 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Study of Using Spatial-Temporal Graph Convolutional Networks for Predicting Availability in Bike Sharing Schemes
Apr 21, 2021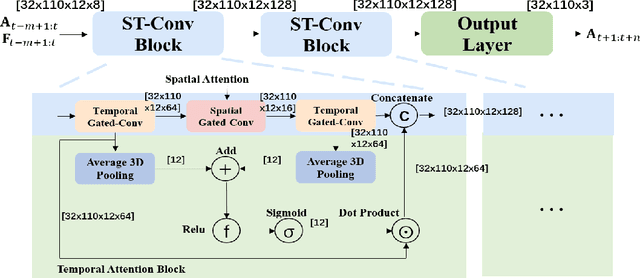
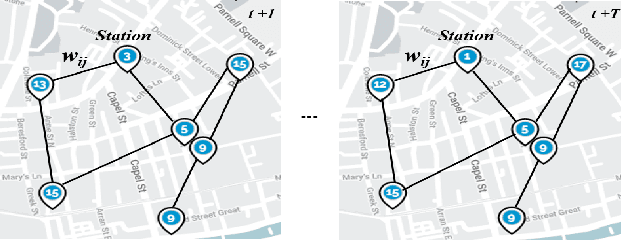
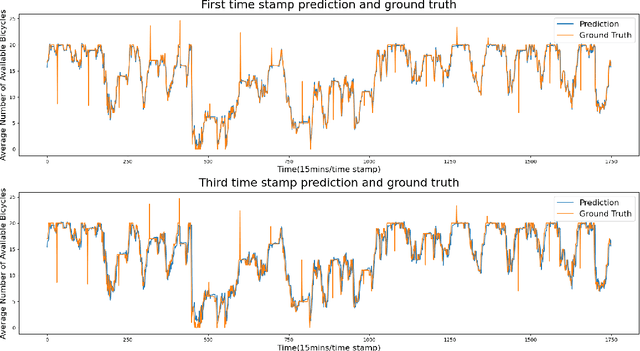
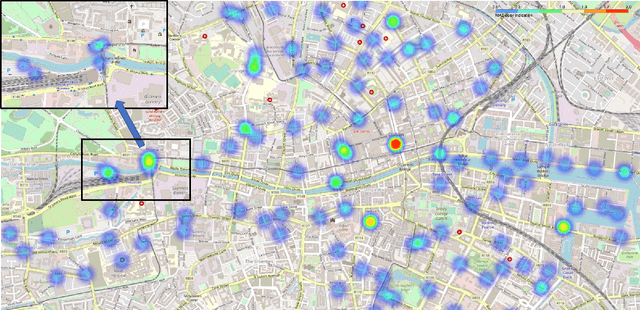
Accurately forecasting transportation demand is crucial for efficient urban traffic guidance, control and management. One solution to enhance the level of prediction accuracy is to leverage graph convolutional networks (GCN), a neural network based modelling approach with the ability to process data contained in graph based structures. As a powerful extension of GCN, a spatial-temporal graph convolutional network (ST-GCN) aims to capture the relationship of data contained in the graphical nodes across both spatial and temporal dimensions, which presents a novel deep learning paradigm for the analysis of complex time-series data that also involves spatial information as present in transportation use cases. In this paper, we present an Attention-based ST-GCN (AST-GCN) for predicting the number of available bikes in bike-sharing systems in cities, where the attention-based mechanism is introduced to further improve the performance of a ST-GCN. Furthermore, we also discuss the impacts of different modelling methods of adjacency matrices on the proposed architecture. Our experimental results are presented using two real-world datasets, Dublinbikes and NYC-Citi Bike, to illustrate the efficacy of our proposed model which outperforms the majority of existing approaches.
