 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Egocentric Regulator for Continuous Targeting Problems of the Underactuated Quadrotor
Paper and Code
Aug 06, 2021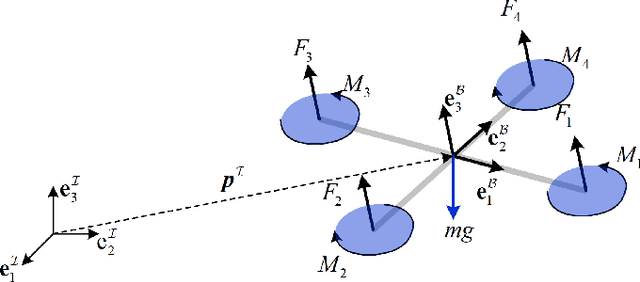
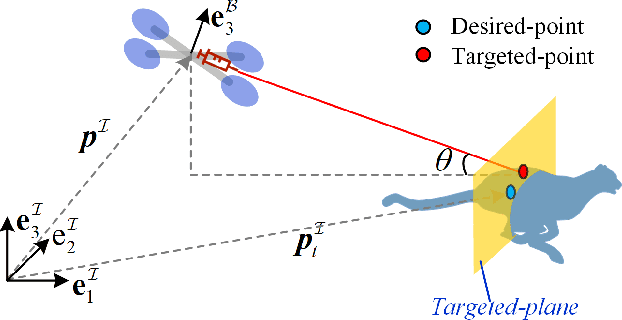
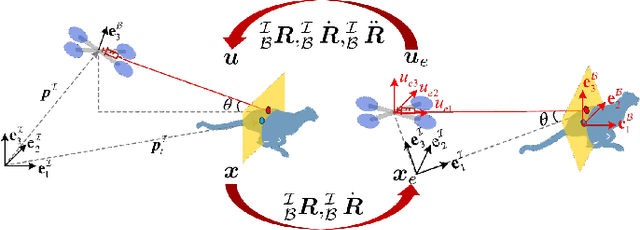
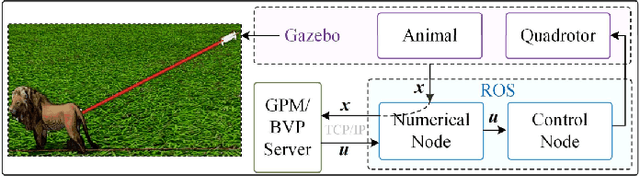
Flying robots such as the quadrotor could provide an efficient approach for medical treatment or sensor placing of wild animals. In these applications, continuously targeting the moving animal is a crucial requirement. Due to the underactuated characteristics of the quadrotor and the coupled kinematics with the animal, nonlinear optimal tracking approaches, other than smooth feedback control, are required. However, with severe nonlinearities, it would be time-consuming to evaluate control inputs, and real-time tracking may not be achieved with generic optimizers onboard. To tackle this problem, a novel efficient egocentric regulation approach with high computational efficiency is proposed in this paper. Specifically, it directly formulates the optimal tracking problem in an egocentric manner regarding the quadrotor's body coordinates. Meanwhile, the nonlinearities of the system are peeled off through a mapping of the feedback states as well as control inputs, between the inertial and body coordinates. In this way, the proposed efficient egocentric regulator only requires solving a quadratic performance objective with linear constraints and then generate control inputs analytically. Comparative simulations and mimic biological experiment are carried out to verify the effectiveness and computational efficiency. Results demonstrate that the proposed control approach presents the highest and stablest computational efficiency than generic optimizers on different platforms. Particularly, on a commonly utilized onboard computer, our method can compute the control action in approximately 0.3 ms, which is on the order of 350 times faster than that of generic nonlinear optimizers, establishing a control frequency around 3000 Hz.