 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePaveSAM Segment Anything for Pavement Distress
Sep 11, 2024
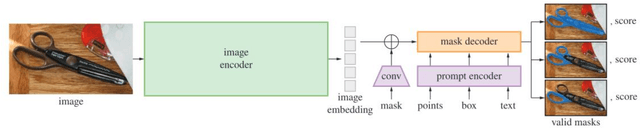
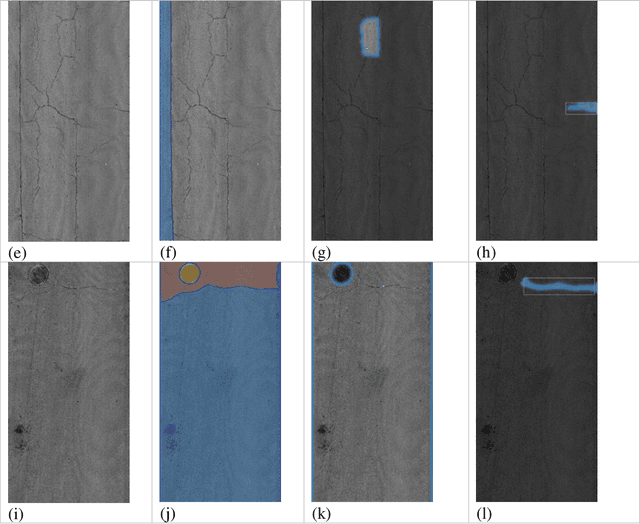
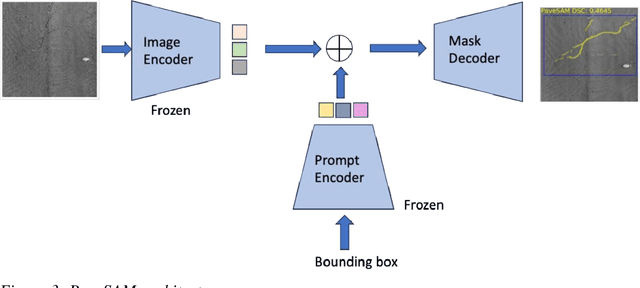
Automated pavement monitoring using computer vision can analyze pavement conditions more efficiently and accurately than manual methods. Accurate segmentation is essential for quantifying the severity and extent of pavement defects and consequently, the overall condition index used for prioritizing rehabilitation and maintenance activities. Deep learning-based segmentation models are however, often supervised and require pixel-level annotations, which can be costly and time-consuming. While the recent evolution of zero-shot segmentation models can generate pixel-wise labels for unseen classes without any training data, they struggle with irregularities of cracks and textured pavement backgrounds. This research proposes a zero-shot segmentation model, PaveSAM, that can segment pavement distresses using bounding box prompts. By retraining SAM's mask decoder with just 180 images, pavement distress segmentation is revolutionized, enabling efficient distress segmentation using bounding box prompts, a capability not found in current segmentation models. This not only drastically reduces labeling efforts and costs but also showcases our model's high performance with minimal input, establishing the pioneering use of SAM in pavement distress segmentation. Furthermore, researchers can use existing open-source pavement distress images annotated with bounding boxes to create segmentation masks, which increases the availability and diversity of segmentation pavement distress datasets.
