 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerching on Moving Inclined Surfaces using Uncertainty Tolerant Planner and Thrust Regulation
Dec 21, 2022Quadrotors with the ability to perch on moving inclined surfaces can save energy and extend their travel distance by leveraging ground vehicles. Achieving dynamic perching places high demands on the performance of trajectory planning and terminal state accuracy in SE(3). However, in the perching process, uncertainties in target surface prediction, tracking control and external disturbances may cause trajectory planning failure or lead to unacceptable terminal errors. To address these challenges, we first propose a trajectory planner that considers adaptation to uncertainties in target prediction and tracking control. To facilitate this work, the reachable set of quadrotors' states is first analyzed. The states whose reachable sets possess the largest coverage probability for uncertainty targets, are defined as optimal waypoints. Subsequently, an approach to seek local optimal waypoints for static and moving uncertainty targets is proposed. A real-time trajectory planner based on optimized waypoints is developed accordingly. Secondly, thrust regulation is also implemented in the terminal attitude tracking stage to handle external disturbances. When a quadrotor's attitude is commanded to align with target surfaces, the thrust is optimized to minimize terminal errors. This makes the terminal position and velocity be controlled in closed-loop manner. Therefore, the resistance to disturbances and terminal accuracy is improved. Extensive simulation experiments demonstrate that our methods can improve the accuracy of terminal states under uncertainties. The success rate is approximately increased by $50\%$ compared to the two-end planner without thrust regulation. Perching on the rear window of a car is also achieved using our proposed heterogeneous cooperation system outdoors. This validates the feasibility and practicality of our methods.
Hitchhiker: A Quadrotor Aggressively Perching on a Moving Inclined Surface Using Compliant Suction Cup Gripper
Mar 04, 2022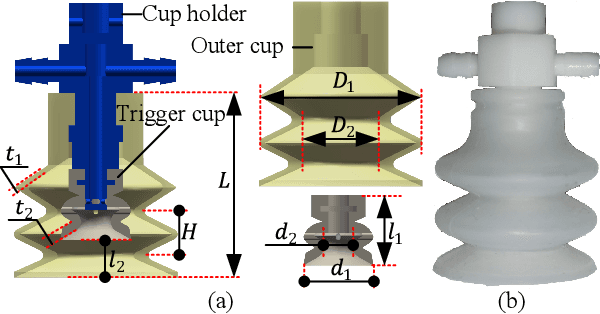
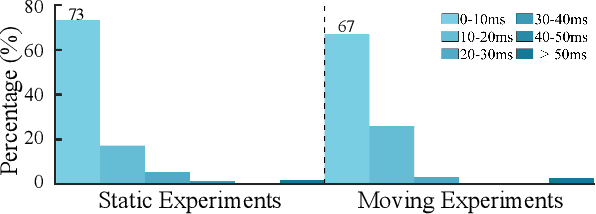
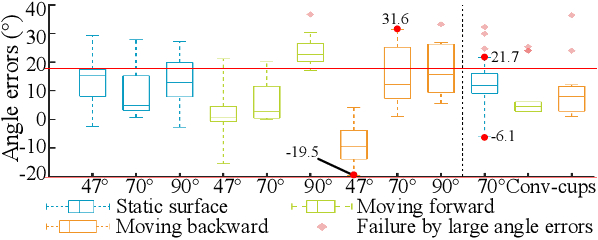
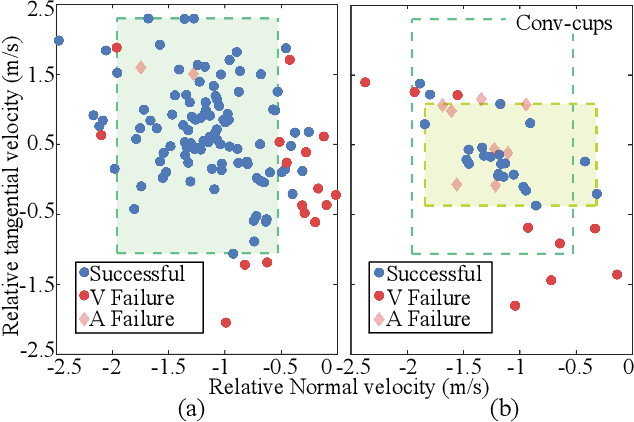
Perching on surfaces of moving objects, like vehicles, could extend the flight times and range of quadrotors. For surfaces attachment, suction cups are usually adopted due to their durability and large adhesion force. To seal on surfaces, suction cups are required to be aligned with surfaces and match to the frictions on end faces induced by relative tangential velocity. However, when the object surface is moving and inclined such that an aggressive maneuver is required, the attitude and relative velocity errors of quadrotors would become significant, which poses challenges to perch. To address the problem, we proposed a real-time trajectory planning algorithm to alleviate the velocity errors of quadrotors relative to moving surfaces. Multimodal search in dynamic time-domain is developed in the algorithm and thus the time-optimal aggressive trajectories can be efficiently generated. To further adapt to the residual attitude and relative velocity errors, we design a compliant gripper using self-sealing cups. Multiple cups in different directions are integrated into a wheel-like mechanism to increase the tolerance to attitude errors. The wheel mechanism in the gripper also eliminates the requirement of matching the attitude and tangential velocity and thus increases the adaptability to tangential velocity. Extensive tests are conducted, including comparison experiments, to perch on static and moving surfaces at various inclinations. Results demonstrate that our proposed system enables a quadrotor to reliably perch on static and moving inclined (up to 1.18$m/s$ and 90$^\circ$) surfaces with a success rate of 70\% or higher. The trajectory planner is valid and efficient. Compared to conventional suction cup grippers in moving surface perching, our gripper has larger adaptability to attitude errors and tangential velocities, and the success rate increases by 45\%.
