 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Hidden Monotone Variational Inequalities with Surrogate Losses
Nov 07, 2024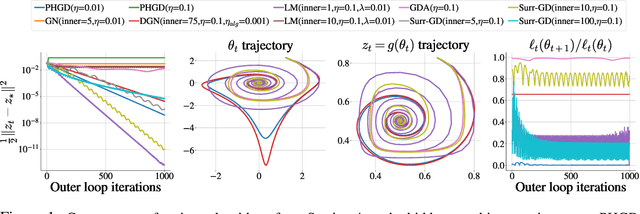
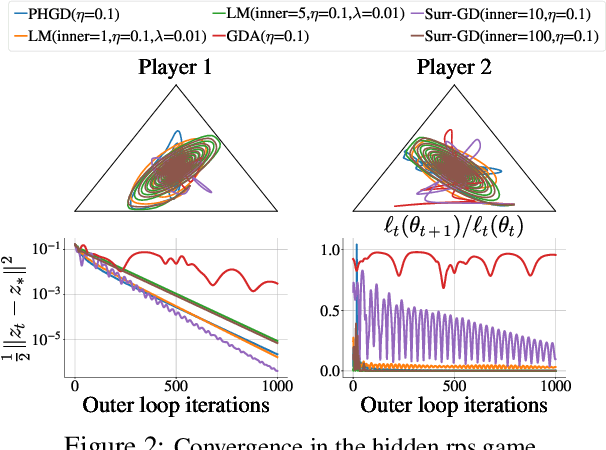
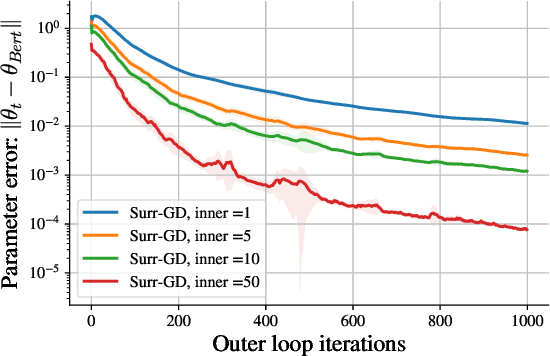
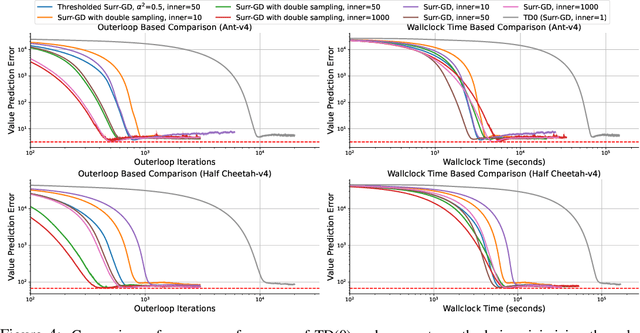
Deep learning has proven to be effective in a wide variety of loss minimization problems. However, many applications of interest, like minimizing projected Bellman error and min-max optimization, cannot be modelled as minimizing a scalar loss function but instead correspond to solving a variational inequality (VI) problem. This difference in setting has caused many practical challenges as naive gradient-based approaches from supervised learning tend to diverge and cycle in the VI case. In this work, we propose a principled surrogate-based approach compatible with deep learning to solve VIs. We show that our surrogate-based approach has three main benefits: (1) under assumptions that are realistic in practice (when hidden monotone structure is present, interpolation, and sufficient optimization of the surrogates), it guarantees convergence, (2) it provides a unifying perspective of existing methods, and (3) is amenable to existing deep learning optimizers like ADAM. Experimentally, we demonstrate our surrogate-based approach is effective in min-max optimization and minimizing projected Bellman error. Furthermore, in the deep reinforcement learning case, we propose a novel variant of TD(0) which is more compute and sample efficient.
Recursive Reasoning in Minimax Games: A Level $k$ Gradient Play Method
Oct 29, 2022Despite the success of generative adversarial networks (GANs) in generating visually appealing images, they are notoriously challenging to train. In order to stabilize the learning dynamics in minimax games, we propose a novel recursive reasoning algorithm: Level $k$ Gradient Play (Lv.$k$ GP) algorithm. In contrast to many existing algorithms, our algorithm does not require sophisticated heuristics or curvature information. We show that as $k$ increases, Lv.$k$ GP converges asymptotically towards an accurate estimation of players' future strategy. Moreover, we justify that Lv.$\infty$ GP naturally generalizes a line of provably convergent game dynamics which rely on predictive updates. Furthermore, we provide its local convergence property in nonconvex-nonconcave zero-sum games and global convergence in bilinear and quadratic games. By combining Lv.$k$ GP with Adam optimizer, our algorithm shows a clear advantage in terms of performance and computational overhead compared to other methods. Using a single Nvidia RTX3090 GPU and 30 times fewer parameters than BigGAN on CIFAR-10, we achieve an FID of 10.17 for unconditional image generation within 30 hours, allowing GAN training on common computational resources to reach state-of-the-art performance.
