 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Computation Pruning for the Forgetting Transformer
Apr 09, 2025The recently proposed Forgetting Transformer (FoX) incorporates a forget gate into softmax attention and has shown consistently better or on-par performance compared to the standard RoPE-based Transformer. Notably, many attention heads in FoX tend to forget quickly, causing their output at each timestep to rely primarily on the local context. Based on this observation, we propose Adaptive Computation Pruning (ACP) for FoX, a method that dynamically prunes computations involving input-output dependencies that are strongly decayed by the forget gate. This is achieved using a dynamically set pruning threshold that ensures that the pruned attention weights remain negligible. We apply ACP to language model pretraining with FoX and show it consistently reduces the number of FLOPs in softmax attention by around 70% across different model sizes and context lengths, resulting in a roughly 10% to 35% improvement in training throughput. Furthermore, longer context lengths yield greater computational savings. All these speed improvements are achieved without any performance degradation. We also perform several analyses to provide deeper insights into our method, such as examining the pruning patterns and analyzing the distribution of FLOP savings across different attention heads. Our code is available at https://github.com/zhixuan-lin/arctic-fox.
Forgetting Transformer: Softmax Attention with a Forget Gate
Mar 03, 2025An essential component of modern recurrent sequence models is the forget gate. While Transformers do not have an explicit recurrent form, we show that a forget gate can be naturally incorporated into Transformers by down-weighting the unnormalized attention scores in a data-dependent way. We name this attention mechanism the Forgetting Attention and the resulting model the Forgetting Transformer (FoX). We show that FoX outperforms the Transformer on long-context language modeling, length extrapolation, and short-context downstream tasks, while performing on par with the Transformer on long-context downstream tasks. Moreover, it is compatible with the FlashAttention algorithm and does not require any positional embeddings. Several analyses, including the needle-in-the-haystack test, show that FoX also retains the Transformer's superior long-context capabilities over recurrent sequence models such as Mamba-2, HGRN2, and DeltaNet. We also introduce a "Pro" block design that incorporates some common architectural components in recurrent sequence models and find it significantly improves the performance of both FoX and the Transformer. Our code is available at https://github.com/zhixuan-lin/forgetting-transformer.
The Curse of Diversity in Ensemble-Based Exploration
May 07, 2024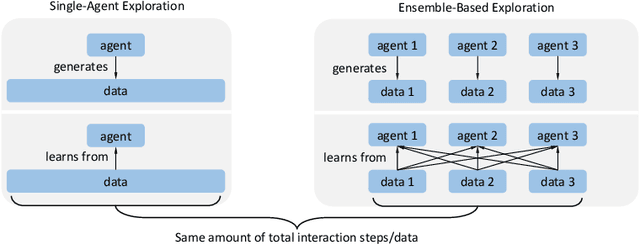

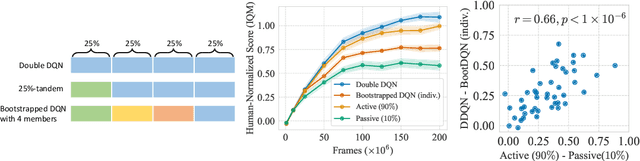
We uncover a surprising phenomenon in deep reinforcement learning: training a diverse ensemble of data-sharing agents -- a well-established exploration strategy -- can significantly impair the performance of the individual ensemble members when compared to standard single-agent training. Through careful analysis, we attribute the degradation in performance to the low proportion of self-generated data in the shared training data for each ensemble member, as well as the inefficiency of the individual ensemble members to learn from such highly off-policy data. We thus name this phenomenon the curse of diversity. We find that several intuitive solutions -- such as a larger replay buffer or a smaller ensemble size -- either fail to consistently mitigate the performance loss or undermine the advantages of ensembling. Finally, we demonstrate the potential of representation learning to counteract the curse of diversity with a novel method named Cross-Ensemble Representation Learning (CERL) in both discrete and continuous control domains. Our work offers valuable insights into an unexpected pitfall in ensemble-based exploration and raises important caveats for future applications of similar approaches.
