 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplication of 2D Homography for High Resolution Traffic Data Collection using CCTV Cameras
Paper and Code
Jan 14, 2024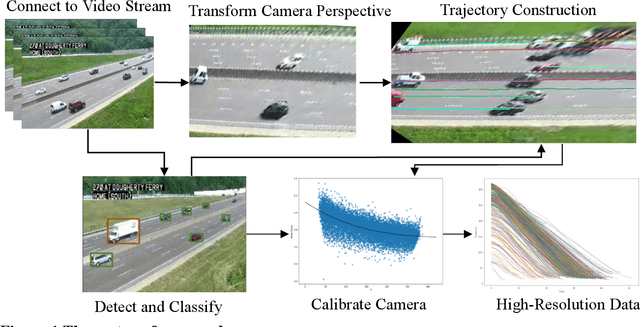
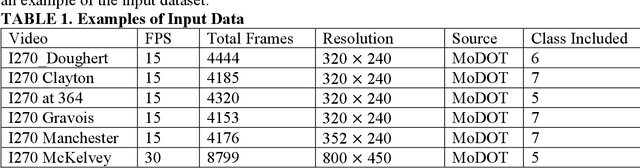
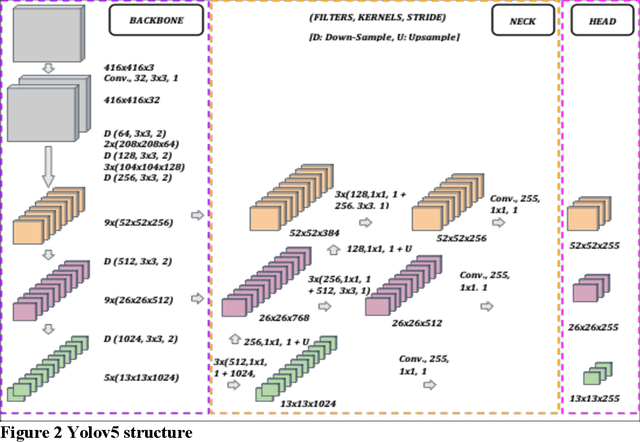
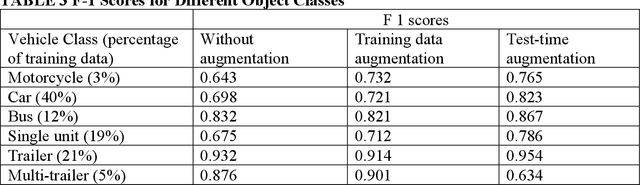
Traffic cameras remain the primary source data for surveillance activities such as congestion and incident monitoring. To date, State agencies continue to rely on manual effort to extract data from networked cameras due to limitations of the current automatic vision systems including requirements for complex camera calibration and inability to generate high resolution data. This study implements a three-stage video analytics framework for extracting high-resolution traffic data such vehicle counts, speed, and acceleration from infrastructure-mounted CCTV cameras. The key components of the framework include object recognition, perspective transformation, and vehicle trajectory reconstruction for traffic data collection. First, a state-of-the-art vehicle recognition model is implemented to detect and classify vehicles. Next, to correct for camera distortion and reduce partial occlusion, an algorithm inspired by two-point linear perspective is utilized to extracts the region of interest (ROI) automatically, while a 2D homography technique transforms the CCTV view to bird's-eye view (BEV). Cameras are calibrated with a two-layer matrix system to enable the extraction of speed and acceleration by converting image coordinates to real-world measurements. Individual vehicle trajectories are constructed and compared in BEV using two time-space-feature-based object trackers, namely Motpy and BYTETrack. The results of the current study showed about +/- 4.5% error rate for directional traffic counts, less than 10% MSE for speed bias between camera estimates in comparison to estimates from probe data sources. Extracting high-resolution data from traffic cameras has several implications, ranging from improvements in traffic management and identify dangerous driving behavior, high-risk areas for accidents, and other safety concerns, enabling proactive measures to reduce accidents and fatalities.