 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShort-Context Dominance: How Much Local Context Natural Language Actually Needs?
Dec 08, 2025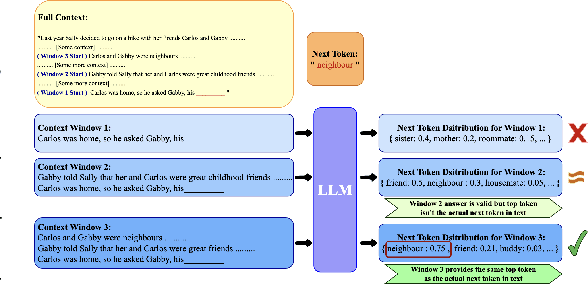
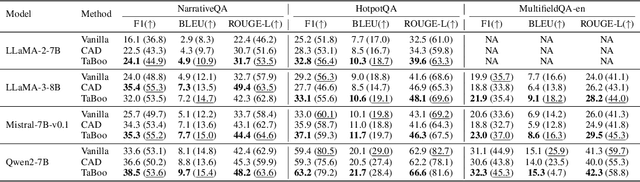
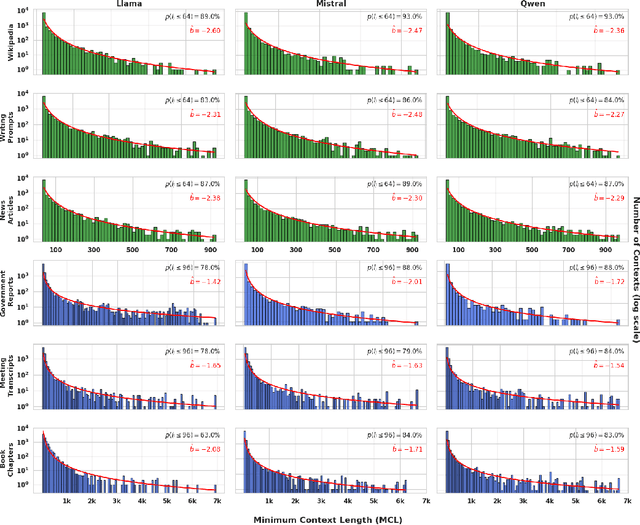
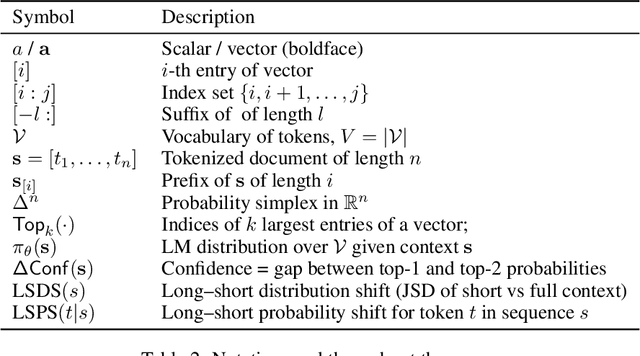
We investigate the short-context dominance hypothesis: that for most sequences, a small local prefix suffices to predict their next tokens. Using large language models as statistical oracles, we measure the minimum context length (MCL) needed to reproduce accurate full-context predictions across datasets with sequences of varying lengths. For sequences with 1-7k tokens from long-context documents, we consistently find that 75-80% require only the last 96 tokens at most. Given the dominance of short-context tokens, we then ask whether it is possible to detect challenging long-context sequences for which a short local prefix does not suffice for prediction. We introduce a practical proxy to MCL, called Distributionally Aware MCL (DaMCL), that does not require knowledge of the actual next-token and is compatible with sampling strategies beyond greedy decoding. Our experiments validate that simple thresholding of the metric defining DaMCL achieves high performance in detecting long vs. short context sequences. Finally, to counter the bias that short-context dominance induces in LLM output distributions, we develop an intuitive decoding algorithm that leverages our detector to identify and boost tokens that are long-range-relevant. Across Q&A tasks and model architectures, we confirm that mitigating the bias improves performance.
