 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Stage-Wise Training of Linked Deep Neural Networks for Multi-Building and Multi-Floor Indoor Localization Based on Wi-Fi RSSI Fingerprinting
Jul 18, 2024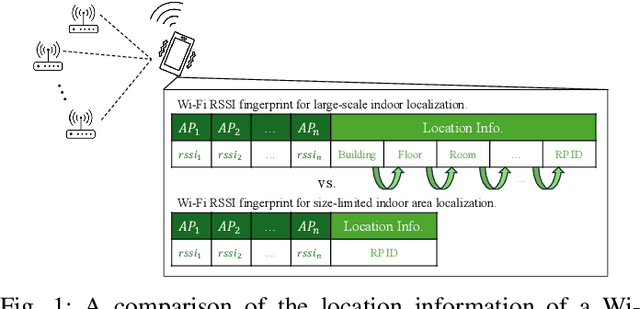
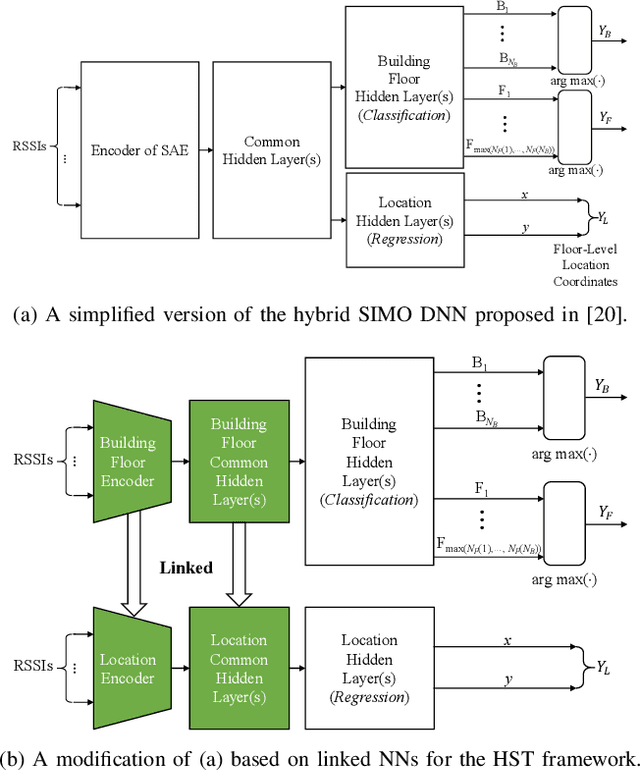
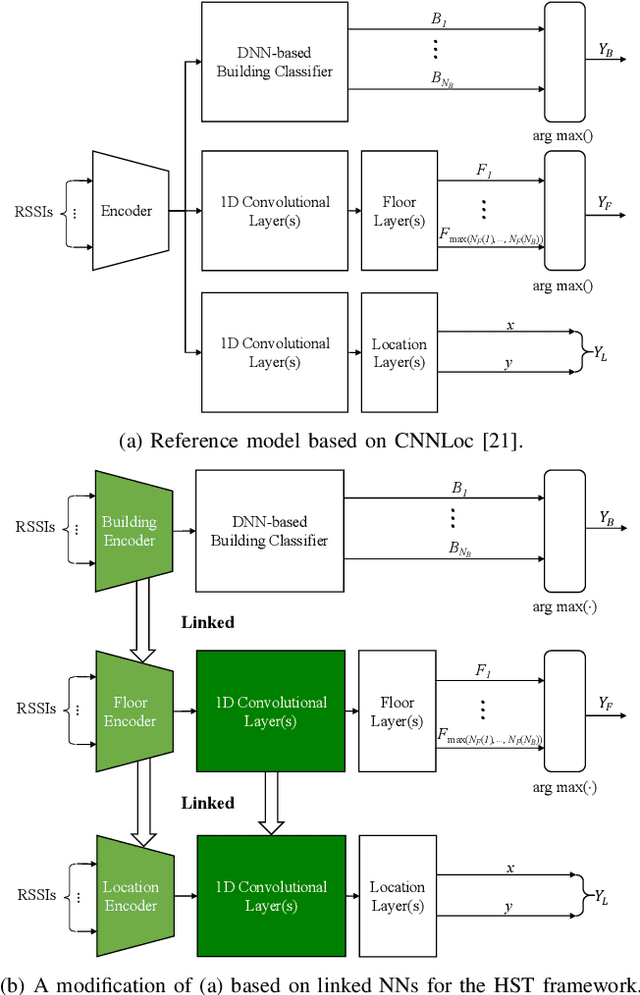
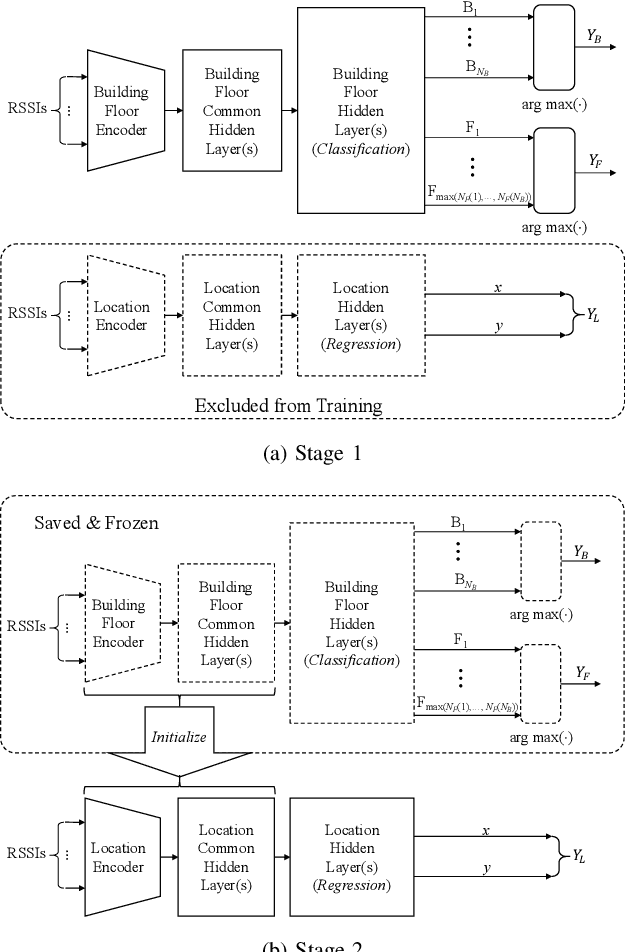
In this paper, we present a new solution to the problem of large-scale multi-building and multi-floor indoor localization based on linked neural networks, where each neural network is dedicated to a sub-problem and trained under a hierarchical stage-wise training framework. When the measured data from sensors have a hierarchical representation as in multi-building and multi-floor indoor localization, it is important to exploit the hierarchical nature in data processing to provide a scalable solution. In this regard, the hierarchical stage-wise training framework extends the original stage-wise training framework to the case of multiple linked networks by training a lower-hierarchy network based on the prior knowledge gained from the training of higher-hierarchy networks. The experimental results with the publicly-available UJIIndoorLoc multi-building and multi-floor Wi-Fi RSSI fingerprint database demonstrate that the linked neural networks trained under the proposed hierarchical stage-wise training framework can achieve a three-dimensional localization error of 8.19 m, which, to the best of the authors' knowledge, is the most accurate result ever obtained for neural network-based models trained and evaluated with the full datasets of the UJIIndoorLoc database, and that, when applied to a model based on hierarchical convolutional neural networks, the proposed training framework can also significantly reduce the three-dimensional localization error from 11.78 m to 8.71 m.
Mean Teacher based SSL Framework for Indoor Localization Using Wi-Fi RSSI Fingerprinting
Jul 18, 2024Wi-Fi fingerprinting is widely applied for indoor localization due to the widespread availability of Wi-Fi devices. However, traditional methods are not ideal for multi-building and multi-floor environments due to the scalability issues. Therefore, more and more researchers have employed deep learning techniques to enable scalable indoor localization. This paper introduces a novel semi-supervised learning framework for neural networks based on wireless access point selection, noise injection, and Mean Teacher model, which leverages unlabeled fingerprints to enhance localization performance. The proposed framework can manage hybrid in/outsourcing and voluntarily contributed databases and continually expand the fingerprint database with newly submitted unlabeled fingerprints during service. The viability of the proposed framework was examined using two established deep-learning models with the UJIIndoorLoc database. The experimental results suggest that the proposed framework significantly improves localization performance compared to the supervised learning-based approach in terms of floor-level coordinate estimation using EvAAL metric. It shows enhancements up to 10.99% and 8.98% in the former scenario and 4.25% and 9.35% in the latter, respectively with additional studies highlight the importance of the essential components of the proposed framework.
