 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSilhouette-to-Contour Registration: Aligning Intraoral Scan Models with Cephalometric Radiographs
Nov 18, 2025Reliable 3D-2D alignment between intraoral scan (IOS) models and lateral cephalometric radiographs is critical for orthodontic diagnosis, yet conventional intensity-driven registration methods struggle under real clinical conditions, where cephalograms exhibit projective magnification, geometric distortion, low-contrast dental crowns, and acquisition-dependent variation. These factors hinder the stability of appearance-based similarity metrics and often lead to convergence failures or anatomically implausible alignments. To address these limitations, we propose DentalSCR, a pose-stable, contour-guided framework for accurate and interpretable silhouette-to-contour registration. Our method first constructs a U-Midline Dental Axis (UMDA) to establish a unified cross-arch anatomical coordinate system, thereby stabilizing initialization and standardizing projection geometry across cases. Using this reference frame, we generate radiograph-like projections via a surface-based DRR formulation with coronal-axis perspective and Gaussian splatting, which preserves clinical source-object-detector magnification and emphasizes external silhouettes. Registration is then formulated as a 2D similarity transform optimized with a symmetric bidirectional Chamfer distance under a hierarchical coarse-to-fine schedule, enabling both large capture range and subpixel-level contour agreement. We evaluate DentalSCR on 34 expert-annotated clinical cases. Experimental results demonstrate substantial reductions in landmark error-particularly at posterior teeth-tighter dispersion on the lower jaw, and low Chamfer and controlled Hausdorff distances at the curve level. These findings indicate that DentalSCR robustly handles real-world cephalograms and delivers high-fidelity, clinically inspectable 3D--2D alignment, outperforming conventional baselines.
Dental3R: Geometry-Aware Pairing for Intraoral 3D Reconstruction from Sparse-View Photographs
Nov 18, 2025Intraoral 3D reconstruction is fundamental to digital orthodontics, yet conventional methods like intraoral scanning are inaccessible for remote tele-orthodontics, which typically relies on sparse smartphone imagery. While 3D Gaussian Splatting (3DGS) shows promise for novel view synthesis, its application to the standard clinical triad of unposed anterior and bilateral buccal photographs is challenging. The large view baselines, inconsistent illumination, and specular surfaces common in intraoral settings can destabilize simultaneous pose and geometry estimation. Furthermore, sparse-view photometric supervision often induces a frequency bias, leading to over-smoothed reconstructions that lose critical diagnostic details. To address these limitations, we propose \textbf{Dental3R}, a pose-free, graph-guided pipeline for robust, high-fidelity reconstruction from sparse intraoral photographs. Our method first constructs a Geometry-Aware Pairing Strategy (GAPS) to intelligently select a compact subgraph of high-value image pairs. The GAPS focuses on correspondence matching, thereby improving the stability of the geometry initialization and reducing memory usage. Building on the recovered poses and point cloud, we train the 3DGS model with a wavelet-regularized objective. By enforcing band-limited fidelity using a discrete wavelet transform, our approach preserves fine enamel boundaries and interproximal edges while suppressing high-frequency artifacts. We validate our approach on a large-scale dataset of 950 clinical cases and an additional video-based test set of 195 cases. Experimental results demonstrate that Dental3R effectively handles sparse, unposed inputs and achieves superior novel view synthesis quality for dental occlusion visualization, outperforming state-of-the-art methods.