Wood-leaf classification of tree point cloud based on intensity and geometrical information
Aug 02, 2021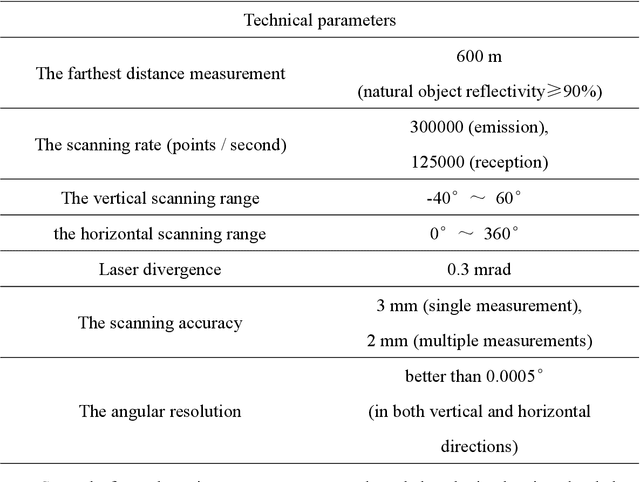
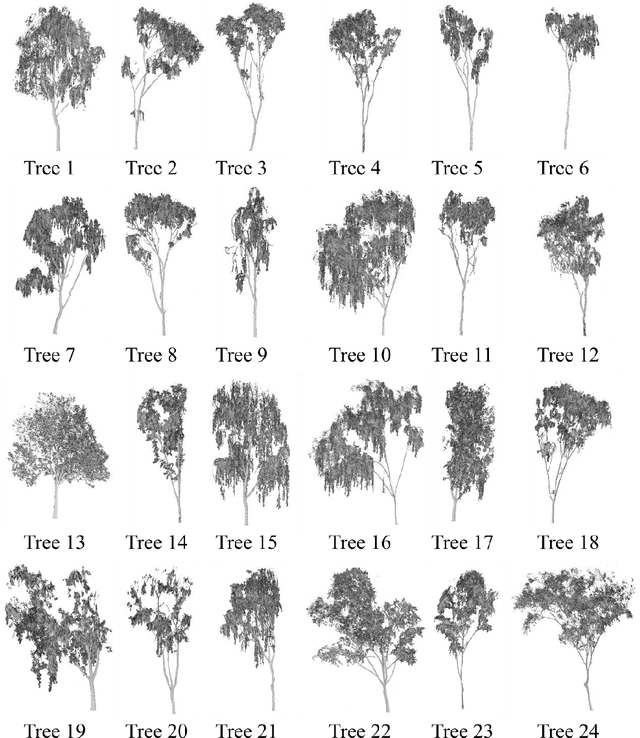
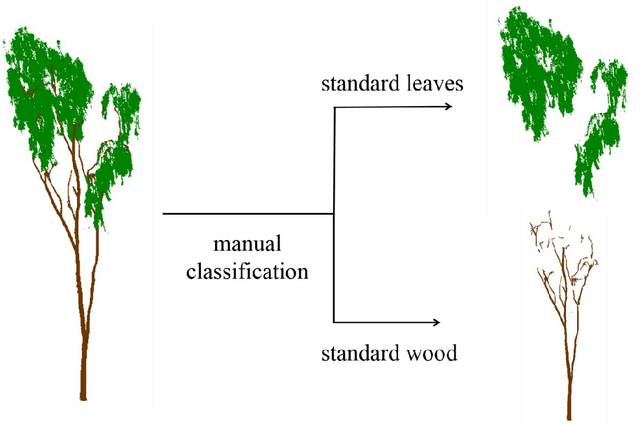
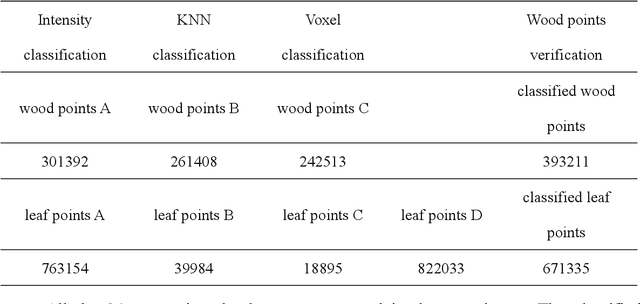
Terrestrial laser scanning (TLS) can obtain tree point cloud with high precision and high density. Efficient classification of wood points and leaf points is essential to study tree structural parameters and ecological characteristics. By using both the intensity and spatial information, a three-step classification and verification method was proposed to achieve automated wood-leaf classification. Tree point cloud was classified into wood points and leaf points by using intensity threshold, neighborhood density and voxelization successively. Experiment was carried in Haidian Park, Beijing, and 24 trees were scanned by using the RIEGL VZ-400 scanner. The tree point clouds were processed by using the proposed method, whose classification results were compared with the manual classification results which were used as standard results. To evaluate the classification accuracy, three indicators were used in the experiment, which are Overall Accuracy (OA), Kappa coefficient (Kappa) and Matthews correlation coefficient (MCC). The ranges of OA, Kappa and MCC of the proposed method are from 0.9167 to 0.9872, from 0.7276 to 0.9191, and from 0.7544 to 0.9211 respectively. The average values of OA, Kappa and MCC are 0.9550, 0.8547 and 0.8627 respectively. Time cost of wood-leaf classification was also recorded to evaluate the algorithm efficiency. The average processing time are 1.4 seconds per million points. The results showed that the proposed method performed well automatically and quickly on wood-leaf classification based on the experimental dataset.