Hercules: An Autonomous Logistic Vehicle for Contact-less Goods Transportation During the COVID-19 Outbreak
Apr 16, 2020
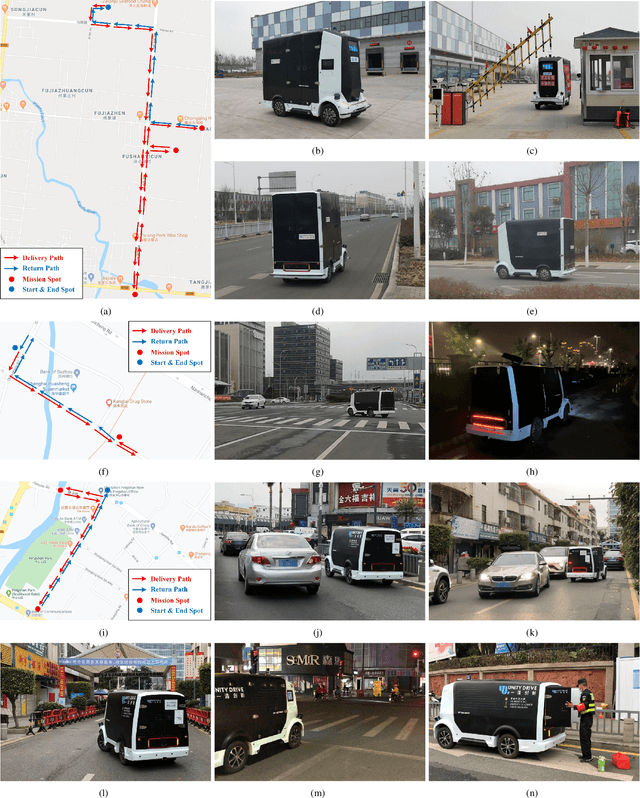
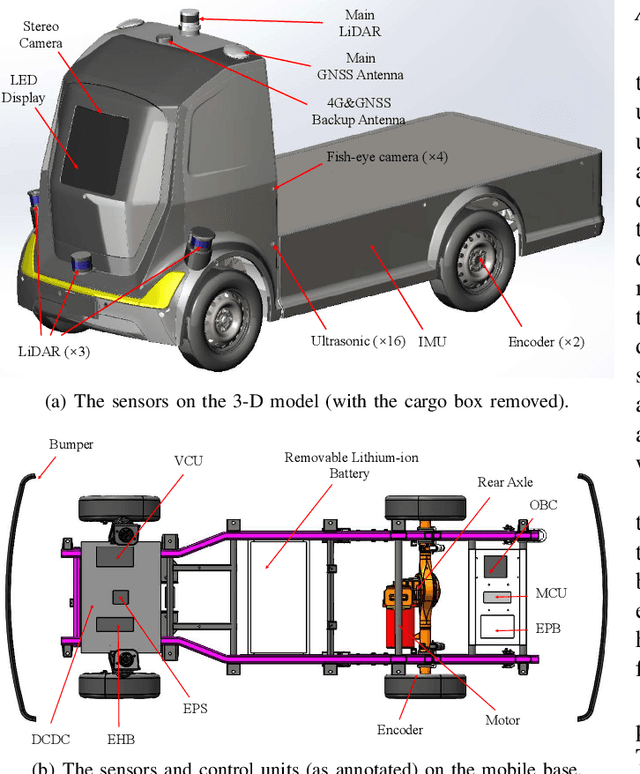
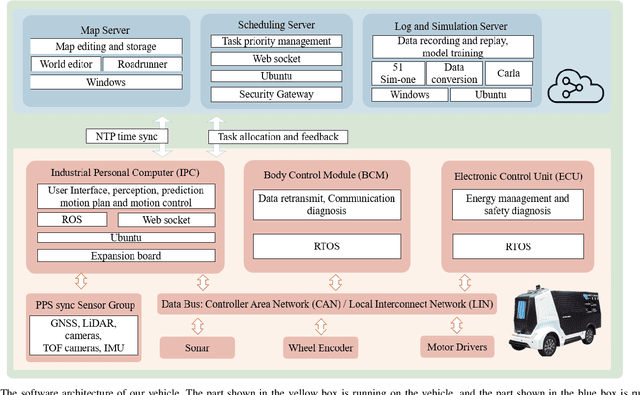
Since December 2019, the coronavirus disease 2019 (COVID-19) has spread rapidly across China. As at the date of writing this article, the disease has been globally reported in 100 countries, infected over 100,000 people and caused over 3,000 deaths. Avoiding person-to-person transmission is an effective approach to control and prevent the epidemic. However, many daily activities, such as logistics transporting goods in our daily life, inevitably involve person-to-person contact. To achieve contact-less goods transportation, using an autonomous logistic vehicle has become the preferred choice. This article presents Hercules, an autonomous logistic vehicle used for contact-less goods transportation during the outbreak of COVID-19. The vehicle is designed with autonomous navigation capability. We provide details on the hardware and software, as well as the algorithms to achieve autonomous navigation including perception, planning and control. This paper is accompanied by a demonstration video and a dataset, which are available here: https://sites.google.com/view/contact-less-transportation.