 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplication of 2D Homography for High Resolution Traffic Data Collection using CCTV Cameras
Jan 14, 2024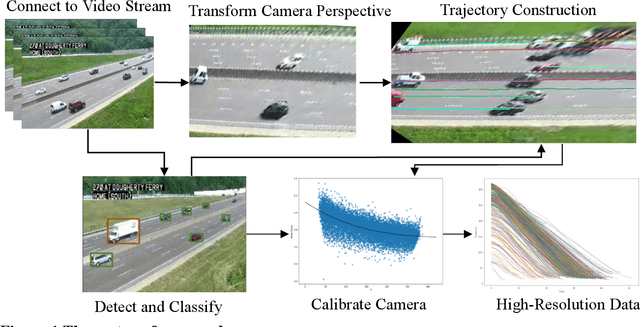
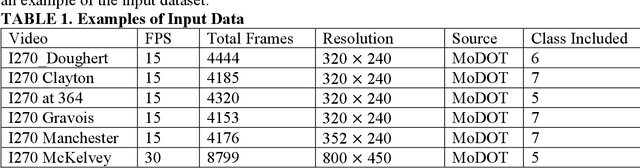
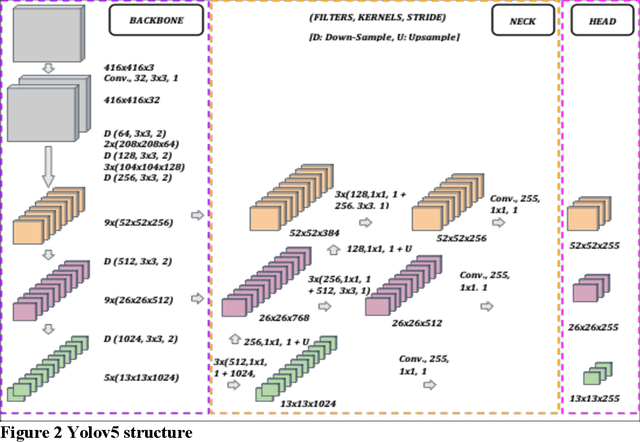
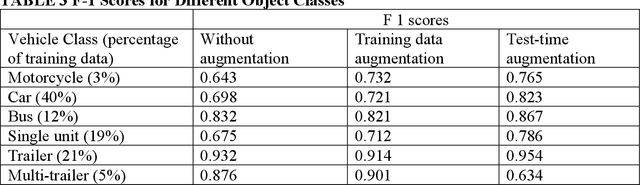
Traffic cameras remain the primary source data for surveillance activities such as congestion and incident monitoring. To date, State agencies continue to rely on manual effort to extract data from networked cameras due to limitations of the current automatic vision systems including requirements for complex camera calibration and inability to generate high resolution data. This study implements a three-stage video analytics framework for extracting high-resolution traffic data such vehicle counts, speed, and acceleration from infrastructure-mounted CCTV cameras. The key components of the framework include object recognition, perspective transformation, and vehicle trajectory reconstruction for traffic data collection. First, a state-of-the-art vehicle recognition model is implemented to detect and classify vehicles. Next, to correct for camera distortion and reduce partial occlusion, an algorithm inspired by two-point linear perspective is utilized to extracts the region of interest (ROI) automatically, while a 2D homography technique transforms the CCTV view to bird's-eye view (BEV). Cameras are calibrated with a two-layer matrix system to enable the extraction of speed and acceleration by converting image coordinates to real-world measurements. Individual vehicle trajectories are constructed and compared in BEV using two time-space-feature-based object trackers, namely Motpy and BYTETrack. The results of the current study showed about +/- 4.5% error rate for directional traffic counts, less than 10% MSE for speed bias between camera estimates in comparison to estimates from probe data sources. Extracting high-resolution data from traffic cameras has several implications, ranging from improvements in traffic management and identify dangerous driving behavior, high-risk areas for accidents, and other safety concerns, enabling proactive measures to reduce accidents and fatalities.
