 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantics for Robotic Mapping, Perception and Interaction: A Survey
Paper and Code
Jan 02, 2021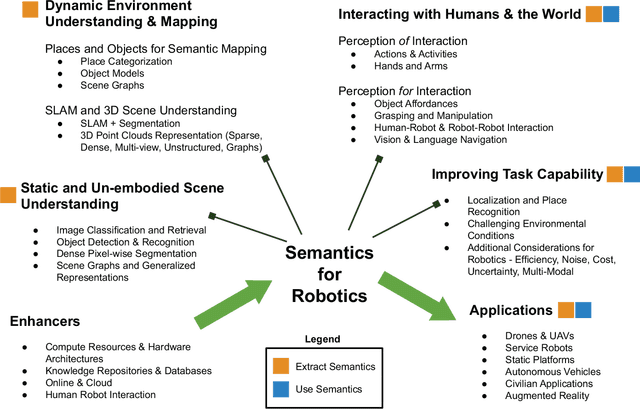
For robots to navigate and interact more richly with the world around them, they will likely require a deeper understanding of the world in which they operate. In robotics and related research fields, the study of understanding is often referred to as semantics, which dictates what does the world "mean" to a robot, and is strongly tied to the question of how to represent that meaning. With humans and robots increasingly operating in the same world, the prospects of human-robot interaction also bring semantics and ontology of natural language into the picture. Driven by need, as well as by enablers like increasing availability of training data and computational resources, semantics is a rapidly growing research area in robotics. The field has received significant attention in the research literature to date, but most reviews and surveys have focused on particular aspects of the topic: the technical research issues regarding its use in specific robotic topics like mapping or segmentation, or its relevance to one particular application domain like autonomous driving. A new treatment is therefore required, and is also timely because so much relevant research has occurred since many of the key surveys were published. This survey therefore provides an overarching snapshot of where semantics in robotics stands today. We establish a taxonomy for semantics research in or relevant to robotics, split into four broad categories of activity, in which semantics are extracted, used, or both. Within these broad categories we survey dozens of major topics including fundamentals from the computer vision field and key robotics research areas utilizing semantics, including mapping, navigation and interaction with the world. The survey also covers key practical considerations, including enablers like increased data availability and improved computational hardware, and major application areas where...