Image2PCI -- A Multitask Learning Framework for Estimating Pavement Condition Indices Directly from Images
Oct 12, 2023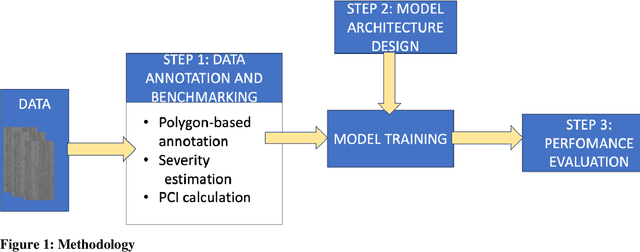
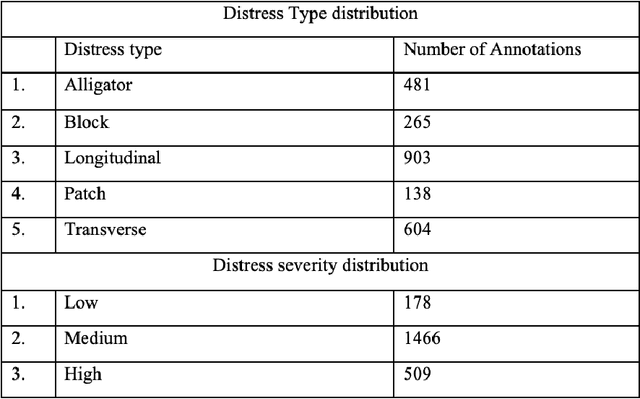
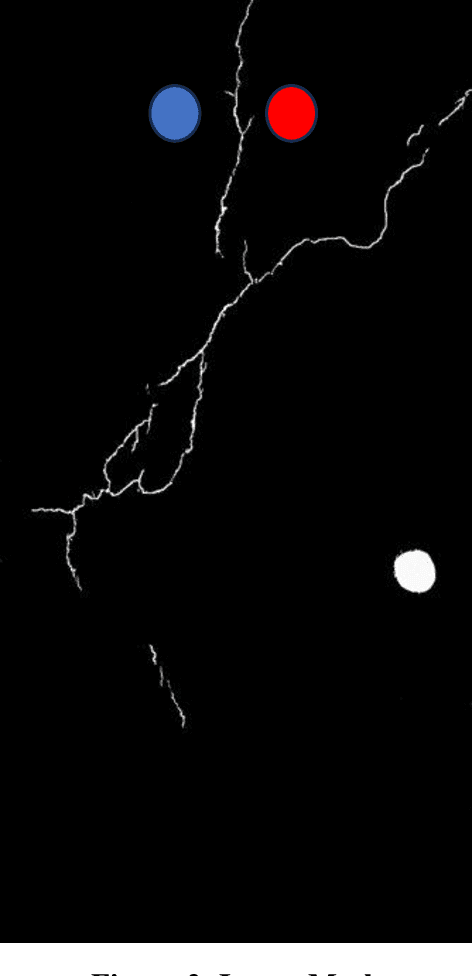
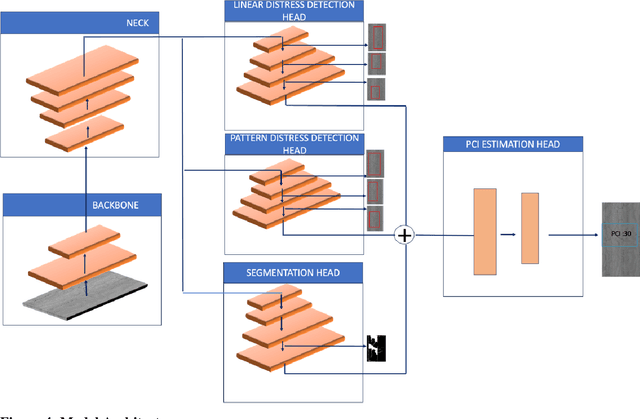
The Pavement Condition Index (PCI) is a widely used metric for evaluating pavement performance based on the type, extent and severity of distresses detected on a pavement surface. In recent times, significant progress has been made in utilizing deep-learning approaches to automate PCI estimation process. However, the current approaches rely on at least two separate models to estimate PCI values -- one model dedicated to determining the type and extent and another for estimating their severity. This approach presents several challenges, including complexities, high computational resource demands, and maintenance burdens that necessitate careful consideration and resolution. To overcome these challenges, the current study develops a unified multi-tasking model that predicts the PCI directly from a top-down pavement image. The proposed architecture is a multi-task model composed of one encoder for feature extraction and four decoders to handle specific tasks: two detection heads, one segmentation head and one PCI estimation head. By multitasking, we are able to extract features from the detection and segmentation heads for automatically estimating the PCI directly from the images. The model performs very well on our benchmarked and open pavement distress dataset that is annotated for multitask learning (the first of its kind). To our best knowledge, this is the first work that can estimate PCI directly from an image at real time speeds while maintaining excellent accuracy on all related tasks for crack detection and segmentation.