Static vs. Dynamic Databases for Indoor Localization based on Wi-Fi Fingerprinting: A Discussion from a Data Perspective
Feb 20, 2024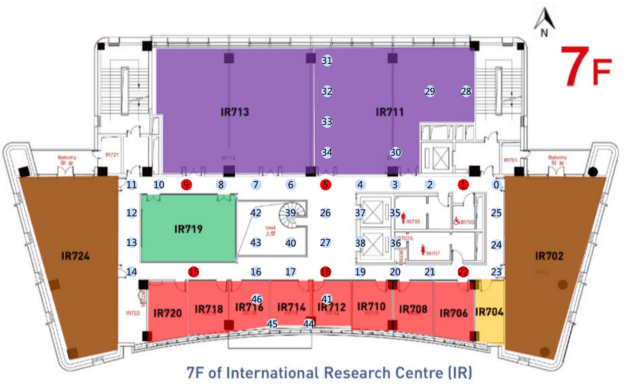
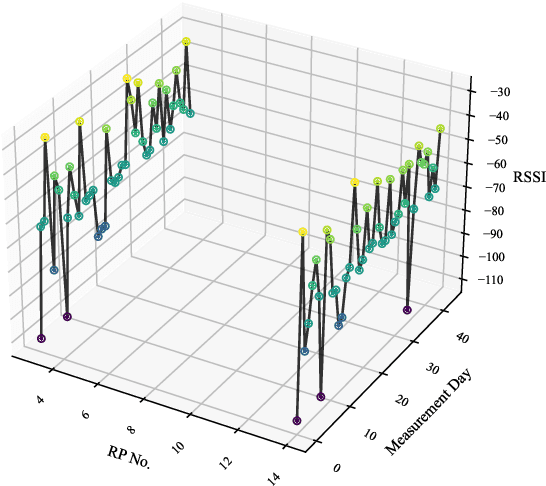
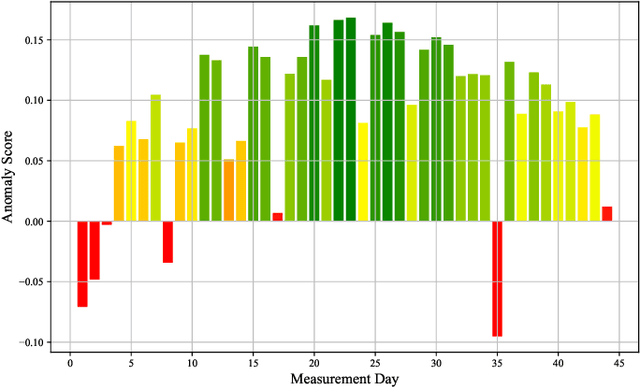
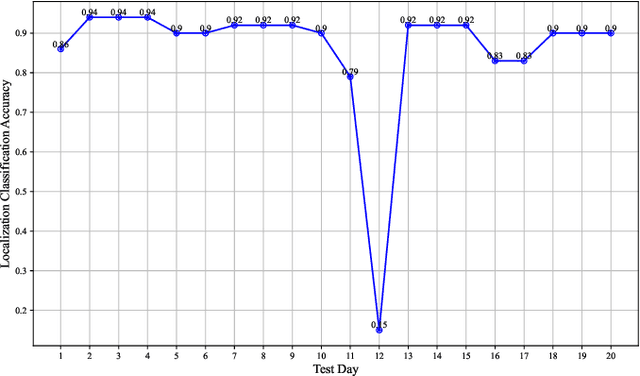
Wi-Fi fingerprinting has emerged as the most popular approach to indoor localization. The use of ML algorithms has greatly improved the localization performance of Wi-Fi fingerprinting, but its success depends on the availability of fingerprint databases composed of a large number of RSSIs, the MAC addresses of access points, and the other measurement information. However, most fingerprint databases do not reflect well the time varying nature of electromagnetic interferences in complicated modern indoor environment. This could result in significant changes in statistical characteristics of training/validation and testing datasets, which are often constructed at different times, and even the characteristics of the testing datasets could be different from those of the data submitted by users during the operation of localization systems after their deployment. In this paper, we consider the implications of time-varying Wi-Fi fingerprints on indoor localization from a data-centric point of view and discuss the differences between static and dynamic databases. As a case study, we have constructed a dynamic database covering three floors of the IR building of XJTLU based on RSSI measurements, over 44 days, and investigated the differences between static and dynamic databases in terms of statistical characteristics and localization performance. The analyses based on variance calculations and Isolation Forest show the temporal shifts in RSSIs, which result in a noticeable trend of the increase in the localization error of a Gaussian process regression model with the maximum error of 6.65 m after 14 days of training without model adjustments. The results of the case study with the XJTLU dynamic database clearly demonstrate the limitations of static databases and the importance of the creation and adoption of dynamic databases for future indoor localization research and real-world deployment.
