 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHODDI: A Dataset of High-Order Drug-Drug Interactions for Computational Pharmacovigilance
Feb 10, 2025
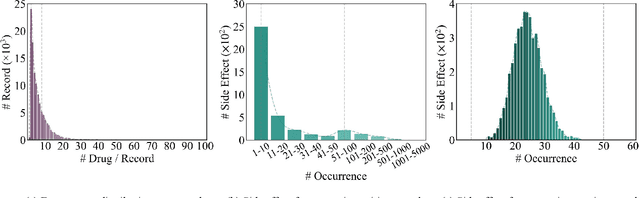
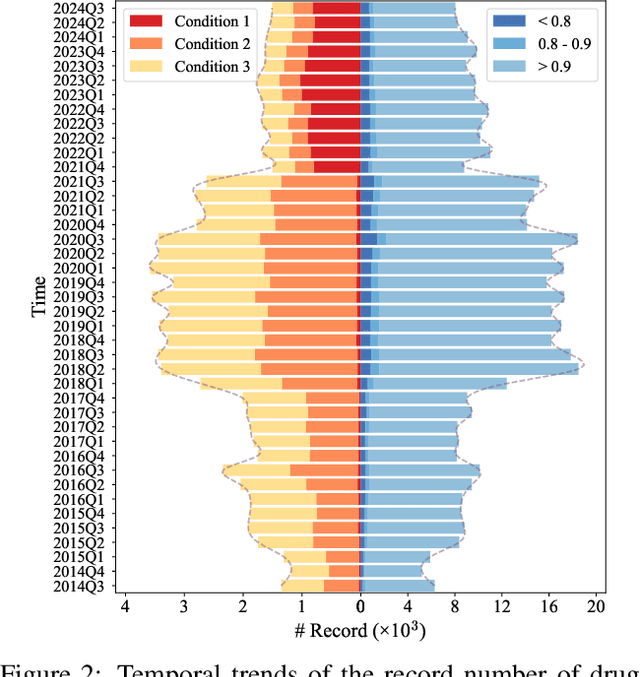
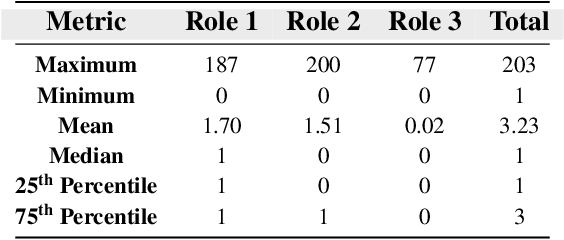
Drug-side effect research is vital for understanding adverse reactions arising in complex multi-drug therapies. However, the scarcity of higher-order datasets that capture the combinatorial effects of multiple drugs severely limits progress in this field. Existing resources such as TWOSIDES primarily focus on pairwise interactions. To fill this critical gap, we introduce HODDI, the first Higher-Order Drug-Drug Interaction Dataset, constructed from U.S. Food and Drug Administration (FDA) Adverse Event Reporting System (FAERS) records spanning the past decade, to advance computational pharmacovigilance. HODDI contains 109,744 records involving 2,506 unique drugs and 4,569 unique side effects, specifically curated to capture multi-drug interactions and their collective impact on adverse effects. Comprehensive statistical analyses demonstrate HODDI's extensive coverage and robust analytical metrics, making it a valuable resource for studying higher-order drug relationships. Evaluating HODDI with multiple models, we found that simple Multi-Layer Perceptron (MLP) can outperform graph models, while hypergraph models demonstrate superior performance in capturing complex multi-drug interactions, further validating HODDI's effectiveness. Our findings highlight the inherent value of higher-order information in drug-side effect prediction and position HODDI as a benchmark dataset for advancing research in pharmacovigilance, drug safety, and personalized medicine. The dataset and codes are available at https://github.com/TIML-Group/HODDI.