Improving Generative Imagination in Object-Centric World Models
Oct 05, 2020
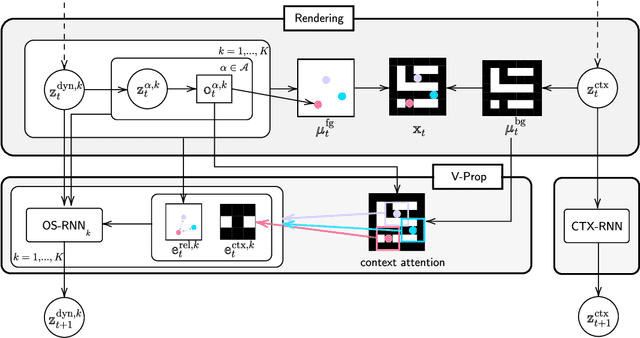
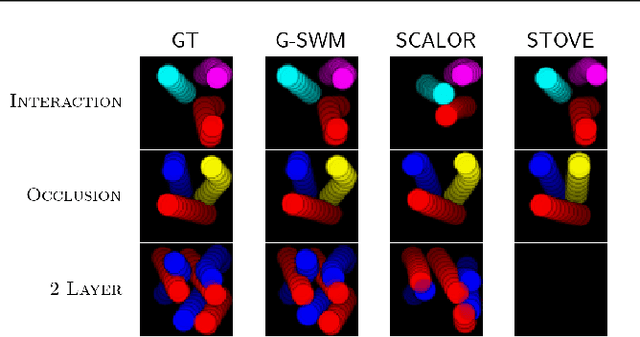
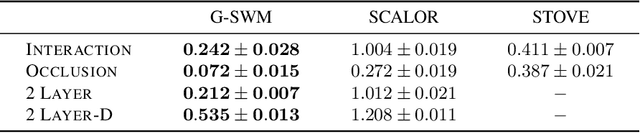
The remarkable recent advances in object-centric generative world models raise a few questions. First, while many of the recent achievements are indispensable for making a general and versatile world model, it is quite unclear how these ingredients can be integrated into a unified framework. Second, despite using generative objectives, abilities for object detection and tracking are mainly investigated, leaving the crucial ability of temporal imagination largely under question. Third, a few key abilities for more faithful temporal imagination such as multimodal uncertainty and situation-awareness are missing. In this paper, we introduce Generative Structured World Models (G-SWM). The G-SWM achieves the versatile world modeling not only by unifying the key properties of previous models in a principled framework but also by achieving two crucial new abilities, multimodal uncertainty and situation-awareness. Our thorough investigation on the temporal generation ability in comparison to the previous models demonstrates that G-SWM achieves the versatility with the best or comparable performance for all experiment settings including a few complex settings that have not been tested before.
