Plugging
Mar 18, 2024Tactile information is a critical tool for fine-grain manipulation. As humans, we rely heavily on tactile information to understand objects in our environments and how to interact with them. We use touch not only to perform manipulation tasks but also to learn how to perform these tasks. Therefore, to create robotic agents that can learn to complete manipulation tasks at a human or super-human level of performance, we need to properly incorporate tactile information into both skill execution and skill learning. In this paper, we investigate how we can incorporate tactile information into imitation learning platforms to improve performance on complex tasks. To do this, we tackle the challenge of plugging in a USB cable, a dexterous manipulation task that relies on fine-grain visuo-tactile serving. By incorporating tactile information into imitation learning frameworks, we are able to train a robotic agent to plug in a USB cable - a first for imitation learning. Additionally, we explore how tactile information can be used to train non-tactile agents through a contrastive-loss pretraining process. Our results show that by pretraining with tactile information, the performance of a non-tactile agent can be significantly improved, reaching a level on par with visuo-tactile agents. For demonstration videos and access to our codebase, see the project website: https://sites.google.com/andrew.cmu.edu/visuo-tactile-cable-plugging/home
Pour me a drink: Robotic Precision Pouring Carbonated Beverages into Transparent Containers
Sep 19, 2023With the growing emphasis on the development and integration of service robots within household environments, we will need to endow robots with the ability to reliably pour a variety of liquids. However, liquid handling and pouring is a challenging task due to the complex dynamics and varying properties of different liquids, the exacting precision required to prevent spills and ensure accurate pouring, and the necessity for robots to adapt seamlessly to a multitude of containers in real-world scenarios. In response to these challenges, we propose a novel autonomous robotics pipeline that empowers robots to execute precision pouring tasks, encompassing both carbonated and non-carbonated liquids, as well as opaque and transparent liquids, into a variety of transparent containers. Our proposed approach maximizes the potential of RGB input alone, achieving zero-shot capability by harnessing existing pre-trained vision segmentation models. This eliminates the need for additional data collection, manual image annotations, or extensive training. Furthermore, our work integrates ChatGPT, facilitating seamless interaction between individuals without prior expertise in robotics and our pouring pipeline, this integration enables users to effortlessly request and execute pouring actions. Our experiments demonstrate the pipeline's capability to successfully pour a diverse range of carbonated and non-carbonated beverages into containers of varying sizes, relying solely on visual input.
One ACT Play: Single Demonstration Behavior Cloning with Action Chunking Transformers
Sep 18, 2023Learning from human demonstrations (behavior cloning) is a cornerstone of robot learning. However, most behavior cloning algorithms require a large number of demonstrations to learn a task, especially for general tasks that have a large variety of initial conditions. Humans, however, can learn to complete tasks, even complex ones, after only seeing one or two demonstrations. Our work seeks to emulate this ability, using behavior cloning to learn a task given only a single human demonstration. We achieve this goal by using linear transforms to augment the single demonstration, generating a set of trajectories for a wide range of initial conditions. With these demonstrations, we are able to train a behavior cloning agent to successfully complete three block manipulation tasks. Additionally, we developed a novel addition to the temporal ensembling method used by action chunking agents during inference. By incorporating the standard deviation of the action predictions into the ensembling method, our approach is more robust to unforeseen changes in the environment, resulting in significant performance improvements.
Fluid Property Prediction Leveraging AI and Robotics
Aug 04, 2023Inferring liquid properties from vision is a challenging task due to the complex nature of fluids, both in behavior and detection. Nevertheless, the ability to infer their properties directly from visual information is highly valuable for autonomous fluid handling systems, as cameras are readily available. Moreover, predicting fluid properties purely from vision can accelerate the process of fluid characterization saving considerable time and effort in various experimental environments. In this work, we present a purely vision-based approach to estimate viscosity, leveraging the fact that the behavior of the fluid oscillations is directly related to the viscosity. Specifically, we utilize a 3D convolutional autoencoder to learn latent representations of different fluid-oscillating patterns present in videos. We leverage this latent representation to visually infer the category of fluid or the dynamics viscosity of fluid from video.
RoboChop: Autonomous Framework for Fruit and Vegetable Chopping Leveraging Foundational Models
Jul 24, 2023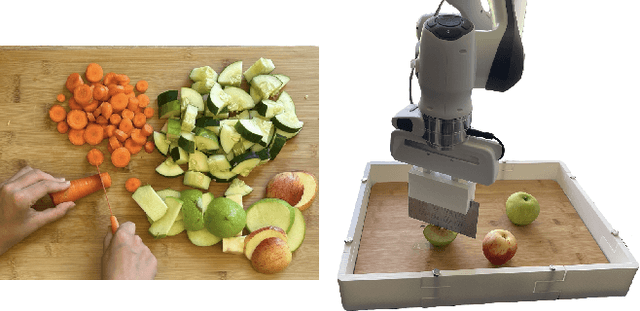
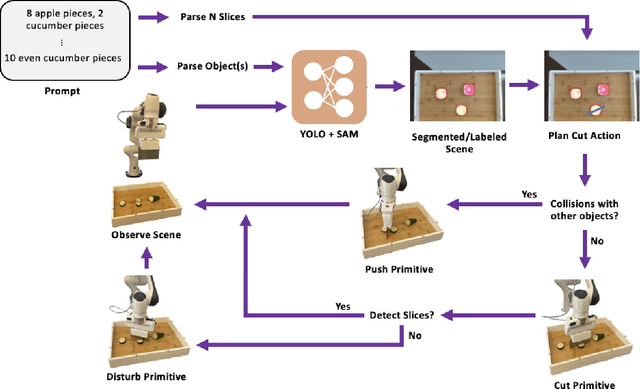
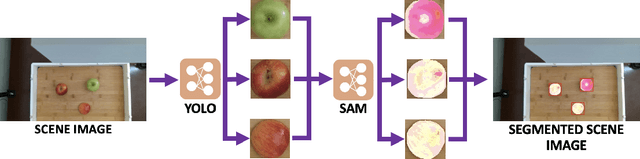
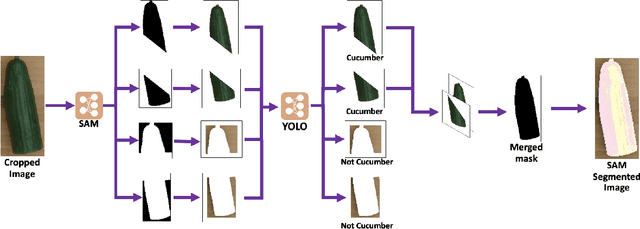
With the goal of developing fully autonomous cooking robots, developing robust systems that can chop a wide variety of objects is important. Existing approaches focus primarily on the low-level dynamics of the cutting action, which overlooks some of the practical real-world challenges of implementing autonomous cutting systems. In this work we propose an autonomous framework to sequence together action primitives for the purpose of chopping fruits and vegetables on a cluttered cutting board. We present a novel technique to leverage vision foundational models SAM and YOLO to accurately detect, segment, and track fruits and vegetables as they visually change through the sequences of chops, finetuning YOLO on a novel dataset of whole and chopped fruits and vegetables. In our experiments, we demonstrate that our simple pipeline is able to reliably chop a variety of fruits and vegetables ranging in size, appearance, and texture, meeting a variety of chopping specifications, including fruit type, number of slices, and types of slices.