An Efficient Egocentric Regulator for Continuous Targeting Problems of the Underactuated Quadrotor
Aug 06, 2021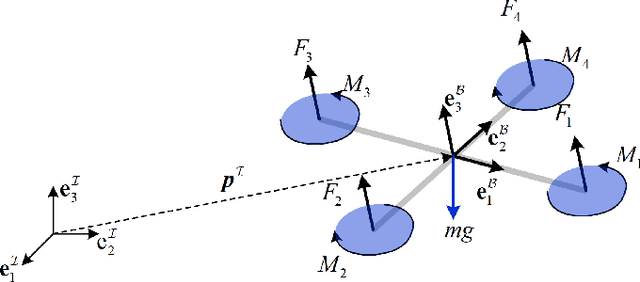
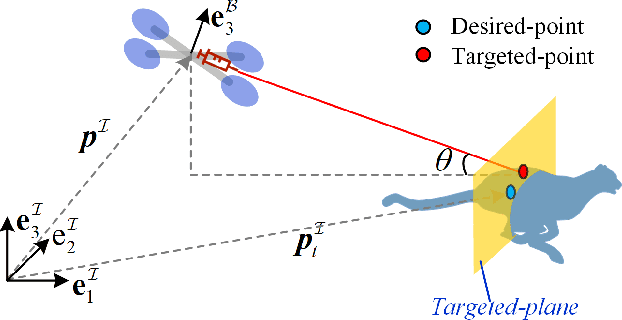
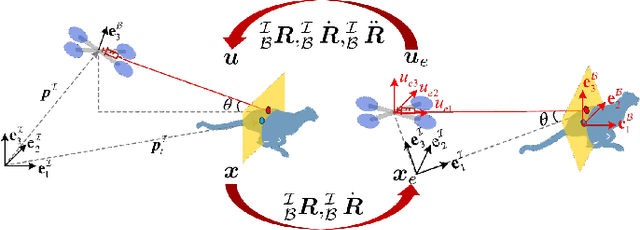
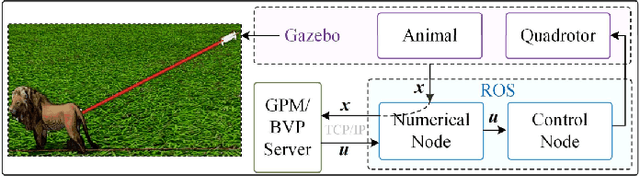
Flying robots such as the quadrotor could provide an efficient approach for medical treatment or sensor placing of wild animals. In these applications, continuously targeting the moving animal is a crucial requirement. Due to the underactuated characteristics of the quadrotor and the coupled kinematics with the animal, nonlinear optimal tracking approaches, other than smooth feedback control, are required. However, with severe nonlinearities, it would be time-consuming to evaluate control inputs, and real-time tracking may not be achieved with generic optimizers onboard. To tackle this problem, a novel efficient egocentric regulation approach with high computational efficiency is proposed in this paper. Specifically, it directly formulates the optimal tracking problem in an egocentric manner regarding the quadrotor's body coordinates. Meanwhile, the nonlinearities of the system are peeled off through a mapping of the feedback states as well as control inputs, between the inertial and body coordinates. In this way, the proposed efficient egocentric regulator only requires solving a quadratic performance objective with linear constraints and then generate control inputs analytically. Comparative simulations and mimic biological experiment are carried out to verify the effectiveness and computational efficiency. Results demonstrate that the proposed control approach presents the highest and stablest computational efficiency than generic optimizers on different platforms. Particularly, on a commonly utilized onboard computer, our method can compute the control action in approximately 0.3 ms, which is on the order of 350 times faster than that of generic nonlinear optimizers, establishing a control frequency around 3000 Hz.