On the Multidimensional Augmentation of Fingerprint Data for Indoor Localization in A Large-Scale Building Complex Based on Multi-Output Gaussian Process
Nov 19, 2022Wi-Fi fingerprinting becomes a dominant solution for large-scale indoor localization due to its major advantage of not requiring new infrastructure and dedicated devices. The number and the distribution of Reference Points (RPs) for the measurement of localization fingerprints like RSSI during the offline phase, however, greatly affects the localization accuracy; for instance, the UJIIndoorLoc is known to have the issue of uneven spatial distribution of RPs over buildings and floors. Data augmentation has been proposed as a feasible solution to not only improve the smaller number and the uneven distribution of RPs in the existing fingerprint databases but also reduce the labor and time costs of constructing new fingerprint databases. In this paper, we propose the multidimensional augmentation of fingerprint data for indoor localization in a large-scale building complex based on Multi-Output Gaussian Process (MOGP) and systematically investigate the impact of augmentation ratio as well as MOGP kernel functions and models with their hyperparameters on the performance of indoor localization using the UJIIndoorLoc database and the state-of-the-art neural network indoor localization model based on a hierarchical RNN. The investigation based on experimental results suggests that we can generate synthetic RSSI fingerprint data up to ten times the original data -- i.e., the augmentation ratio of 10 -- through the proposed multidimensional MOGP-based data augmentation without significantly affecting the indoor localization performance compared to that of the original data alone, which extends the spatial coverage of the combined RPs and thereby could improve the localization performance at the locations that are not part of the test dataset.
Multi-Output Gaussian Process-Based Data Augmentation for Multi-Building and Multi-Floor Indoor Localization
Feb 04, 2022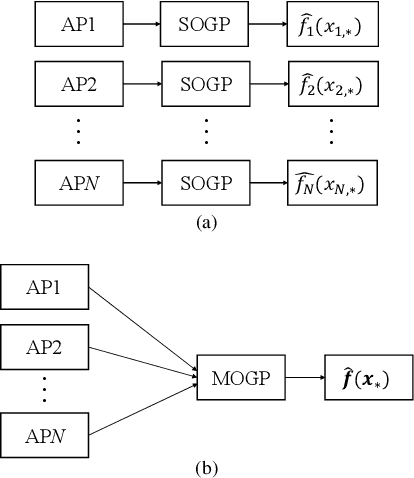
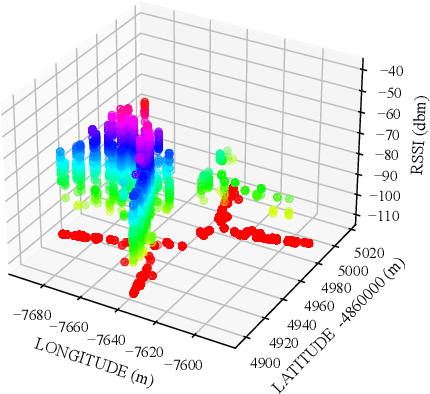
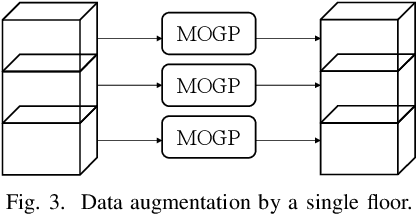
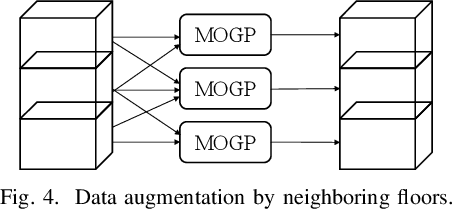
Location fingerprinting based on RSSI becomes a mainstream indoor localization technique due to its advantage of not requiring the installation of new infrastructure and the modification of existing devices, especially given the prevalence of Wi-Fi-enabled devices and the ubiquitous Wi-Fi access in modern buildings. The use of AI/ML technologies like DNNs makes location fingerprinting more accurate and reliable, especially for large-scale multi-building and multi-floor indoor localization. The application of DNNs for indoor localization, however, depends on a large amount of preprocessed and deliberately-labeled data for their training. Considering the difficulty of the data collection in an indoor environment, especially under the current epidemic situation of COVID-19, we investigate three different methods of RSSI data augmentation based on Multi-Output Gaussian Process (MOGP), i.e., by a single floor, by neighboring floors, and by a single building; unlike Single-Output Gaussian Process (SOGP), MOGP can take into account the correlation among RSSI observations from multiple Access Points (APs) deployed closely to each other (e.g., APs on the same floor of a building) by collectively handling them. The feasibility of the MOGP-based RSSI data augmentation is demonstrated through experiments based on the state-of-the-art RNN indoor localization model and the UJIIndoorLoc, i.e., the most popular publicly-available multi-building and multi-floor indoor localization database, where the RNN model trained with the UJIIndoorLoc database augmented by using the whole RSSI data of a building in fitting an MOGP model (i.e., by a single building) outperforms the other two augmentation methods as well as the RNN model trained with the original UJIIndoorLoc database, resulting in the mean three-dimensional positioning error of 8.42 m.