 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA novel tactile palm for robotic object manipulation
Aug 10, 2023Tactile sensing is of great importance during human hand usage such as object exploration, grasping and manipulation. Different types of tactile sensors have been designed during the past decades, which are mainly focused on either the fingertips for grasping or the upper-body for human-robot interaction. In this paper, a novel soft tactile sensor has been designed to mimic the functionality of human palm that can estimate the contact state of different objects. The tactile palm mainly consists of three parts including an electrode array, a soft cover skin and the conductive sponge. The design principle are described in details, with a number of experiments showcasing the effectiveness of the proposed design.
Learning Ultrasound Scanning Skills from Human Demonstrations
Nov 09, 2021Recently, the robotic ultrasound system has become an emerging topic owing to the widespread use of medical ultrasound. However, it is still a challenging task to model and to transfer the ultrasound skill from an ultrasound physician. In this paper, we propose a learning-based framework to acquire ultrasound scanning skills from human demonstrations. First, the ultrasound scanning skills are encapsulated into a high-dimensional multi-modal model in terms of interactions among ultrasound images, the probe pose and the contact force. The parameters of the model are learned using the data collected from skilled sonographers' demonstrations. Second, a sampling-based strategy is proposed with the learned model to adjust the extracorporeal ultrasound scanning process to guide a newbie sonographer or a robot arm. Finally, the robustness of the proposed framework is validated with the experiments on real data from sonographers.
Learning Friction Model for Magnet-actuated Tethered Capsule Robot
Oct 01, 2021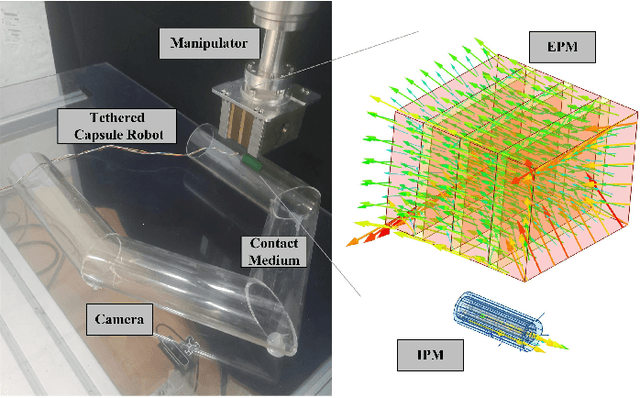
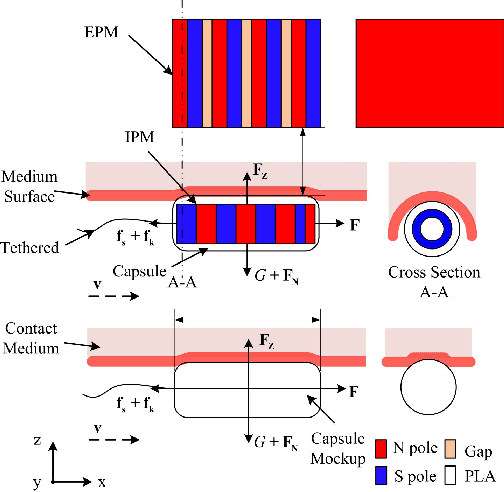
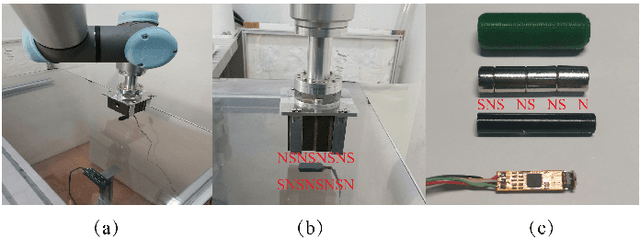
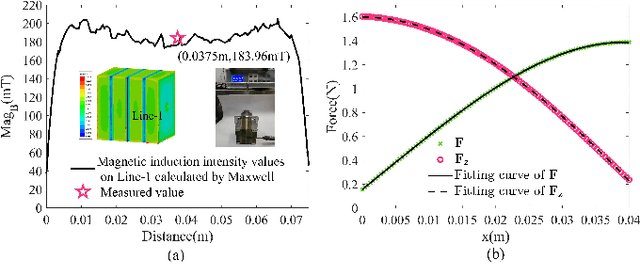
The potential diagnostic applications of magnet-actuated capsules have been greatly increased in recent years. For most of these potential applications, accurate position control of the capsule have been highly demanding. However, the friction between the robot and the environment as well as the drag force from the tether play a significant role during the motion control of the capsule. Moreover, these forces especially the friction force are typically hard to model beforehand. In this paper, we first designed a magnet-actuated tethered capsule robot, where the driving magnet is mounted on the end of a robotic arm. Then, we proposed a learning-based approach to model the friction force between the capsule and the environment, with the goal of increasing the control accuracy of the whole system. Finally, several real robot experiments are demonstrated to showcase the effectiveness of our proposed approach.