SPACE: Unsupervised Object-Oriented Scene Representation via Spatial Attention and Decomposition
Feb 18, 2020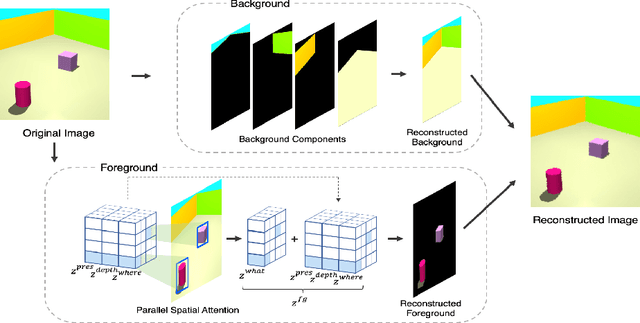
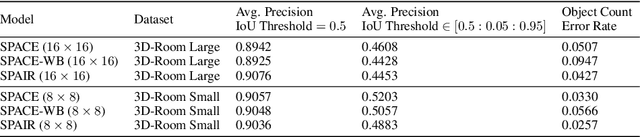
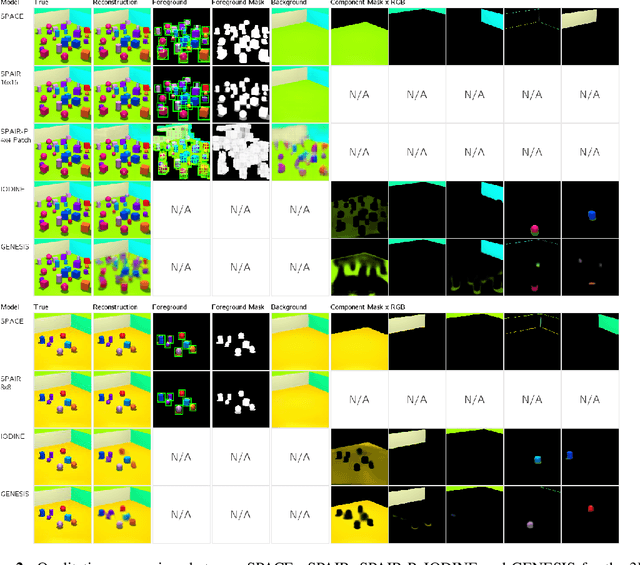
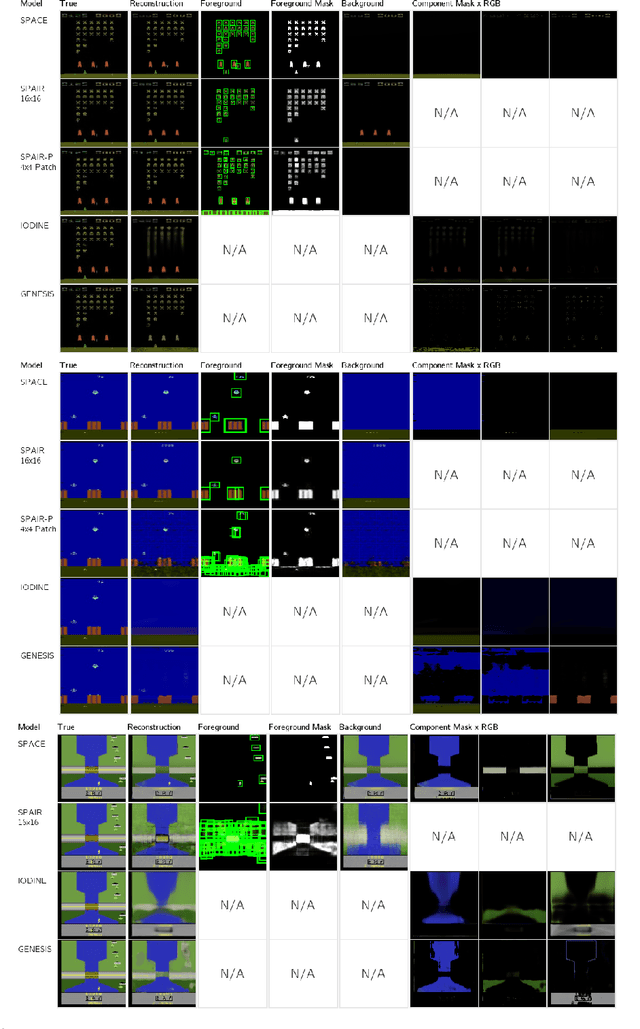
The ability to decompose complex multi-object scenes into meaningful abstractions like objects is fundamental to achieve higher-level cognition. Previous approaches for unsupervised object-oriented scene representation learning are either based on spatial-attention or scene-mixture approaches and limited in scalability which is a main obstacle towards modeling real-world scenes. In this paper, we propose a generative latent variable model, called SPACE, that provides a unified probabilistic modeling framework that combines the best of spatial-attention and scene-mixture approaches. SPACE can explicitly provide factorized object representations for foreground objects while also decomposing background segments of complex morphology. Previous models are good at either of these, but not both. SPACE also resolves the scalability problems of previous methods by incorporating parallel spatial-attention and thus is applicable to scenes with a large number of objects without performance degradations. We show through experiments on Atari and 3D-Rooms that SPACE achieves the above properties consistently in comparison to SPAIR, IODINE, and GENESIS. Results of our experiments can be found on our project website: https://sites.google.com/view/space-project-page
