 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFragile Model Watermark for integrity protection: leveraging boundary volatility and sensitive sample-pairing
Apr 11, 2024



Neural networks have increasingly influenced people's lives. Ensuring the faithful deployment of neural networks as designed by their model owners is crucial, as they may be susceptible to various malicious or unintentional modifications, such as backdooring and poisoning attacks. Fragile model watermarks aim to prevent unexpected tampering that could lead DNN models to make incorrect decisions. They ensure the detection of any tampering with the model as sensitively as possible.However, prior watermarking methods suffered from inefficient sample generation and insufficient sensitivity, limiting their practical applicability. Our approach employs a sample-pairing technique, placing the model boundaries between pairs of samples, while simultaneously maximizing logits. This ensures that the model's decision results of sensitive samples change as much as possible and the Top-1 labels easily alter regardless of the direction it moves.
Distractor-Aware Fast Tracking via Dynamic Convolutions and MOT Philosophy
Apr 25, 2021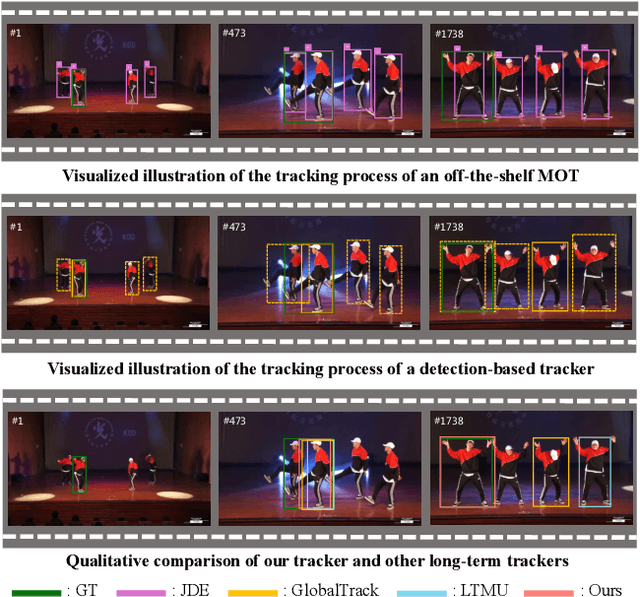
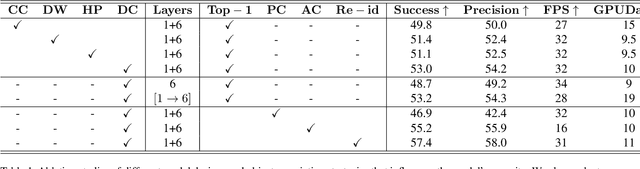
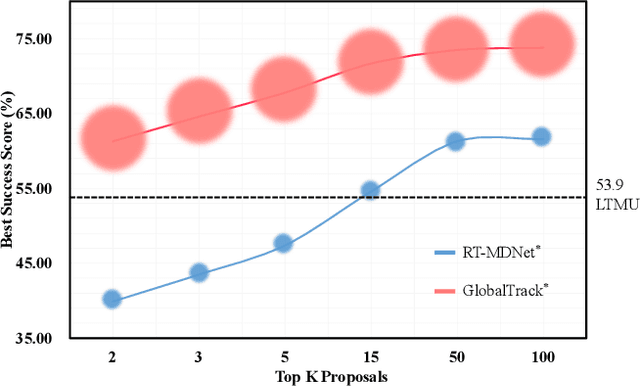
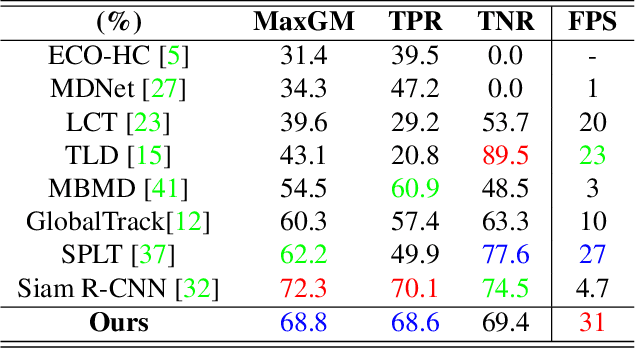
A practical long-term tracker typically contains three key properties, i.e. an efficient model design, an effective global re-detection strategy and a robust distractor awareness mechanism. However, most state-of-the-art long-term trackers (e.g., Pseudo and re-detecting based ones) do not take all three key properties into account and therefore may either be time-consuming or drift to distractors. To address the issues, we propose a two-task tracking frame work (named DMTrack), which utilizes two core components (i.e., one-shot detection and re-identification (re-id) association) to achieve distractor-aware fast tracking via Dynamic convolutions (d-convs) and Multiple object tracking (MOT) philosophy. To achieve precise and fast global detection, we construct a lightweight one-shot detector using a novel dynamic convolutions generation method, which provides a unified and more flexible way for fusing target information into the search field. To distinguish the target from distractors, we resort to the philosophy of MOT to reason distractors explicitly by maintaining all potential similarities' tracklets. Benefited from the strength of high recall detection and explicit object association, our tracker achieves state-of-the-art performance on the LaSOT, OxUvA, TLP, VOT2018LT and VOT2019LT benchmarks and runs in real-time (3x faster than comparisons).
Learning to Filter: Siamese Relation Network for Robust Tracking
Apr 02, 2021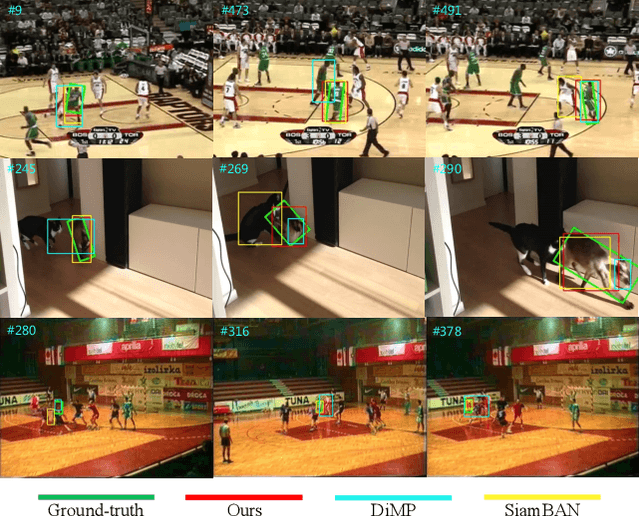