Particle-based Instance-aware Semantic Occupancy Mapping in Dynamic Environments
Sep 18, 2024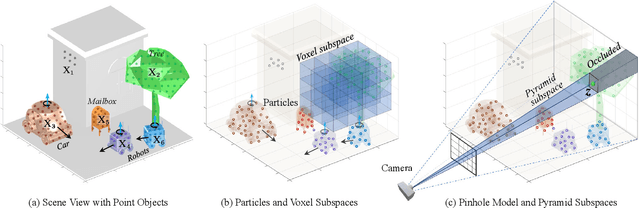
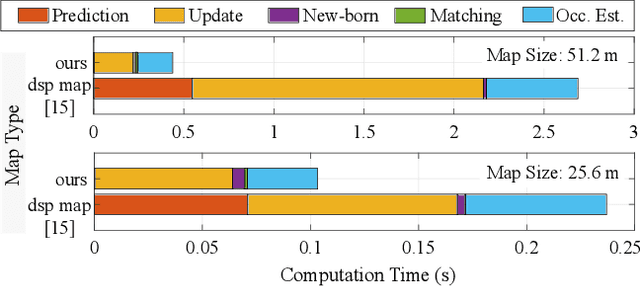
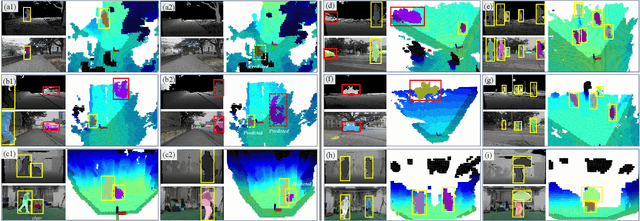
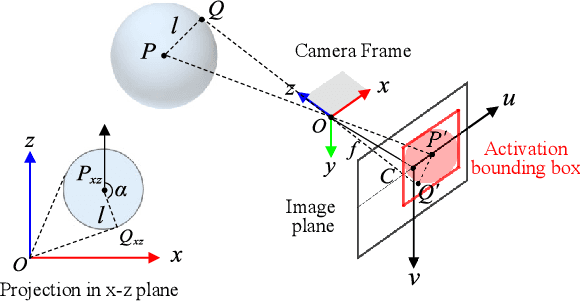
Representing the 3D environment with instance-aware semantic and geometric information is crucial for interaction-aware robots in dynamic environments. Nonetheless, creating such a representation poses challenges due to sensor noise, instance segmentation and tracking errors, and the objects' dynamic motion. This paper introduces a novel particle-based instance-aware semantic occupancy map to tackle these challenges. Particles with an augmented instance state are used to estimate the Probability Hypothesis Density (PHD) of the objects and implicitly model the environment. Utilizing a State-augmented Sequential Monte Carlo PHD (S$^2$MC-PHD) filter, these particles are updated to jointly estimate occupancy status, semantic, and instance IDs, mitigating noise. Additionally, a memory module is adopted to enhance the map's responsiveness to previously observed objects. Experimental results on the Virtual KITTI 2 dataset demonstrate that the proposed approach surpasses state-of-the-art methods across multiple metrics under different noise conditions. Subsequent tests using real-world data further validate the effectiveness of the proposed approach.
Real-Time Estimation of Relative Pose for UAVs Using a Dual-Channel Feature Association
Feb 27, 2024Leveraging multiple cameras on Unmanned Aerial Vehicles (UAVs) to form a variable-baseline stereo camera for collaborative perception is highly promising. The critical steps include high-rate cross-camera feature association and frame-rate relative pose estimation of multiple UAVs. To accelerate the feature association rate to match the frame rate, we propose a dual-channel structure to decouple the time-consuming feature detection and match from the high-rate image stream. The novel design of periodic guidance and fast prediction effectively utilizes each image frame to achieve a frame-rate feature association. Real-world experiments are executed using SuperPoint and SuperGlue on the NVIDIA NX 8G platform with a 30 Hz image stream. Using single-channel SuperPoint and SuperGlue can only achieve 13 Hz feature association. The proposed dual-channel method can improve the rate of feature association from 13 Hz to 30 Hz, supporting the frame-rate requirement. To accommodate the proposed feature association, we develop a Multi-State Constrained Kalman Filter (MSCKF)-based relative pose estimator in the back-end by fusing the local odometry from two UAVs together with the measurements of common features. Experiments show that the dual-channel feature association improves the rate of visual observation and enhances the real-time performance of back-end estimator compared to the existing methods. Video - https://youtu.be/UBAR1iP0GPk Supplementary video - https://youtu.be/nPq8EpVzJZM
Perching on Moving Inclined Surfaces using Uncertainty Tolerant Planner and Thrust Regulation
Dec 21, 2022Quadrotors with the ability to perch on moving inclined surfaces can save energy and extend their travel distance by leveraging ground vehicles. Achieving dynamic perching places high demands on the performance of trajectory planning and terminal state accuracy in SE(3). However, in the perching process, uncertainties in target surface prediction, tracking control and external disturbances may cause trajectory planning failure or lead to unacceptable terminal errors. To address these challenges, we first propose a trajectory planner that considers adaptation to uncertainties in target prediction and tracking control. To facilitate this work, the reachable set of quadrotors' states is first analyzed. The states whose reachable sets possess the largest coverage probability for uncertainty targets, are defined as optimal waypoints. Subsequently, an approach to seek local optimal waypoints for static and moving uncertainty targets is proposed. A real-time trajectory planner based on optimized waypoints is developed accordingly. Secondly, thrust regulation is also implemented in the terminal attitude tracking stage to handle external disturbances. When a quadrotor's attitude is commanded to align with target surfaces, the thrust is optimized to minimize terminal errors. This makes the terminal position and velocity be controlled in closed-loop manner. Therefore, the resistance to disturbances and terminal accuracy is improved. Extensive simulation experiments demonstrate that our methods can improve the accuracy of terminal states under uncertainties. The success rate is approximately increased by $50\%$ compared to the two-end planner without thrust regulation. Perching on the rear window of a car is also achieved using our proposed heterogeneous cooperation system outdoors. This validates the feasibility and practicality of our methods.
