 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA novel tactile palm for robotic object manipulation
Aug 10, 2023Tactile sensing is of great importance during human hand usage such as object exploration, grasping and manipulation. Different types of tactile sensors have been designed during the past decades, which are mainly focused on either the fingertips for grasping or the upper-body for human-robot interaction. In this paper, a novel soft tactile sensor has been designed to mimic the functionality of human palm that can estimate the contact state of different objects. The tactile palm mainly consists of three parts including an electrode array, a soft cover skin and the conductive sponge. The design principle are described in details, with a number of experiments showcasing the effectiveness of the proposed design.
Fast calibration for ultrasound imaging guidance based on depth camera
Aug 10, 2023During the process of robot-assisted ultrasound(US) puncture, it is important to estimate the location of the puncture from the 2D US images. To this end, the calibration of the US image becomes an important issue. In this paper, we proposed a depth camera-based US calibration method, where an easy-to-deploy device is designed for the calibration. With this device, the coordinates of the puncture needle tip are collected respectively in US image and in the depth camera, upon which a correspondence matrix is built for calibration. Finally, a number of experiments are conducted to validate the effectiveness of our calibration method.
Homography matrix based trajectory planning method for robot uncalibrated visual servoing
Mar 16, 2023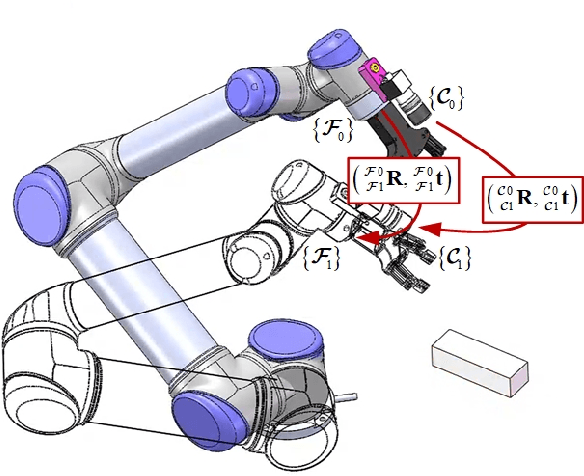
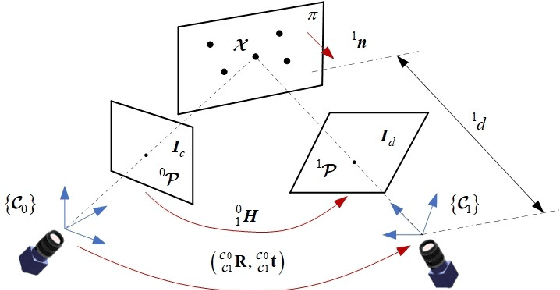
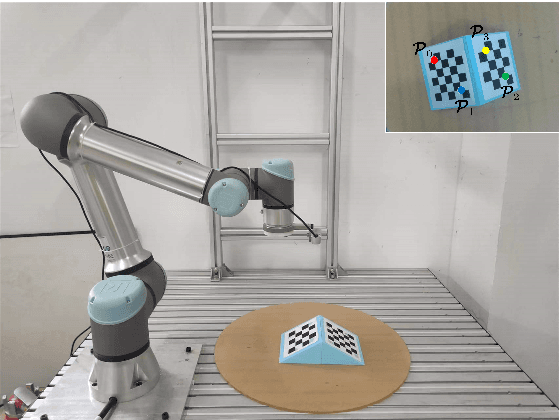
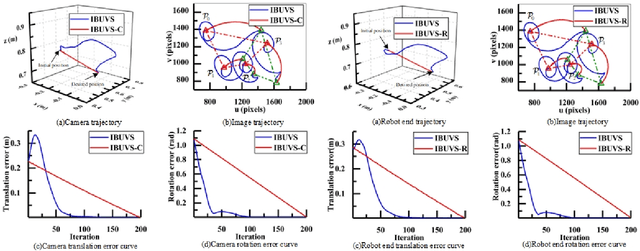
In view of the classical visual servoing trajectory planning method which only considers the camera trajectory, this paper proposes one homography matrix based trajectory planning method for robot uncalibrated visual servoing. Taking the robot-end-effector frame as one generic case, eigenvalue decomposition is utilized to calculate the infinite homography matrix of the robot-end-effector trajectory, and then the image feature-point trajectories corresponding to the camera rotation is obtained, while the image feature-point trajectories corresponding to the camera translation is obtained by the homography matrix. According to the additional image corresponding to the robot-end-effector rotation, the relationship between the robot-end-effector rotation and the variation of the image feature-points is obtained, and then the expression of the image trajectories corresponding to the optimal robot-end-effector trajectories (the rotation trajectory of the minimum geodesic and the linear translation trajectory) are obtained. Finally, the optimal image trajectories of the uncalibrated visual servoing controller is modified to track the image trajectories. Simulation experiments show that, compared with the classical IBUVS method, the proposed trajectory planning method can obtain the shortest path of any frame and complete the robot visual servoing task with large initial pose deviation.