ArchMap: Arch-Flattening and Knowledge-Guided Vision Language Model for Tooth Counting and Structured Dental Understanding
Nov 18, 2025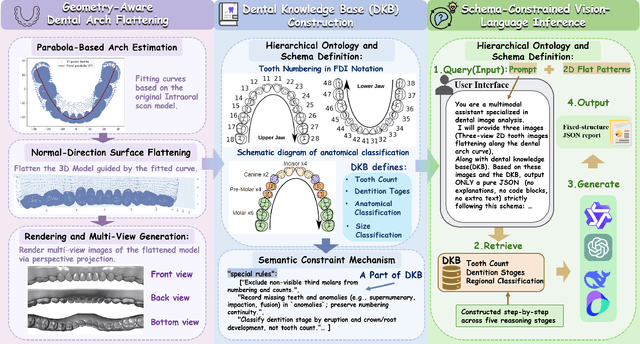
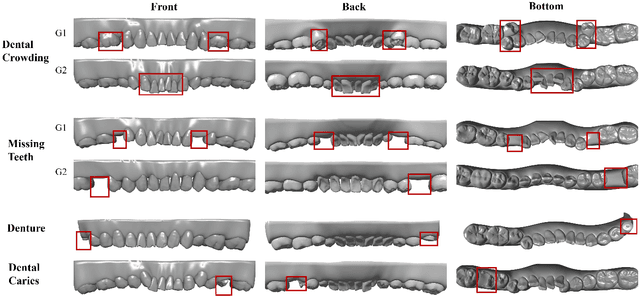
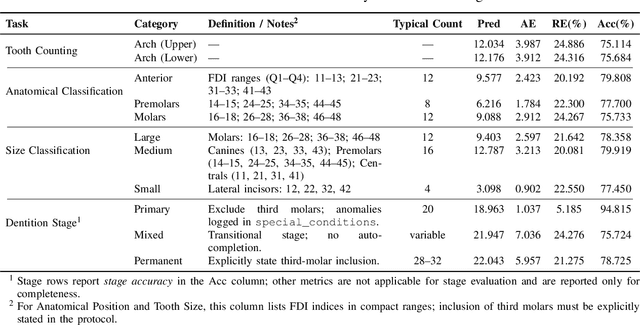
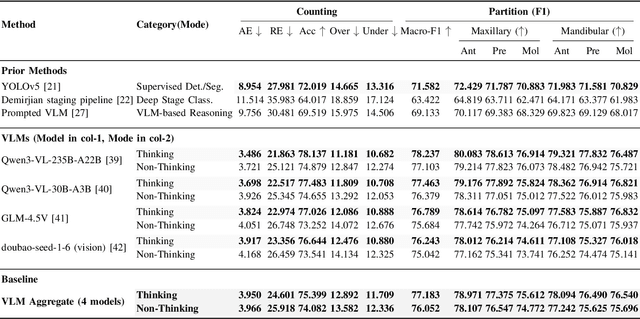
A structured understanding of intraoral 3D scans is essential for digital orthodontics. However, existing deep-learning approaches rely heavily on modality-specific training, large annotated datasets, and controlled scanning conditions, which limit generalization across devices and hinder deployment in real clinical workflows. Moreover, raw intraoral meshes exhibit substantial variation in arch pose, incomplete geometry caused by occlusion or tooth contact, and a lack of texture cues, making unified semantic interpretation highly challenging. To address these limitations, we propose ArchMap, a training-free and knowledge-guided framework for robust structured dental understanding. ArchMap first introduces a geometry-aware arch-flattening module that standardizes raw 3D meshes into spatially aligned, continuity-preserving multi-view projections. We then construct a Dental Knowledge Base (DKB) encoding hierarchical tooth ontology, dentition-stage policies, and clinical semantics to constrain the symbolic reasoning space. We validate ArchMap on 1060 pre-/post-orthodontic cases, demonstrating robust performance in tooth counting, anatomical partitioning, dentition-stage classification, and the identification of clinical conditions such as crowding, missing teeth, prosthetics, and caries. Compared with supervised pipelines and prompted VLM baselines, ArchMap achieves higher accuracy, reduced semantic drift, and superior stability under sparse or artifact-prone conditions. As a fully training-free system, ArchMap demonstrates that combining geometric normalization with ontology-guided multimodal reasoning offers a practical and scalable solution for the structured analysis of 3D intraoral scans in modern digital orthodontics.