Hitchhiker: A Quadrotor Aggressively Perching on a Moving Inclined Surface Using Compliant Suction Cup Gripper
Mar 04, 2022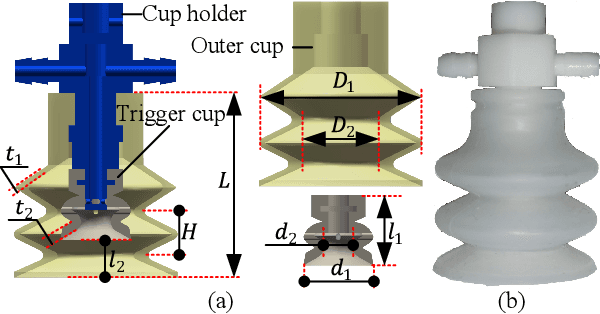
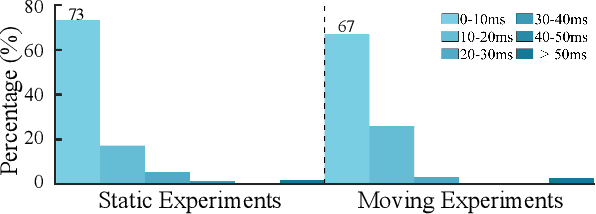
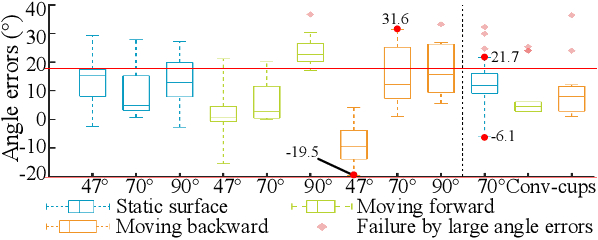
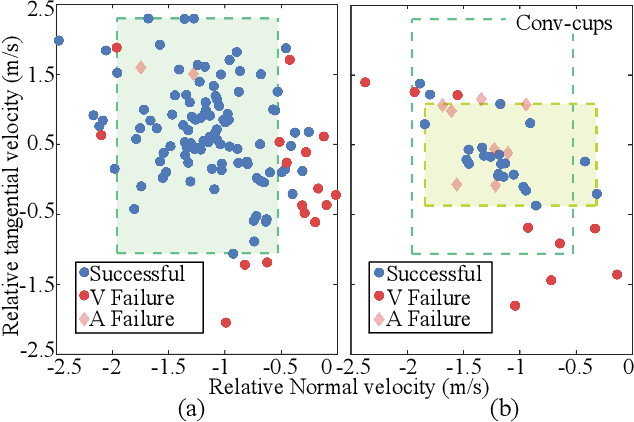
Perching on surfaces of moving objects, like vehicles, could extend the flight times and range of quadrotors. For surfaces attachment, suction cups are usually adopted due to their durability and large adhesion force. To seal on surfaces, suction cups are required to be aligned with surfaces and match to the frictions on end faces induced by relative tangential velocity. However, when the object surface is moving and inclined such that an aggressive maneuver is required, the attitude and relative velocity errors of quadrotors would become significant, which poses challenges to perch. To address the problem, we proposed a real-time trajectory planning algorithm to alleviate the velocity errors of quadrotors relative to moving surfaces. Multimodal search in dynamic time-domain is developed in the algorithm and thus the time-optimal aggressive trajectories can be efficiently generated. To further adapt to the residual attitude and relative velocity errors, we design a compliant gripper using self-sealing cups. Multiple cups in different directions are integrated into a wheel-like mechanism to increase the tolerance to attitude errors. The wheel mechanism in the gripper also eliminates the requirement of matching the attitude and tangential velocity and thus increases the adaptability to tangential velocity. Extensive tests are conducted, including comparison experiments, to perch on static and moving surfaces at various inclinations. Results demonstrate that our proposed system enables a quadrotor to reliably perch on static and moving inclined (up to 1.18$m/s$ and 90$^\circ$) surfaces with a success rate of 70\% or higher. The trajectory planner is valid and efficient. Compared to conventional suction cup grippers in moving surface perching, our gripper has larger adaptability to attitude errors and tangential velocities, and the success rate increases by 45\%.