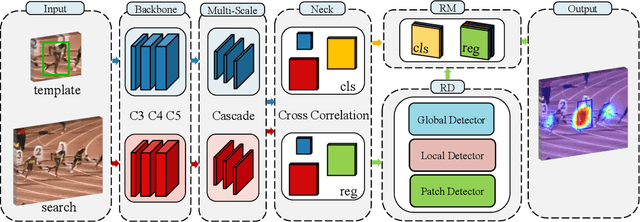

Despite the great success of Siamese-based trackers, their performance under complicated scenarios is still not satisfying, especially when there are distractors. To this end, we propose a novel Siamese relation network, which introduces two efficient modules, i.e. Relation Detector (RD) and Refinement Module (RM). RD performs in a meta-learning way to obtain a learning ability to filter the distractors from the background while RM aims to effectively integrate the proposed RD into the Siamese framework to generate accurate tracking result. Moreover, to further improve the discriminability and robustness of the tracker, we introduce a contrastive training strategy that attempts not only to learn matching the same target but also to learn how to distinguish the different objects. Therefore, our tracker can achieve accurate tracking results when facing background clutters, fast motion, and occlusion. Experimental results on five popular benchmarks, including VOT2018, VOT2019, OTB100, LaSOT, and UAV123, show that the proposed method is effective and can achieve state-of-the-art results. The code will be available at https://github.com/hqucv/siamrn