Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Limits and Potentials of Deep Learning for Robotics
Paper and Code
Apr 18, 2018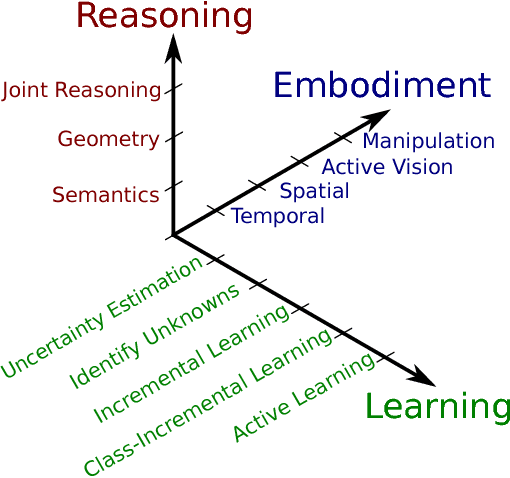
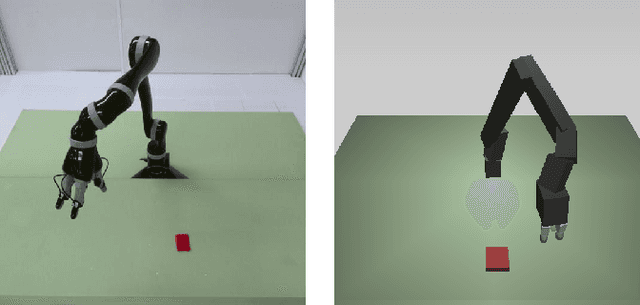
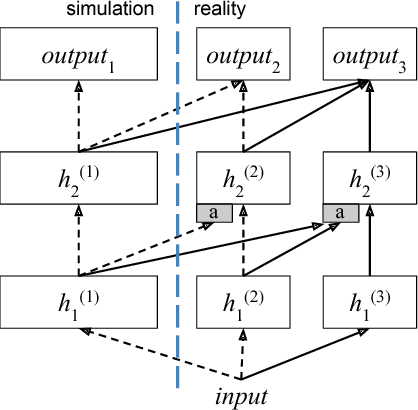

The application of deep learning in robotics leads to very specific problems and research questions that are typically not addressed by the computer vision and machine learning communities. In this paper we discuss a number of robotics-specific learning, reasoning, and embodiment challenges for deep learning. We explain the need for better evaluation metrics, highlight the importance and unique challenges for deep robotic learning in simulation, and explore the spectrum between purely data-driven and model-driven approaches. We hope this paper provides a motivating overview of important research directions to overcome the current limitations, and help fulfill the promising potentials of deep learning in robotics.
View paper on