Image2PCI -- A Multitask Learning Framework for Estimating Pavement Condition Indices Directly from Images
Oct 12, 2023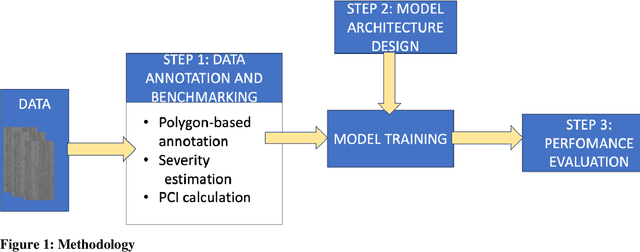
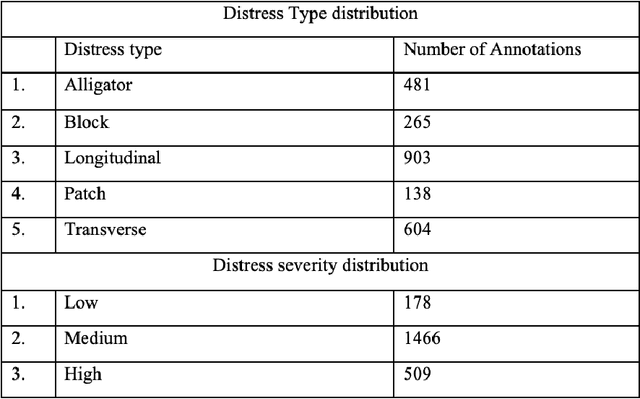
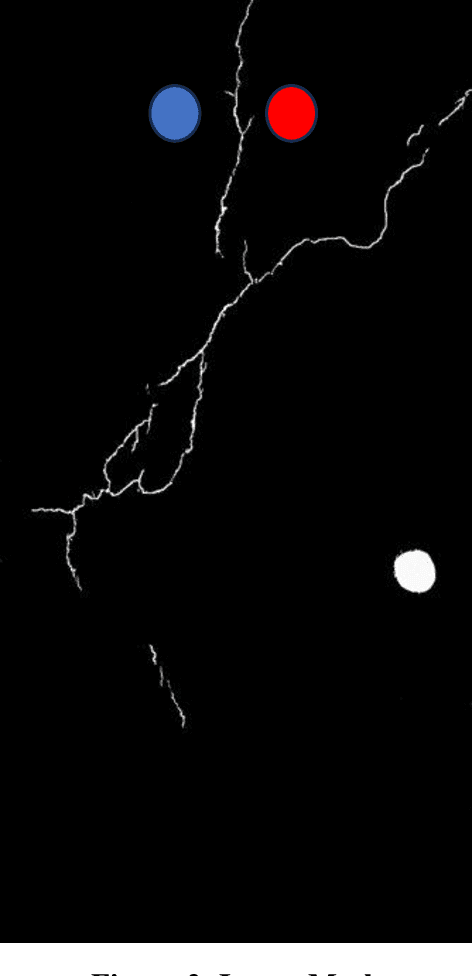
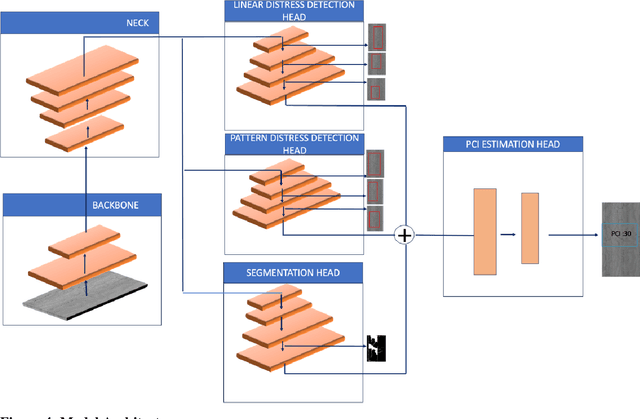
The Pavement Condition Index (PCI) is a widely used metric for evaluating pavement performance based on the type, extent and severity of distresses detected on a pavement surface. In recent times, significant progress has been made in utilizing deep-learning approaches to automate PCI estimation process. However, the current approaches rely on at least two separate models to estimate PCI values -- one model dedicated to determining the type and extent and another for estimating their severity. This approach presents several challenges, including complexities, high computational resource demands, and maintenance burdens that necessitate careful consideration and resolution. To overcome these challenges, the current study develops a unified multi-tasking model that predicts the PCI directly from a top-down pavement image. The proposed architecture is a multi-task model composed of one encoder for feature extraction and four decoders to handle specific tasks: two detection heads, one segmentation head and one PCI estimation head. By multitasking, we are able to extract features from the detection and segmentation heads for automatically estimating the PCI directly from the images. The model performs very well on our benchmarked and open pavement distress dataset that is annotated for multitask learning (the first of its kind). To our best knowledge, this is the first work that can estimate PCI directly from an image at real time speeds while maintaining excellent accuracy on all related tasks for crack detection and segmentation.
