 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAda3Drift: Adaptive Training-Time Drifting for One-Step 3D Visuomotor Robotic Manipulation
Mar 12, 2026Diffusion-based visuomotor policies effectively capture multimodal action distributions through iterative denoising, but their high inference latency limits real-time robotic control. Recent flow matching and consistency-based methods achieve single-step generation, yet sacrifice the ability to preserve distinct action modes, collapsing multimodal behaviors into averaged, often physically infeasible trajectories. We observe that the compute budget asymmetry in robotics (offline training vs.\ real-time inference) naturally motivates recovering this multimodal fidelity by shifting iterative refinement from inference time to training time. Building on this insight, we propose Ada3Drift, which learns a training-time drifting field that attracts predicted actions toward expert demonstration modes while repelling them from other generated samples, enabling high-fidelity single-step generation (1 NFE) from 3D point cloud observations. To handle the few-shot robotic regime, Ada3Drift further introduces a sigmoid-scheduled loss transition from coarse distribution learning to mode-sharpening refinement, and multi-scale field aggregation that captures action modes at varying spatial granularities. Experiments on three simulation benchmarks (Adroit, Meta-World, and RoboTwin) and real-world robotic manipulation tasks demonstrate that Ada3Drift achieves state-of-the-art performance while requiring $10\times$ fewer function evaluations than diffusion-based alternatives.
Action-Geometry Prediction with 3D Geometric Prior for Bimanual Manipulation
Feb 27, 2026Bimanual manipulation requires policies that can reason about 3D geometry, anticipate how it evolves under action, and generate smooth, coordinated motions. However, existing methods typically rely on 2D features with limited spatial awareness, or require explicit point clouds that are difficult to obtain reliably in real-world settings. At the same time, recent 3D geometric foundation models show that accurate and diverse 3D structure can be reconstructed directly from RGB images in a fast and robust manner. We leverage this opportunity and propose a framework that builds bimanual manipulation directly on a pre-trained 3D geometric foundation model. Our policy fuses geometry-aware latents, 2D semantic features, and proprioception into a unified state representation, and uses diffusion model to jointly predict a future action chunk and a future 3D latent that decodes into a dense pointmap. By explicitly predicting how the 3D scene will evolve together with the action sequence, the policy gains strong spatial understanding and predictive capability using only RGB observations. We evaluate our method both in simulation on the RoboTwin benchmark and in real-world robot executions. Our approach consistently outperforms 2D-based and point-cloud-based baselines, achieving state-of-the-art performance in manipulation success, inter-arm coordination, and 3D spatial prediction accuracy. Code is available at https://github.com/Chongyang-99/GAP.git.
REACT-LLM: A Benchmark for Evaluating LLM Integration with Causal Features in Clinical Prognostic Tasks
Nov 13, 2025Large Language Models (LLMs) and causal learning each hold strong potential for clinical decision making (CDM). However, their synergy remains poorly understood, largely due to the lack of systematic benchmarks evaluating their integration in clinical risk prediction. In real-world healthcare, identifying features with causal influence on outcomes is crucial for actionable and trustworthy predictions. While recent work highlights LLMs' emerging causal reasoning abilities, there lacks comprehensive benchmarks to assess their causal learning and performance informed by causal features in clinical risk prediction. To address this, we introduce REACT-LLM, a benchmark designed to evaluate whether combining LLMs with causal features can enhance clinical prognostic performance and potentially outperform traditional machine learning (ML) methods. Unlike existing LLM-clinical benchmarks that often focus on a limited set of outcomes, REACT-LLM evaluates 7 clinical outcomes across 2 real-world datasets, comparing 15 prominent LLMs, 6 traditional ML models, and 3 causal discovery (CD) algorithms. Our findings indicate that while LLMs perform reasonably in clinical prognostics, they have not yet outperformed traditional ML models. Integrating causal features derived from CD algorithms into LLMs offers limited performance gains, primarily due to the strict assumptions of many CD methods, which are often violated in complex clinical data. While the direct integration yields limited improvement, our benchmark reveals a more promising synergy.
Adapting Human Mesh Recovery with Vision-Language Feedback
Feb 06, 2025



Human mesh recovery can be approached using either regression-based or optimization-based methods. Regression models achieve high pose accuracy but struggle with model-to-image alignment due to the lack of explicit 2D-3D correspondences. In contrast, optimization-based methods align 3D models to 2D observations but are prone to local minima and depth ambiguity. In this work, we leverage large vision-language models (VLMs) to generate interactive body part descriptions, which serve as implicit constraints to enhance 3D perception and limit the optimization space. Specifically, we formulate monocular human mesh recovery as a distribution adaptation task by integrating both 2D observations and language descriptions. To bridge the gap between text and 3D pose signals, we first train a text encoder and a pose VQ-VAE, aligning texts to body poses in a shared latent space using contrastive learning. Subsequently, we employ a diffusion-based framework to refine the initial parameters guided by gradients derived from both 2D observations and text descriptions. Finally, the model can produce poses with accurate 3D perception and image consistency. Experimental results on multiple benchmarks validate its effectiveness. The code will be made publicly available.