EndoWave: Rational-Wavelet 4D Gaussian Splatting for Endoscopic Reconstruction
Oct 27, 2025In robot-assisted minimally invasive surgery, accurate 3D reconstruction from endoscopic video is vital for downstream tasks and improved outcomes. However, endoscopic scenarios present unique challenges, including photometric inconsistencies, non-rigid tissue motion, and view-dependent highlights. Most 3DGS-based methods that rely solely on appearance constraints for optimizing 3DGS are often insufficient in this context, as these dynamic visual artifacts can mislead the optimization process and lead to inaccurate reconstructions. To address these limitations, we present EndoWave, a unified spatio-temporal Gaussian Splatting framework by incorporating an optical flow-based geometric constraint and a multi-resolution rational wavelet supervision. First, we adopt a unified spatio-temporal Gaussian representation that directly optimizes primitives in a 4D domain. Second, we propose a geometric constraint derived from optical flow to enhance temporal coherence and effectively constrain the 3D structure of the scene. Third, we propose a multi-resolution rational orthogonal wavelet as a constraint, which can effectively separate the details of the endoscope and enhance the rendering performance. Extensive evaluations on two real surgical datasets, EndoNeRF and StereoMIS, demonstrate that our method EndoWave achieves state-of-the-art reconstruction quality and visual accuracy compared to the baseline method.
EMP: Enhance Memory in Data Pruning
Aug 28, 2024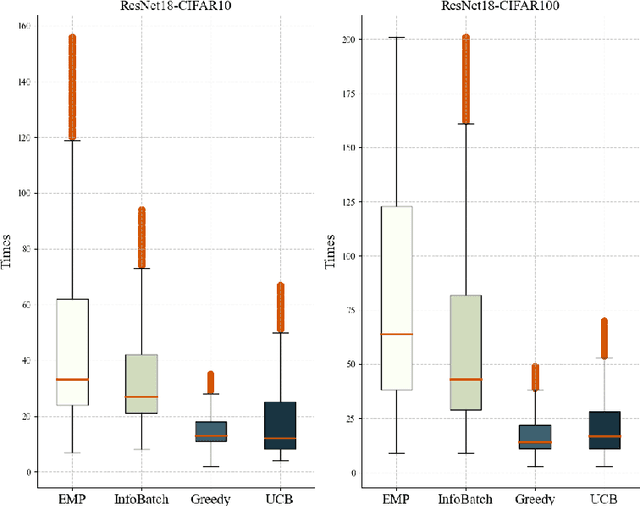
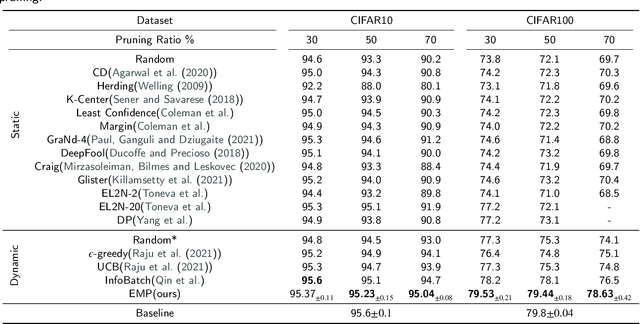
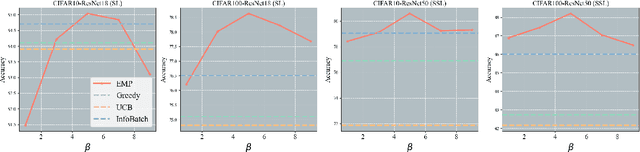

Recently, large language and vision models have shown strong performance, but due to high pre-training and fine-tuning costs, research has shifted towards faster training via dataset pruning. Previous methods used sample loss as an evaluation criterion, aiming to select the most "difficult" samples for training. However, when the pruning rate increases, the number of times each sample is trained becomes more evenly distributed, which causes many critical or general samples to not be effectively fitted. We refer to this as Low-Frequency Learning (LFL). In other words, LFL prevents the model from remembering most samples. In our work, we decompose the scoring function of LFL, provide a theoretical explanation for the inefficiency of LFL, and propose adding a memory term to the scoring function to enhance the model's memory capability, along with an approximation of this memory term. Similarly, we explore memory in Self-Supervised Learning (SSL), marking the first discussion on SSL memory. Using contrastive learning, we derive the memory term both theoretically and experimentally. Finally, we propose Enhance Memory Pruning (EMP), which addresses the issue of insufficient memory under high pruning rates by enhancing the model's memory of data, thereby improving its performance. We evaluated the performance of EMP in tasks such as image classification, natural language understanding, and model pre-training. The results show that EMP can improve model performance under extreme pruning rates. For example, in the CIFAR100-ResNet50 pre-training task, with 70\% pruning, EMP outperforms current methods by 2.2\%.
