 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePinchBot: Long-Horizon Deformable Manipulation with Guided Diffusion Policy
Jul 23, 2025
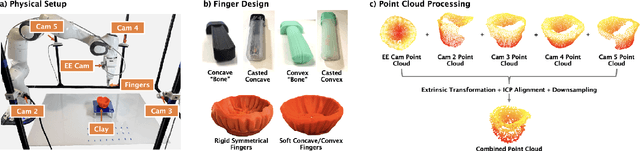


Pottery creation is a complicated art form that requires dexterous, precise and delicate actions to slowly morph a block of clay to a meaningful, and often useful 3D goal shape. In this work, we aim to create a robotic system that can create simple pottery goals with only pinch-based actions. This pinch pottery task allows us to explore the challenges of a highly multi-modal and long-horizon deformable manipulation task. To this end, we present PinchBot, a goal-conditioned diffusion policy model that when combined with pre-trained 3D point cloud embeddings, task progress prediction and collision-constrained action projection, is able to successfully create a variety of simple pottery goals. For experimental videos and access to the demonstration dataset, please visit our project website: https://sites.google.com/andrew.cmu.edu/pinchbot/home.
PLATO: Planning with LLMs and Affordances for Tool Manipulation
Sep 17, 2024



As robotic systems become increasingly integrated into complex real-world environments, there is a growing need for approaches that enable robots to understand and act upon natural language instructions without relying on extensive pre-programmed knowledge of their surroundings. This paper presents PLATO, an innovative system that addresses this challenge by leveraging specialized large language model agents to process natural language inputs, understand the environment, predict tool affordances, and generate executable actions for robotic systems. Unlike traditional systems that depend on hard-coded environmental information, PLATO employs a modular architecture of specialized agents to operate without any initial knowledge of the environment. These agents identify objects and their locations within the scene, generate a comprehensive high-level plan, translate this plan into a series of low-level actions, and verify the completion of each step. The system is particularly tested on challenging tool-use tasks, which involve handling diverse objects and require long-horizon planning. PLATO's design allows it to adapt to dynamic and unstructured settings, significantly enhancing its flexibility and robustness. By evaluating the system across various complex scenarios, we demonstrate its capability to tackle a diverse range of tasks and offer a novel solution to integrate LLMs with robotic platforms, advancing the state-of-the-art in autonomous robotic task execution. For videos and prompt details, please see our project website: https://sites.google.com/andrew.cmu.edu/plato
SculptDiff: Learning Robotic Clay Sculpting from Humans with Goal Conditioned Diffusion Policy
Mar 15, 2024Manipulating deformable objects remains a challenge within robotics due to the difficulties of state estimation, long-horizon planning, and predicting how the object will deform given an interaction. These challenges are the most pronounced with 3D deformable objects. We propose SculptDiff, a goal-conditioned diffusion-based imitation learning framework that works with point cloud state observations to directly learn clay sculpting policies for a variety of target shapes. To the best of our knowledge this is the first real-world method that successfully learns manipulation policies for 3D deformable objects. For sculpting videos and access to our dataset and hardware CAD models, see the project website: https://sites.google.com/andrew.cmu.edu/imitation-sculpting/home