GIFT: Learning Transformation-Invariant Dense Visual Descriptors via Group CNNs
Nov 14, 2019
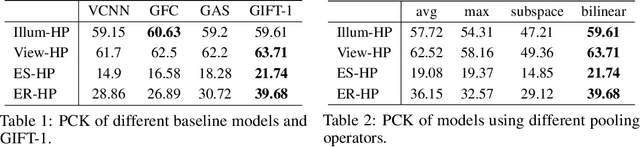
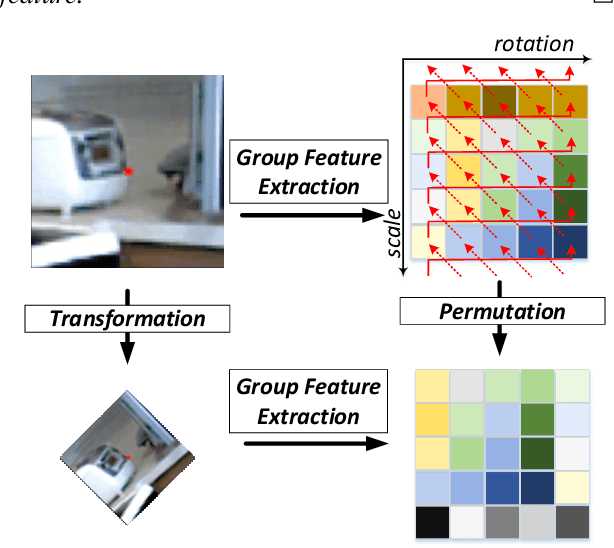
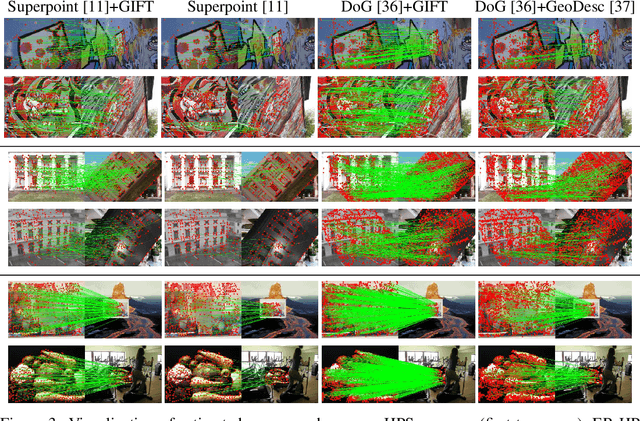
Finding local correspondences between images with different viewpoints requires local descriptors that are robust against geometric transformations. An approach for transformation invariance is to integrate out the transformations by pooling the features extracted from transformed versions of an image. However, the feature pooling may sacrifice the distinctiveness of the resulting descriptors. In this paper, we introduce a novel visual descriptor named Group Invariant Feature Transform (GIFT), which is both discriminative and robust to geometric transformations. The key idea is that the features extracted from the transformed versions of an image can be viewed as a function defined on the group of the transformations. Instead of feature pooling, we use group convolutions to exploit underlying structures of the extracted features on the group, resulting in descriptors that are both discriminative and provably invariant to the group of transformations. Extensive experiments show that GIFT outperforms state-of-the-art methods on several benchmark datasets and practically improves the performance of relative pose estimation.