Mean Teacher based SSL Framework for Indoor Localization Using Wi-Fi RSSI Fingerprinting
Jul 18, 2024Wi-Fi fingerprinting is widely applied for indoor localization due to the widespread availability of Wi-Fi devices. However, traditional methods are not ideal for multi-building and multi-floor environments due to the scalability issues. Therefore, more and more researchers have employed deep learning techniques to enable scalable indoor localization. This paper introduces a novel semi-supervised learning framework for neural networks based on wireless access point selection, noise injection, and Mean Teacher model, which leverages unlabeled fingerprints to enhance localization performance. The proposed framework can manage hybrid in/outsourcing and voluntarily contributed databases and continually expand the fingerprint database with newly submitted unlabeled fingerprints during service. The viability of the proposed framework was examined using two established deep-learning models with the UJIIndoorLoc database. The experimental results suggest that the proposed framework significantly improves localization performance compared to the supervised learning-based approach in terms of floor-level coordinate estimation using EvAAL metric. It shows enhancements up to 10.99% and 8.98% in the former scenario and 4.25% and 9.35% in the latter, respectively with additional studies highlight the importance of the essential components of the proposed framework.
Hierarchical Stage-Wise Training of Linked Deep Neural Networks for Multi-Building and Multi-Floor Indoor Localization Based on Wi-Fi RSSI Fingerprinting
Jul 18, 2024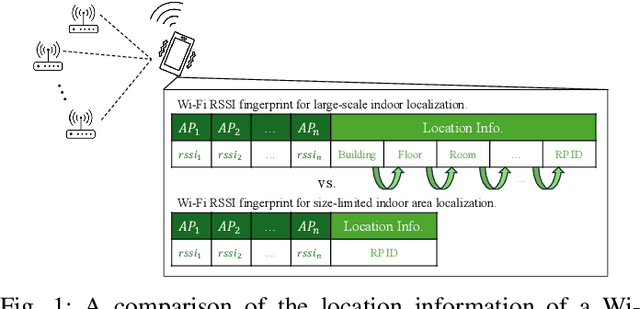
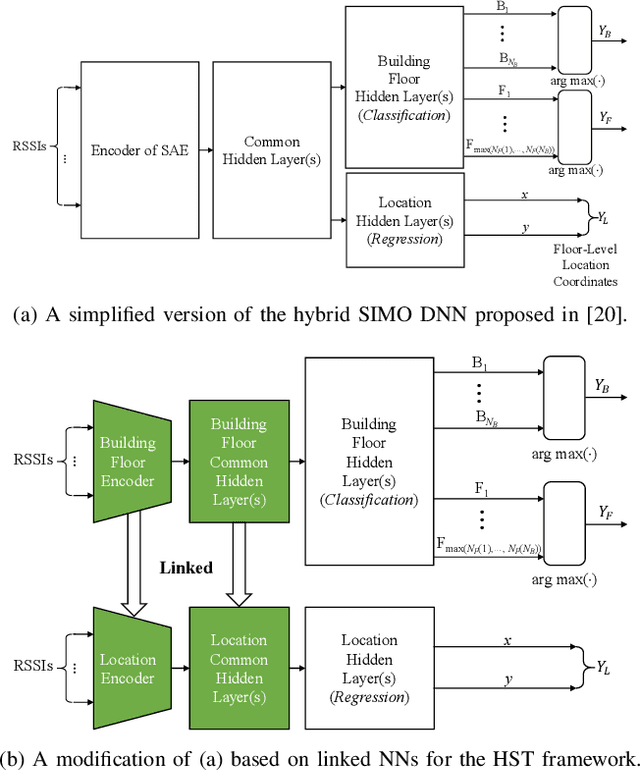
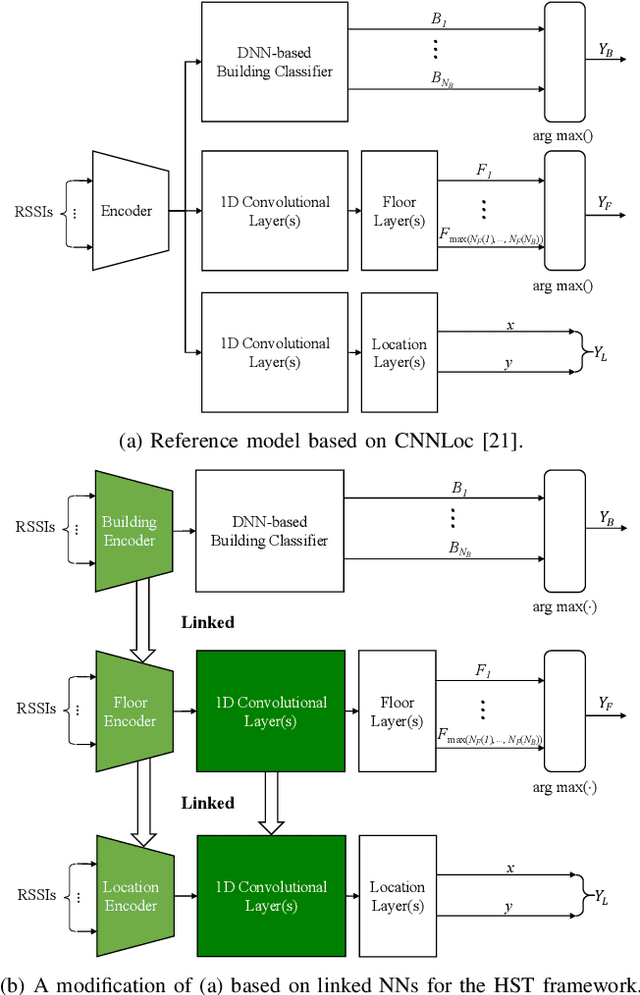
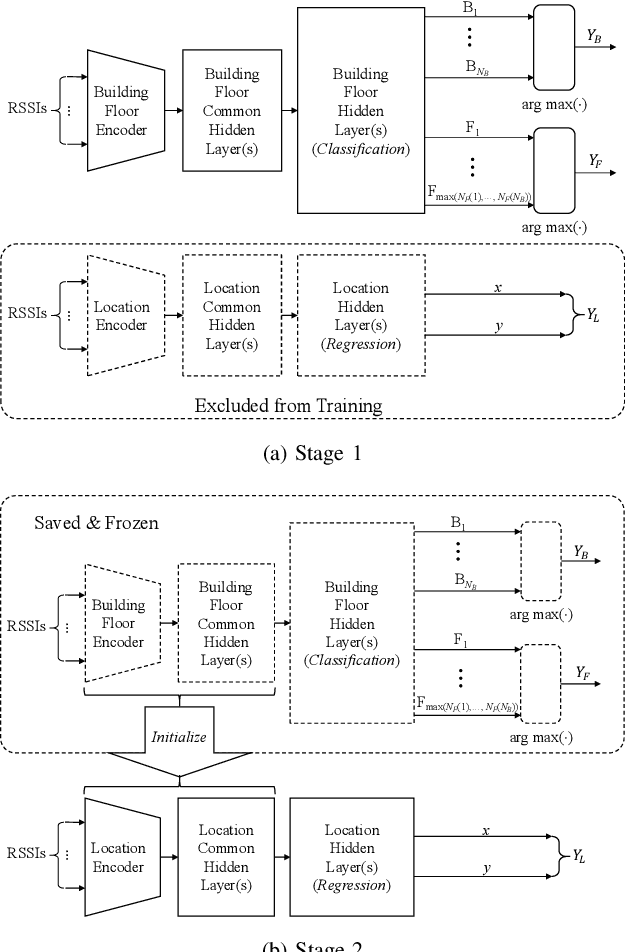
In this paper, we present a new solution to the problem of large-scale multi-building and multi-floor indoor localization based on linked neural networks, where each neural network is dedicated to a sub-problem and trained under a hierarchical stage-wise training framework. When the measured data from sensors have a hierarchical representation as in multi-building and multi-floor indoor localization, it is important to exploit the hierarchical nature in data processing to provide a scalable solution. In this regard, the hierarchical stage-wise training framework extends the original stage-wise training framework to the case of multiple linked networks by training a lower-hierarchy network based on the prior knowledge gained from the training of higher-hierarchy networks. The experimental results with the publicly-available UJIIndoorLoc multi-building and multi-floor Wi-Fi RSSI fingerprint database demonstrate that the linked neural networks trained under the proposed hierarchical stage-wise training framework can achieve a three-dimensional localization error of 8.19 m, which, to the best of the authors' knowledge, is the most accurate result ever obtained for neural network-based models trained and evaluated with the full datasets