 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePLATO: Planning with LLMs and Affordances for Tool Manipulation
Sep 17, 2024



As robotic systems become increasingly integrated into complex real-world environments, there is a growing need for approaches that enable robots to understand and act upon natural language instructions without relying on extensive pre-programmed knowledge of their surroundings. This paper presents PLATO, an innovative system that addresses this challenge by leveraging specialized large language model agents to process natural language inputs, understand the environment, predict tool affordances, and generate executable actions for robotic systems. Unlike traditional systems that depend on hard-coded environmental information, PLATO employs a modular architecture of specialized agents to operate without any initial knowledge of the environment. These agents identify objects and their locations within the scene, generate a comprehensive high-level plan, translate this plan into a series of low-level actions, and verify the completion of each step. The system is particularly tested on challenging tool-use tasks, which involve handling diverse objects and require long-horizon planning. PLATO's design allows it to adapt to dynamic and unstructured settings, significantly enhancing its flexibility and robustness. By evaluating the system across various complex scenarios, we demonstrate its capability to tackle a diverse range of tasks and offer a novel solution to integrate LLMs with robotic platforms, advancing the state-of-the-art in autonomous robotic task execution. For videos and prompt details, please see our project website: https://sites.google.com/andrew.cmu.edu/plato
Query2CAD: Generating CAD models using natural language queries
May 31, 2024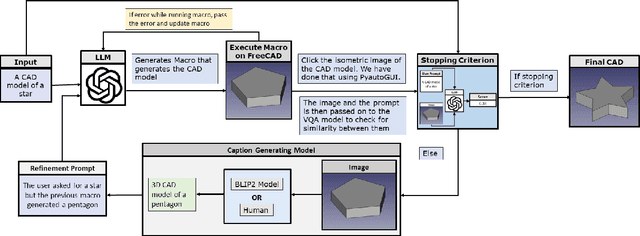



Computer Aided Design (CAD) engineers typically do not achieve their best prototypes in a single attempt. Instead, they iterate and refine their designs to achieve an optimal solution through multiple revisions. This traditional approach, though effective, is time-consuming and relies heavily on the expertise of skilled engineers. To address these challenges, we introduce Query2CAD, a novel framework to generate CAD designs. The framework uses a large language model to generate executable CAD macros. Additionally, Query2CAD refines the generation of the CAD model with the help of its self-refinement loops. Query2CAD operates without supervised data or additional training, using the LLM as both a generator and a refiner. The refiner leverages feedback generated by the BLIP2 model, and to address false negatives, we have incorporated human-in-the-loop feedback into our system. Additionally, we have developed a dataset that encompasses most operations used in CAD model designing and have evaluated our framework using this dataset. Our findings reveal that when we used GPT-4 Turbo as our language model, the architecture achieved a success rate of 53.6\% on the first attempt. With subsequent refinements, the success rate increased by 23.1\%. In particular, the most significant improvement in the success rate was observed with the first iteration of the refinement. With subsequent refinements, the accuracy of the correct designs did not improve significantly. We have open-sourced our data, model, and code (github.com/akshay140601/Query2CAD).