Edge Computing-Enabled Road Condition Monitoring: System Development and Evaluation
Oct 09, 2023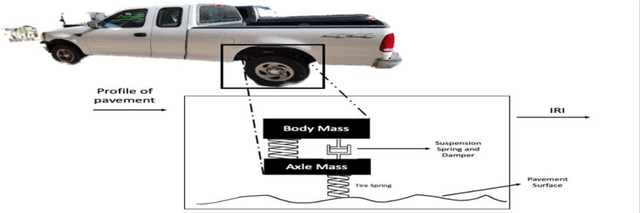
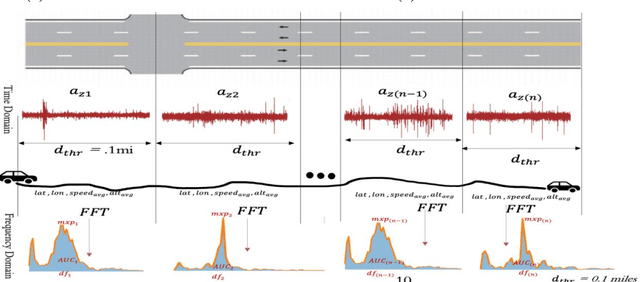
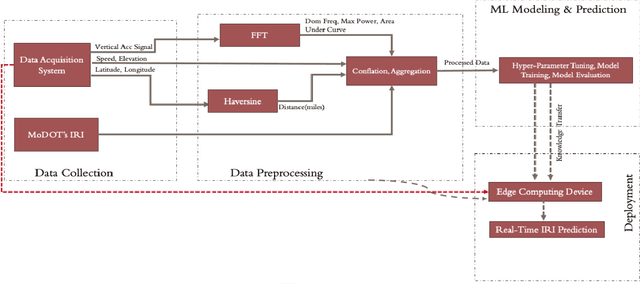
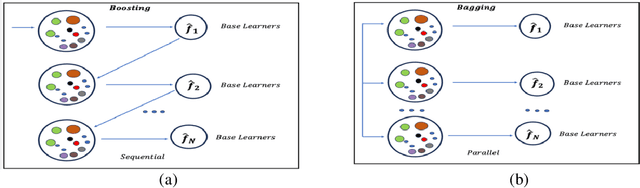
Real-time pavement condition monitoring provides highway agencies with timely and accurate information that could form the basis of pavement maintenance and rehabilitation policies. Existing technologies rely heavily on manual data processing, are expensive and therefore, difficult to scale for frequent, networklevel pavement condition monitoring. Additionally, these systems require sending large packets of data to the cloud which requires large storage space, are computationally expensive to process, and results in high latency. The current study proposes a solution that capitalizes on the widespread availability of affordable Micro Electro-Mechanical System (MEMS) sensors, edge computing and internet connection capabilities of microcontrollers, and deployable machine learning (ML) models to (a) design an Internet of Things (IoT)-enabled device that can be mounted on axles of vehicles to stream live pavement condition data (b) reduce latency through on-device processing and analytics of pavement condition sensor data before sending to the cloud servers. In this study, three ML models including Random Forest, LightGBM and XGBoost were trained to predict International Roughness Index (IRI) at every 0.1-mile segment. XGBoost had the highest accuracy with an RMSE and MAPE of 16.89in/mi and 20.3%, respectively. In terms of the ability to classify the IRI of pavement segments based on ride quality according to MAP-21 criteria, our proposed device achieved an average accuracy of 96.76% on I-70EB and 63.15% on South Providence. Overall, our proposed device demonstrates significant potential in providing real-time pavement condition data to State Highway Agencies (SHA) and Department of Transportation (DOTs) with a satisfactory level of accuracy.
GC-GRU-N for Traffic Prediction using Loop Detector Data