of the UJIIndoorLoc database, and that, when applied to a model based on hierarchical convolutional neural networks, the proposed training framework can also significantly reduce the three-dimensional localization error from 11.78 m to 8.71 m.
LNPT: Label-free Network Pruning and Training
Mar 20, 2024



Pruning before training enables the deployment of neural networks on smart devices. By retaining weights conducive to generalization, pruned networks can be accommodated on resource-constrained smart devices. It is commonly held that the distance on weight norms between the initialized and the fully-trained networks correlates with generalization performance. However, as we have uncovered, inconsistency between this metric and generalization during training processes, which poses an obstacle to determine the pruned structures on smart devices in advance. In this paper, we introduce the concept of the learning gap, emphasizing its accurate correlation with generalization. Experiments show that the learning gap, in the form of feature maps from the penultimate layer of networks, aligns with variations of generalization performance. We propose a novel learning framework, LNPT, which enables mature networks on the cloud to provide online guidance for network pruning and learning on smart devices with unlabeled data. Our results demonstrate the superiority of this approach over supervised training.
SEVEN: Pruning Transformer Model by Reserving Sentinels
Mar 19, 2024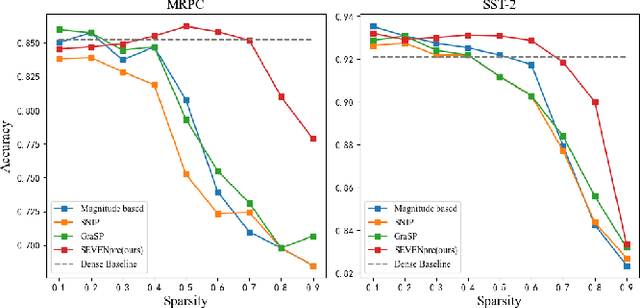
