 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Learning of Segment-Level Traffic Congestion Functions
May 09, 2024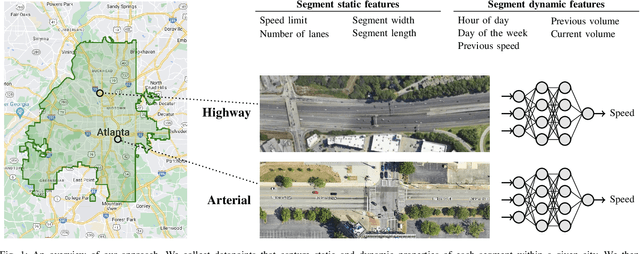
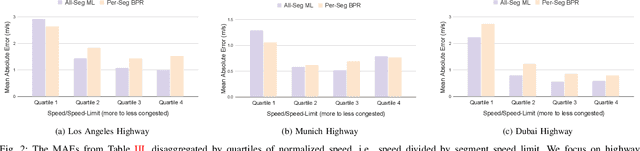
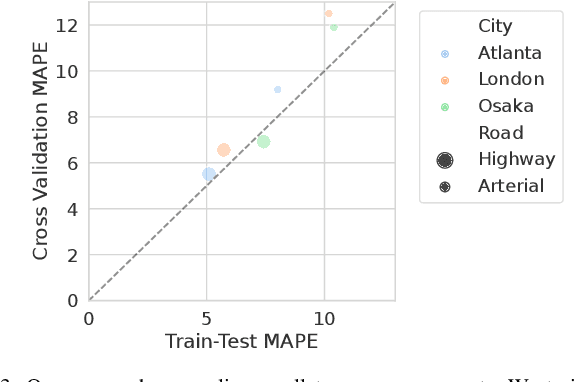
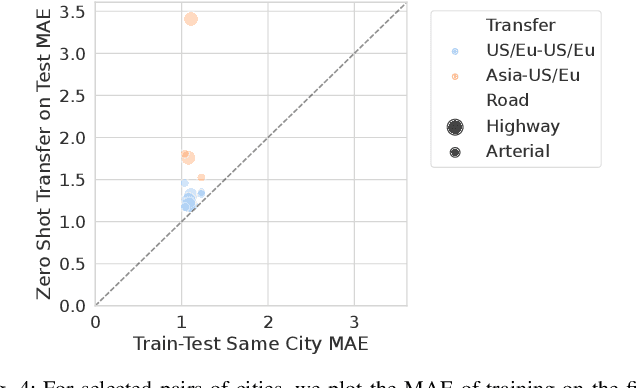
We propose and study a data-driven framework for identifying traffic congestion functions (numerical relationships between observations of macroscopic traffic variables) at global scale and segment-level granularity. In contrast to methods that estimate a separate set of parameters for each roadway, ours learns a single black-box function over all roadways in a metropolitan area. First, we pool traffic data from all segments into one dataset, combining static attributes with dynamic time-dependent features. Second, we train a feed-forward neural network on this dataset, which we can then use on any segment in the area. We evaluate how well our framework identifies congestion functions on observed segments and how it generalizes to unobserved segments and predicts segment attributes on a large dataset covering multiple cities worldwide. For identification error on observed segments, our single data-driven congestion function compares favorably to segment-specific model-based functions on highway roads, but has room to improve on arterial roads. For generalization, our approach shows strong performance across cities and road types: both on unobserved segments in the same city and on zero-shot transfer learning between cities. Finally, for predicting segment attributes, we find that our approach can approximate critical densities for individual segments using their static properties.
Unified Automatic Control of Vehicular Systems with Reinforcement Learning
Jul 30, 2022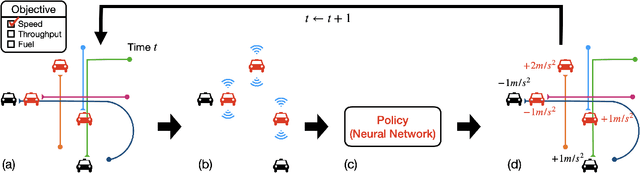
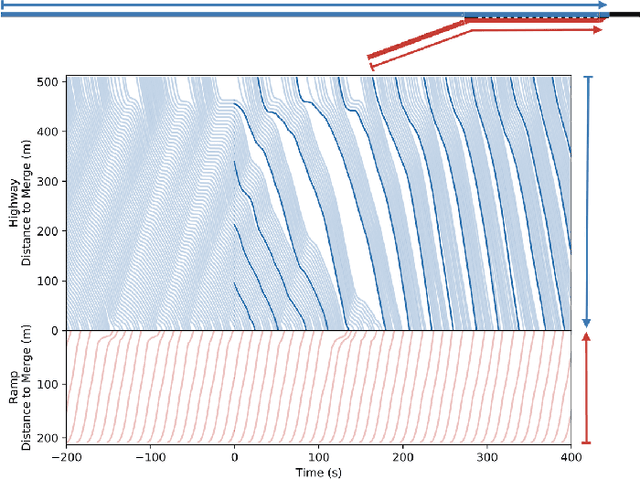
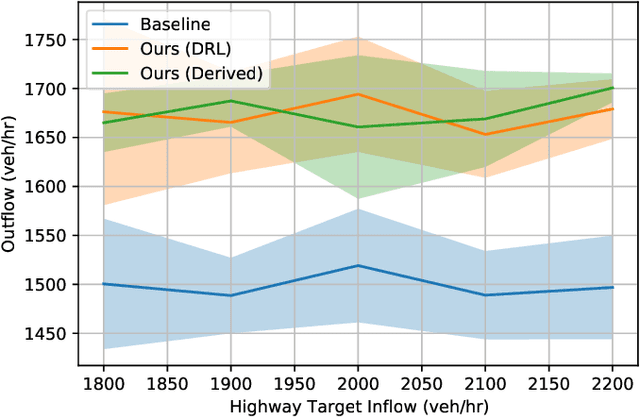
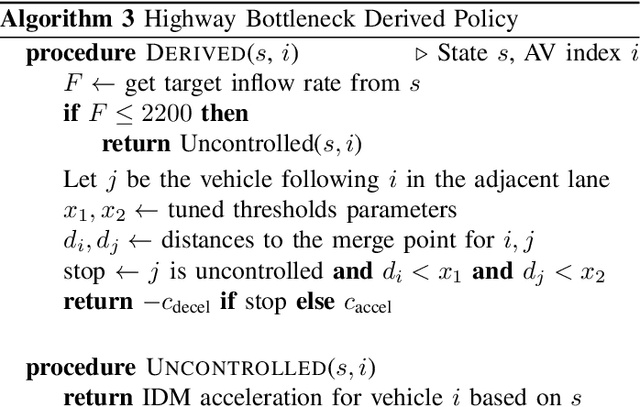
Emerging vehicular systems with increasing proportions of automated components present opportunities for optimal control to mitigate congestion and increase efficiency. There has been a recent interest in applying deep reinforcement learning (DRL) to these nonlinear dynamical systems for the automatic design of effective control strategies. Despite conceptual advantages