Coverage Axis++: Efficient Inner Point Selection for 3D Shape Skeletonization
Feb 01, 2024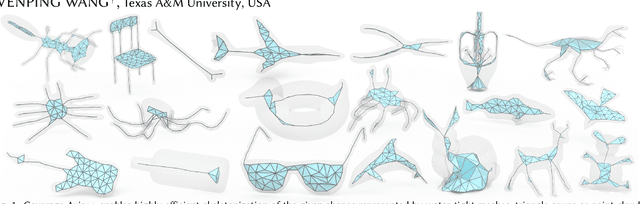
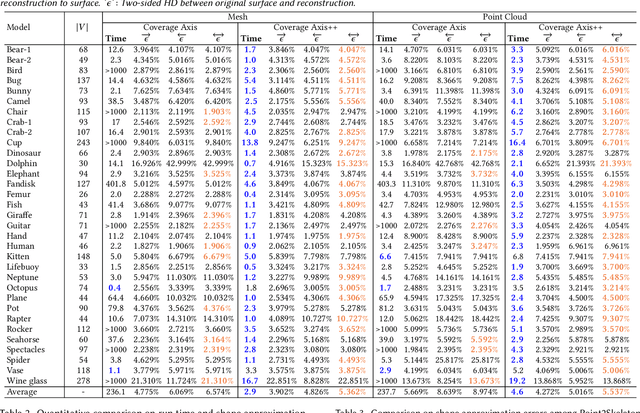
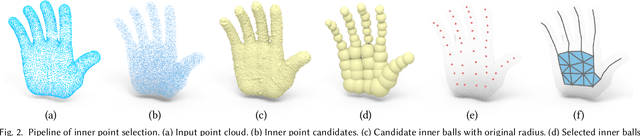
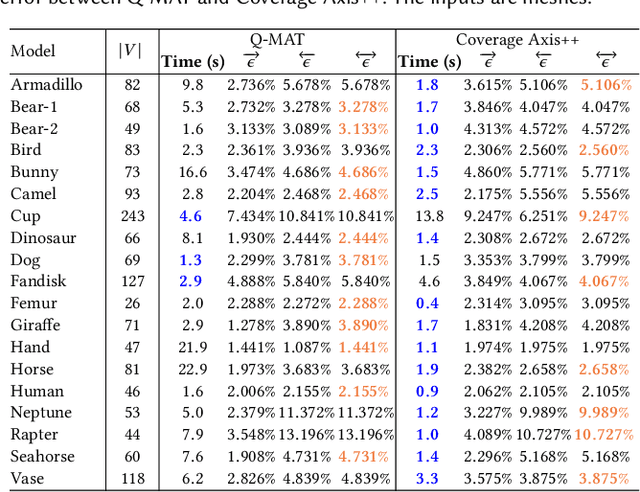
We introduce Coverage Axis++, a novel and efficient approach to 3D shape skeletonization. The current state-of-the-art approaches for this task often rely on the watertightness of the input or suffer from substantial computational costs, thereby limiting their practicality. To address this challenge, Coverage Axis++ proposes a heuristic algorithm to select skeletal points, offering a high-accuracy approximation of the Medial Axis Transform (MAT) while significantly mitigating computational intensity for various shape representations. We introduce a simple yet effective strategy that considers both shape coverage and uniformity to derive skeletal points. The selection procedure enforces consistency with the shape structure while favoring the dominant medial balls, which thus introduces a compact underlying shape representation in terms of MAT. As a result, Coverage Axis++ allows for skeletonization for various shape representations (e.g., water-tight meshes, triangle soups, point clouds), specification of the number of skeletal points, few hyperparameters, and highly efficient computation with improved reconstruction accuracy. Extensive experiments across a wide range of 3D shapes validate the efficiency and effectiveness of Coverage Axis++. The code will be publicly available once the paper is published.
Segmentation and Tracking of Vegetable Plants by Exploiting Vegetable Shape Feature for Precision Spray of Agricultural Robots
Jun 26, 2023With the increasing deployment of agricultural robots, the traditional manual spray of liquid fertilizer and pesticide is gradually being replaced by agricultural robots. For robotic precision spray application in vegetable farms, accurate plant phenotyping through instance segmentation and robust plant tracking are of great importance and a prerequisite for the following spray action. Regarding the robust tracking of vegetable plants, to solve the challenging problem of associating vegetables with similar color and texture in consecutive images, in this paper, a novel method of Multiple Object Tracking and Segmentation (MOTS) is proposed for instance segmentation and tracking of multiple vegetable plants. In our approach, contour and blob features are extracted to describe unique feature of each individual vegetable, and associate the same vegetables in different images. By assigning a unique ID for each vegetable, it ensures the robot to spray each vegetable exactly once, while traversing along the farm rows. Comprehensive experiments including ablation studies are conducted, which prove its superior performance over two State-Of-The-Art (SOTA) MOTS methods. Compared to the conventional MOTS methods, the proposed method is able to re-identify objects which have gone out of the camera field of view and re-appear again using the proposed data association strategy, which is important to ensure each vegetable be sprayed only once when the robot travels back and forth. Although the method is tested on lettuce farm, it can be applied to other similar vegetables such as broccoli and canola. Both code and the dataset of this paper is publicly released for the benefit of the community: https://github.com/NanH5837/LettuceMOTS.