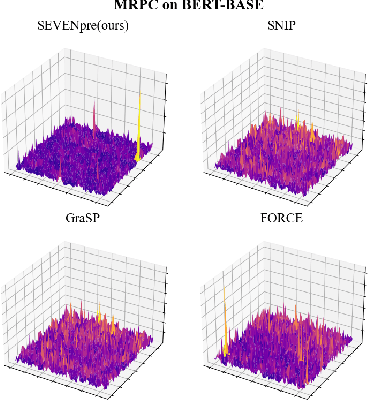
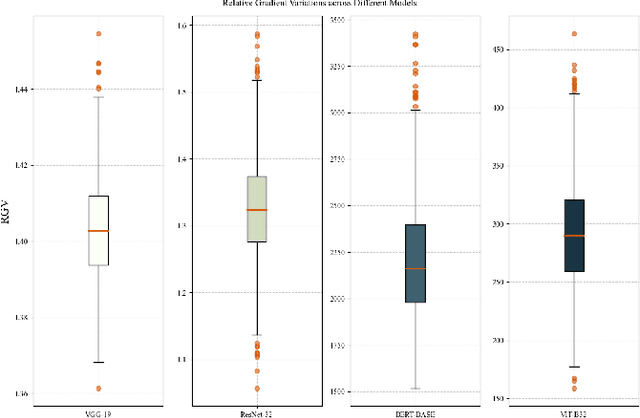
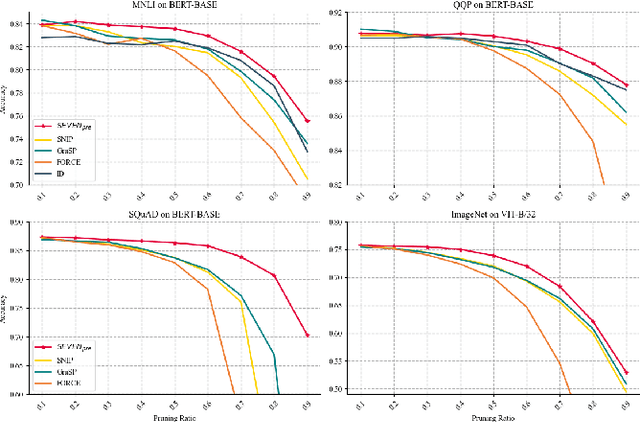
Large-scale Transformer models (TM) have demonstrated outstanding performance across various tasks. However, their considerable parameter size restricts their applicability, particularly on mobile devices. Due to the dynamic and intricate nature of gradients on TM compared to Convolutional Neural Networks, commonly used pruning methods tend to retain weights with larger gradient noise. This results in pruned models that are sensitive to sparsity and datasets, exhibiting suboptimal performance. Symbolic Descent (SD) is a general approach for training and fine-tuning TM. In this paper, we attempt to describe the noisy batch gradient sequences on TM through the cumulative process of SD. We utilize this design to dynamically assess the importance scores of weights.SEVEN is introduced by us, which particularly favors weights with consistently high sensitivity, i.e., weights with small gradient noise. These weights are tended to be preserved by SEVEN. Extensive experiments on various TM in natural language, question-answering, and image classification domains are conducted to validate the effectiveness of SEVEN. The results demonstrate significant improvements of SEVEN in multiple pruning scenarios and across different sparsity levels. Additionally, SEVEN exhibits robust performance under various fine-tuning strategies. The code is publicly available at https://github.com/xiaojinying/SEVEN.