of DRL being model-free, studies typically nonetheless rely on training setups that are painstakingly specialized to specific vehicular systems. This is a key challenge to efficient analysis of diverse vehicular and mobility systems. To this end, this article contributes a streamlined methodology for vehicular microsimulation and discovers high performance control strategies with minimal manual design. A variable-agent, multi-task approach is presented for optimization of vehicular Partially Observed Markov Decision Processes. The methodology is experimentally validated on mixed autonomy traffic systems, where fractions of vehicles are automated; empirical improvement, typically 15-60% over a human driving baseline, is observed in all configurations of six diverse open or closed traffic systems. The study reveals numerous emergent behaviors resembling wave mitigation, traffic signaling, and ramp metering. Finally, the emergent behaviors are analyzed to produce interpretable control strategies, which are validated against the learned control strategies.
Inter-Level Cooperation in Hierarchical Reinforcement Learning
Dec 05, 2019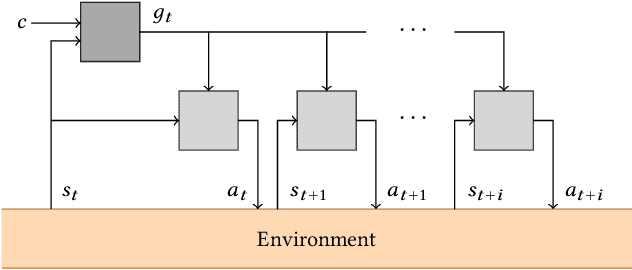
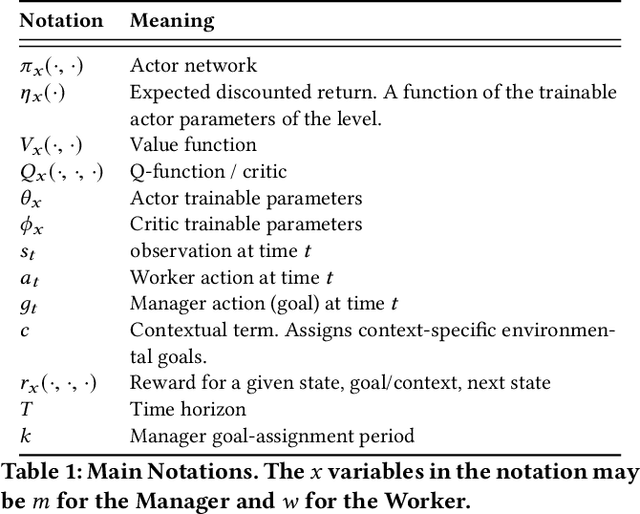


This article presents a novel algorithm for promoting cooperation between internal actors in a goal-conditioned hierarchical reinforcement learning (HRL) policy. Current techniques for HRL policy optimization treat the higher and lower level policies as separate entities which are trained to maximize different objective functions, rendering the HRL problem formulation more similar to a general sum game than a single-agent task. Within this setting, we hypothesize that improved cooperation between the internal agents of a hierarchy can simplify the credit assignment problem from the perspective of the high-level policies, thereby leading to significant improvements to training in situations where intricate sets of action primitives must be performed to yield improvements in performance. In order to promote cooperation within this setting, we propose the inclusion of a connected gradient term to the gradient computations of the higher level policies. Our method is demonstrated to achieve superior results to existing techniques in a set of difficult long time horizon tasks.