Automatic sampling and training method for wood-leaf classification based on tree terrestrial point cloud
Dec 06, 2020



Terrestrial laser scanning technology provides an efficient and accuracy solution for acquiring three-dimensional information of plants. The leaf-wood classification of plant point cloud data is a fundamental step for some forestry and biological research. An automatic sampling and training method for classification was proposed based on tree point cloud data. The plane fitting method was used for selecting leaf sample points and wood sample points automatically, then two local features were calculated for training and classification by using support vector machine (SVM) algorithm. The point cloud data of ten trees were tested by using the proposed method and a manual selection method. The average correct classification rate and kappa coefficient are 0.9305 and 0.7904, respectively. The results show that the proposed method had better efficiency and accuracy comparing to the manual selection method.
Automated classification of stems and leaves of potted plants based on point cloud data
Feb 28, 2020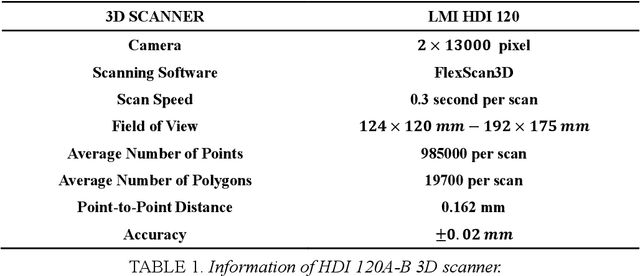
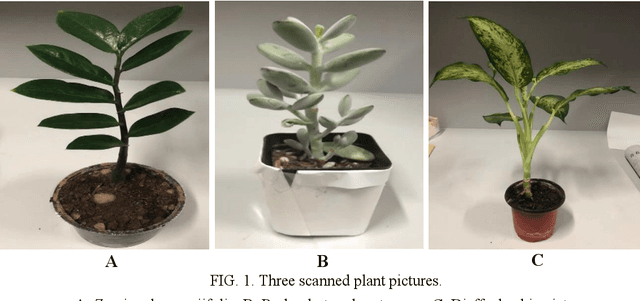
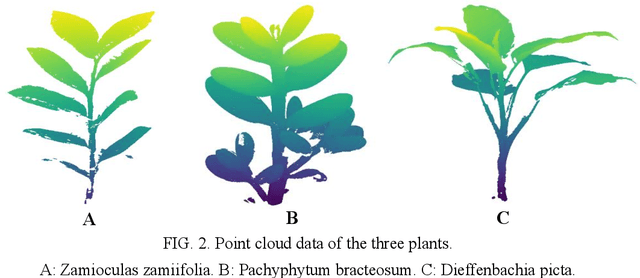

The accurate classification of plant organs is a key step in monitoring the growing status and physiology of plants. A classification method was proposed to classify the leaves and stems of potted plants automatically based on the point cloud data of the plants, which is a nondestructive acquisition. The leaf point training samples were automatically extracted by using the three-dimensional convex hull algorithm, while stem point training samples were extracted by using the point density of a two-dimensional projection. The two training sets were used to classify all the points into leaf points and stem points by utilizing the support vector machine (SVM) algorithm. The proposed method was tested by using the point cloud data of three potted plants and compared with two other methods, which showed that the proposed method can classify leaf and stem points accurately and efficiently.