Edge Computing-Enabled Road Condition Monitoring: System Development and Evaluation
Oct 09, 2023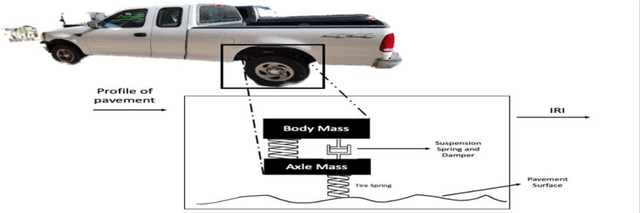
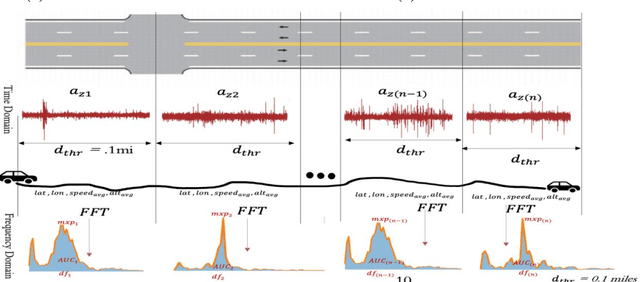
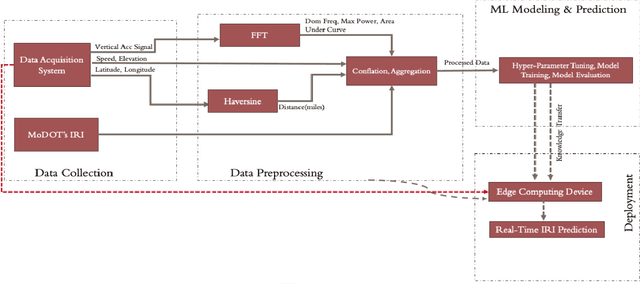
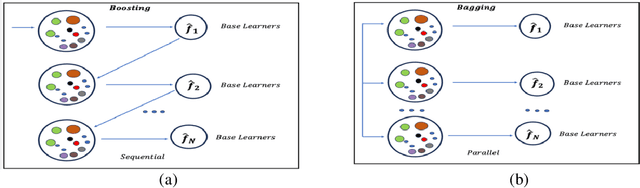
Real-time pavement condition monitoring provides highway agencies with timely and accurate information that could form the basis of pavement maintenance and rehabilitation policies. Existing technologies rely heavily on manual data processing, are expensive and therefore, difficult to scale for frequent, networklevel pavement condition monitoring. Additionally, these systems require sending large packets of data to the cloud which requires large storage space, are computationally expensive to process, and results in high latency. The current study proposes a solution that capitalizes on the widespread availability of affordable Micro Electro-Mechanical System (MEMS) sensors, edge computing and internet connection capabilities of microcontrollers, and deployable machine learning (ML) models to (a) design an Internet of Things (IoT)-enabled device that can be mounted on axles of vehicles to stream live pavement condition data (b) reduce latency through on-device processing and analytics of pavement condition sensor data before sending to the cloud servers. In this study, three ML models including Random Forest, LightGBM and XGBoost were trained to predict International Roughness Index (IRI) at every 0.1-mile segment. XGBoost had the highest accuracy with an RMSE and MAPE of 16.89in/mi and 20.3%, respectively. In terms of the ability to classify the IRI of pavement segments based on ride quality according to MAP-21 criteria, our proposed device achieved an average accuracy of 96.76% on I-70EB and 63.15% on South Providence. Overall, our proposed device demonstrates significant potential in providing real-time pavement condition data to State Highway Agencies (SHA) and Department of Transportation (DOTs) with a satisfactory level of accuracy.
DeepSegmenter: Temporal Action Localization for Detecting Anomalies in Untrimmed Naturalistic Driving Videos
Apr 13, 2023



Identifying unusual driving behaviors exhibited by drivers during driving is essential for understanding driver behavior and the underlying causes of crashes. Previous studies have primarily approached this problem as a classification task, assuming that naturalistic driving videos come discretized. However, both activity segmentation and classification are required for this task due to the continuous nature of naturalistic driving videos. The current study therefore departs from conventional approaches and introduces a novel methodological framework, DeepSegmenter, that simultaneously performs activity segmentation and classification in a single framework. The proposed framework consists of four major modules namely Data Module, Activity Segmentation Module, Classification Module and Postprocessing Module. Our proposed method won 8th place in the 2023 AI City Challenge, Track 3, with an activity overlap score of 0.5426 on experimental validation data. The experimental results demonstrate the effectiveness, efficiency, and robustness of the proposed system.