Static vs. Dynamic Databases for Indoor Localization based on Wi-Fi Fingerprinting: A Discussion from a Data Perspective
Feb 20, 2024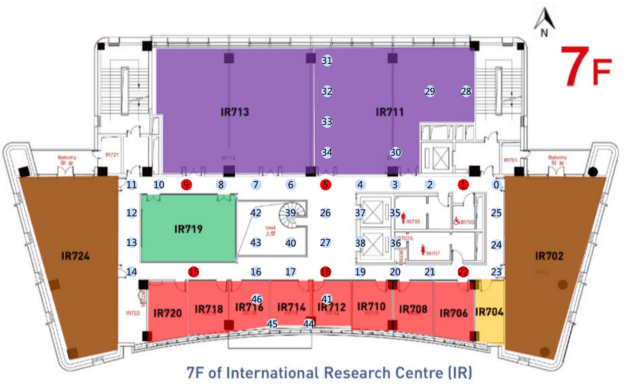
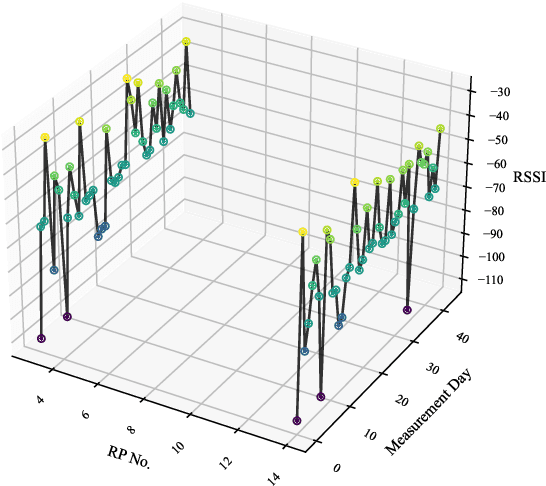
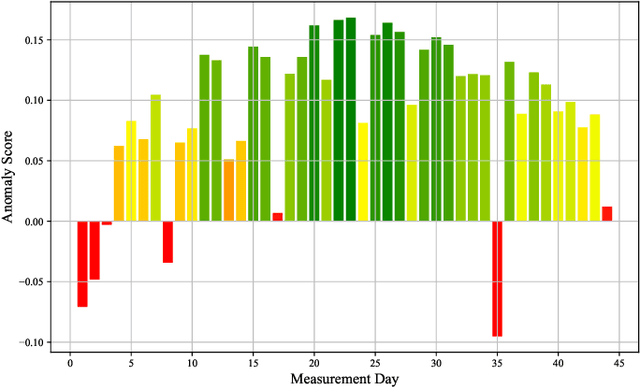
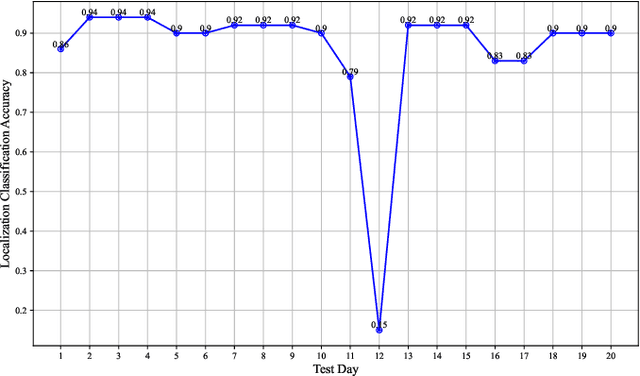
Wi-Fi fingerprinting has emerged as the most popular approach to indoor localization. The use of ML algorithms has greatly improved the localization performance of Wi-Fi fingerprinting, but its success depends on the availability of fingerprint databases composed of a large number of RSSIs, the MAC addresses of access points, and the other measurement information. However, most fingerprint databases do not reflect well the time varying nature of electromagnetic interferences in complicated modern indoor environment. This could result in significant changes in statistical characteristics of training/validation and testing datasets, which are often constructed at different times, and even the characteristics of the testing datasets could be different from those of the data submitted by users during the operation of localization systems after their deployment. In this paper, we consider the implications of time-varying Wi-Fi fingerprints on indoor localization from a data-centric point of view and discuss the differences between static and dynamic databases. As a case study, we have constructed a dynamic database covering three floors of the IR building of XJTLU based on RSSI measurements, over 44 days, and investigated the differences between static and dynamic databases in terms of statistical characteristics and localization performance. The analyses based on variance calculations and Isolation Forest show the temporal shifts in RSSIs, which result in a noticeable trend of the increase in the localization error of a Gaussian process regression model with the maximum error of 6.65 m after 14 days of training without model adjustments. The results of the case study with the XJTLU dynamic database clearly demonstrate the limitations of static databases and the importance of the creation and adoption of dynamic databases for future indoor localization research and real-world deployment.