Learning Friction Model for Tethered Capsule Robot
Aug 16, 2021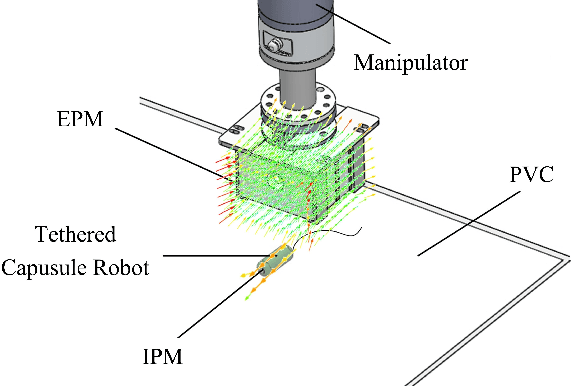
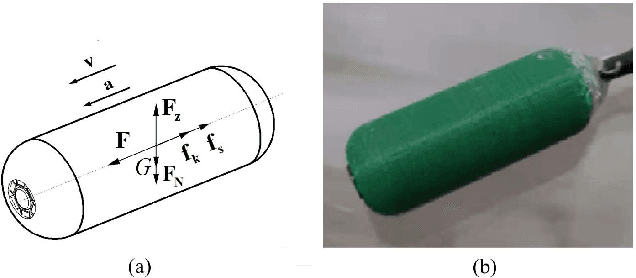
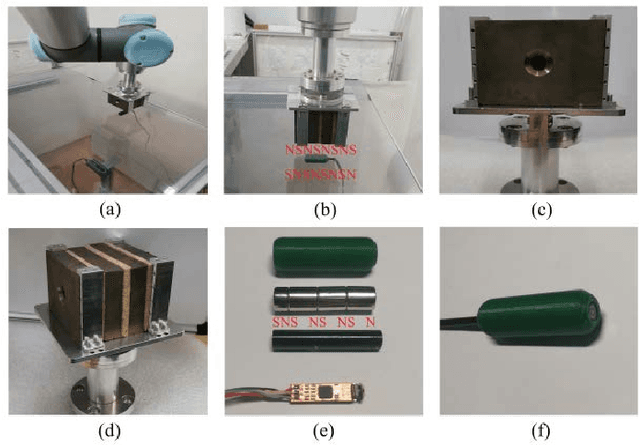
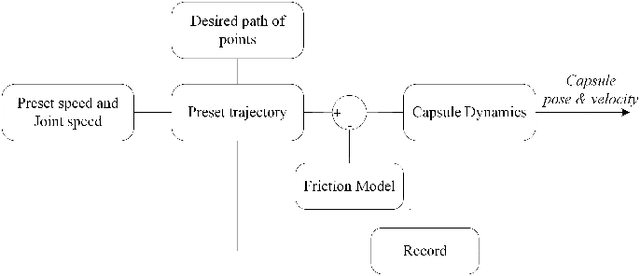
With the potential applications of capsule robots in medical endoscopy, accurate dynamic control of the capsule robot is becoming more and more important. In the scale of a capsule robot, the friction between capsule and the environment plays an essential role in the dynamic model, which is usually difficult to model beforehand. In the paper, a tethered capsule robot system driven by a robot manipulator is built, where a strong magnetic Halbach array is mounted on the robot's end-effector to adjust the state of the capsule. To increase the control accuracy, the friction between capsule and the environment is learned with demonstrated trajectories. With the learned friction model, experimental results demonstrate an improvement of 5.6% in terms of tracking error.