Nov 13, 2022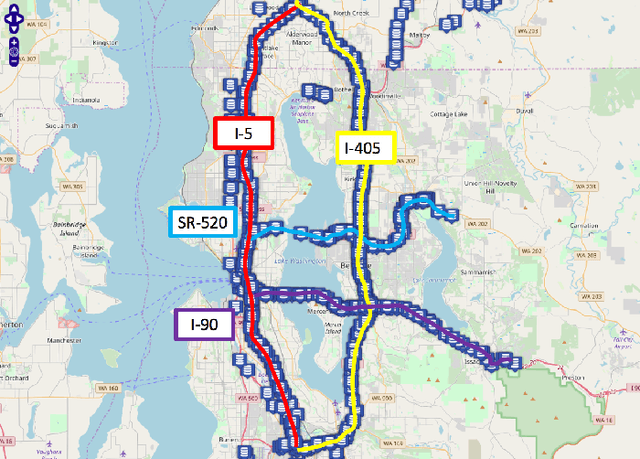

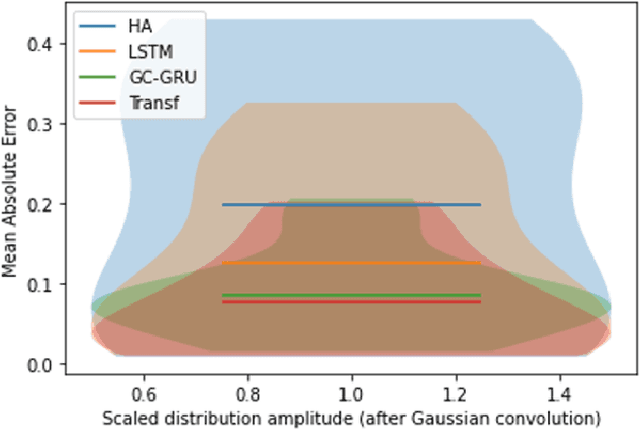
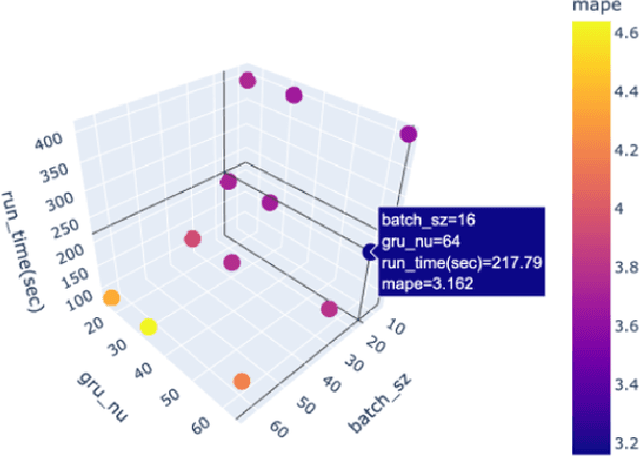
Because traffic characteristics display stochastic nonlinear spatiotemporal dependencies, traffic prediction is a challenging task. In this paper develop a graph convolution gated recurrent unit (GC GRU N) network to extract the essential Spatio temporal features. we use Seattle loop detector data aggregated over 15 minutes and reframe the problem through space and time. The model performance is compared o benchmark models; Historical Average, Long Short Term Memory (LSTM), and Transformers. The proposed model ranked second with the fastest inference time and a very close performance to first place (Transformers). Our model also achieves a running time that is six times faster than transformers. Finally, we present a comparative study of our model and the available benchmarks using metrics such as training time, inference time, MAPE, MAE and RMSE. Spatial and temporal aspects are also analyzed for each of the trained models.
A Region-Based Deep Learning Approach to Automated Retail Checkout
Apr 18, 2022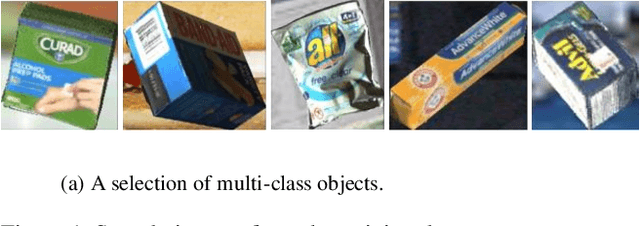
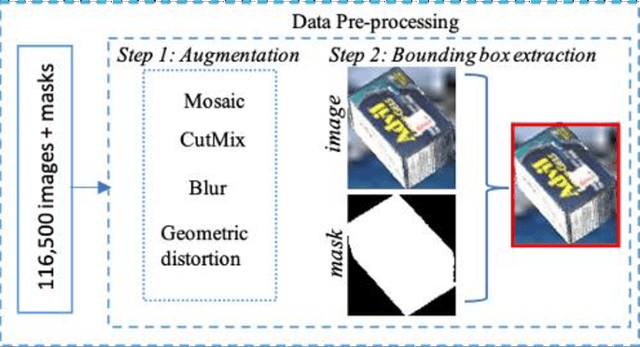
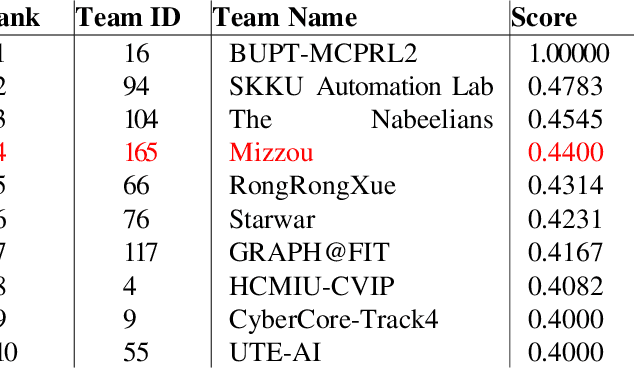
Automating the product checkout process at conventional retail stores is a task poised to have large impacts on society generally speaking. Towards this end, reliable deep learning models that enable automated product counting for fast customer checkout can make this goal a reality. In this work, we propose a novel, region-based deep learning approach to automate product counting using a customized YOLOv5 object detection pipeline and the DeepSORT algorithm. Our results on challenging, real-world test videos demonstrate that our method can generalize its predictions to a sufficient level of accuracy and with a fast enough runtime to warrant deployment to real-world commercial settings. Our proposed method won 4th place in the 2022 AI City Challenge, Track 4, with an F1 score of 0.4400 on experimental validation data.