Low-Light Image Enhancement by Learning Contrastive Representations in Spatial and Frequency Domains
Mar 23, 2023



Images taken under low-light conditions tend to suffer from poor visibility, which can decrease image quality and even reduce the performance of the downstream tasks. It is hard for a CNN-based method to learn generalized features that can recover normal images from the ones under various unknow low-light conditions. In this paper, we propose to incorporate the contrastive learning into an illumination correction network to learn abstract representations to distinguish various low-light conditions in the representation space, with the purpose of enhancing the generalizability of the network. Considering that light conditions can change the frequency components of the images, the representations are learned and compared in both spatial and frequency domains to make full advantage of the contrastive learning. The proposed method is evaluated on LOL and LOL-V2 datasets, the results show that the proposed method achieves better qualitative and quantitative results compared with other state-of-the-arts.
Equivalence of Correlation Filter and Convolution Filter in Visual Tracking
May 04, 2021(Discriminative) Correlation Filter has been successfully applied to visual tracking and has advanced the field significantly in recent years. Correlation filter-based trackers consider visual tracking as a problem of matching the feature template of the object and candidate regions in the detection sample, in which correlation filter provides the means to calculate the similarities. In contrast, convolution filter is usually used for blurring, sharpening, embossing, edge detection, etc in image processing. On the surface, correlation filter and convolution filter are usually used for different purposes. In this paper, however, we proves, for the first time, that correlation filter and convolution filter are equivalent in the sense that their minimum mean-square errors (MMSEs) in visual tracking are equal, under the condition that the optimal solutions exist and the ideal filter response is Gaussian and centrosymmetric. This result gives researchers the freedom to choose correlation or convolution in formulating their trackers. It also suggests that the explanation of the ideal response in terms of similarities is not essential.
Learning Residue-Aware Correlation Filters and Refining Scale Estimates with the GrabCut for Real-Time UAV Tracking
Apr 07, 2021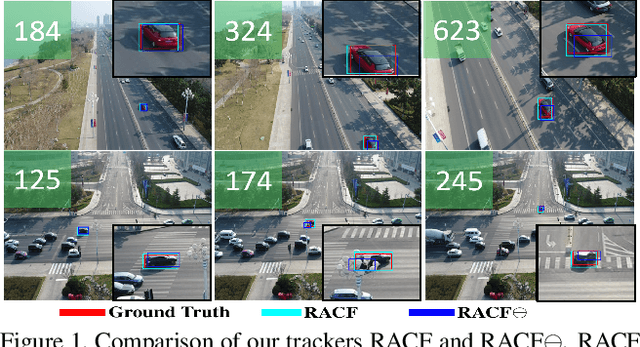
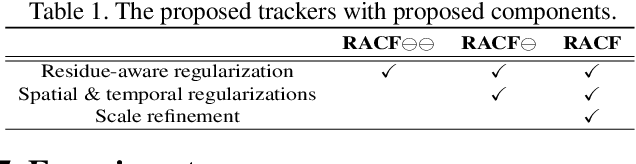
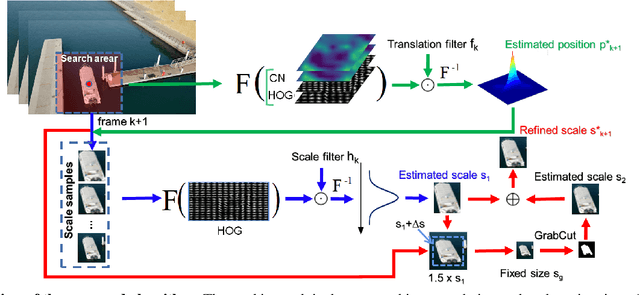
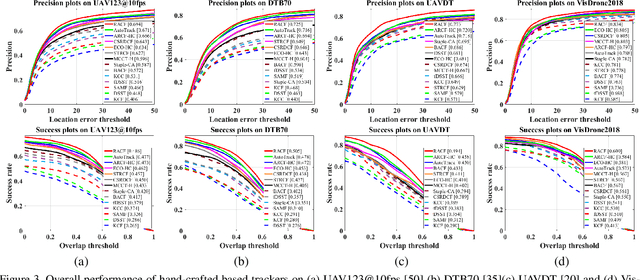
Unmanned aerial vehicle (UAV)-based tracking is attracting increasing attention and developing rapidly in applications such as agriculture, aviation, navigation, transportation and public security. Recently, discriminative correlation filters (DCF)-based trackers have stood out in UAV tracking community for their high efficiency and appealing robustness on a single CPU. However, due to limited onboard computation resources and other challenges the efficiency and accuracy of existing DCF-based approaches is still not satisfying. In this paper, we explore using segmentation by the GrabCut to improve the wildly adopted discriminative scale estimation in DCF-based trackers, which, as a mater of fact, greatly impacts the precision and accuracy of the trackers since accumulated scale error degrades the appearance model as online updating goes on. Meanwhile, inspired by residue representation, we exploit the residue nature inherent to videos and propose residue-aware correlation filters that show better convergence properties in filter learning. Extensive experiments are conducted on four UAV benchmarks, namely, UAV123@10fps, DTB70, UAVDT and Vistrone2018 (VisDrone2018-test-dev). The results show that our method achieves state-of-the-art performance.