 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Design of A Haptic Unit for Vibrotactile Amplitude Modulation
Sep 13, 2024Communicating information to users is a crucial aspect of human-machine interaction. Vibrotactile feedback encodes information into spatiotemporal vibrations, enabling users to perceive tactile sensations. It offers advantages such as lightweight, wearability, and high stability, with broad applications in sensory substitution, virtual reality, education, and healthcare. However, existing haptic unit designs lack amplitude modulation capabilities, which limits their applications. This paper proposed an optimized design of the haptic unit from the perspective of vibration amplitude modulation. A modified elastic model was developed to describe the propagation and attenuation mechanisms of vibration in the skin. Based on the model, two types of hierarchical architectural design were proposed. The design incorporated various materials arranged in multiple layers to amplify or attenuate the vibration amplitude as it traveled through the structure. An experimental platform was built to evaluate the performance of the optimized design.
Farthest Streamline Sampling for the Uniform Distribution of Forearm Muscle Fiber Tracts from Diffusion Tensor Imaging
Jun 24, 2023



Background: Diffusion tensor imaging (DTI) has been used to characterize forearm muscle architecture. Since only uniform sampling is performed for seed points rather than fiber tracts, the tracts may be unevenly distributed in the muscle volume. Purpose: To reconstruct uniformly distributed fiber tracts in human forearm by filtering the tracts from DTI. Assessment: Farthest streamline sampling (FSS) was proposed for filtering and compared with two conventional methods, i.e., two-dimensional sampling and three-dimensional sampling. The uniform coverage performance of the methods was evaluated by streamline coverage (SC) and the coefficient of variation of streamline density (SDCV). Architectural parameters were calculated for 17 forearm muscles. Anatomical correctness was verified by 1. visually assessing the fiber orientation, 2. checking whether the architectural parameters were within physiological ranges, and 3. classifying the architectural types. Results: FSS had the highest SC (0.93+0.04) and the lowest SDCV (0.34+0.06) among the three methods (P<0.05). FSS reduced the sampling of long tracts (10% reduction in fiber length, P<0.05), and the architectural parameters were within physiological ranges (two parameters with P<0.05). The fiber orientation of the tractography was visually consistent with that of the cadaveric specimen. The architectural types of 16 muscles were correctly classified, except for the palmaris longus, which had a linear arrangement of fiber endpoints (R2=0.95+0.02, P<0.001). Data Conclusion: FSS reconstructed more muscle regions and uniformly distributed fiber tracts. The tracts were anatomically correct, indicating the validity of fiber tracts. Key Words: diffusion tensor imaging; forearm muscles; architectural properties
Perching on Moving Inclined Surfaces using Uncertainty Tolerant Planner and Thrust Regulation
Dec 21, 2022Quadrotors with the ability to perch on moving inclined surfaces can save energy and extend their travel distance by leveraging ground vehicles. Achieving dynamic perching places high demands on the performance of trajectory planning and terminal state accuracy in SE(3). However, in the perching process, uncertainties in target surface prediction, tracking control and external disturbances may cause trajectory planning failure or lead to unacceptable terminal errors. To address these challenges, we first propose a trajectory planner that considers adaptation to uncertainties in target prediction and tracking control. To facilitate this work, the reachable set of quadrotors' states is first analyzed. The states whose reachable sets possess the largest coverage probability for uncertainty targets, are defined as optimal waypoints. Subsequently, an approach to seek local optimal waypoints for static and moving uncertainty targets is proposed. A real-time trajectory planner based on optimized waypoints is developed accordingly. Secondly, thrust regulation is also implemented in the terminal attitude tracking stage to handle external disturbances. When a quadrotor's attitude is commanded to align with target surfaces, the thrust is optimized to minimize terminal errors. This makes the terminal position and velocity be controlled in closed-loop manner. Therefore, the resistance to disturbances and terminal accuracy is improved. Extensive simulation experiments demonstrate that our methods can improve the accuracy of terminal states under uncertainties. The success rate is approximately increased by $50\%$ compared to the two-end planner without thrust regulation. Perching on the rear window of a car is also achieved using our proposed heterogeneous cooperation system outdoors. This validates the feasibility and practicality of our methods.
Human Biophysics as Network Weights: Conditional Generative Models for Ultra-fast Simulation
Nov 03, 2022



Simulations of biophysical systems have provided a huge contribution to our fundamental understanding of human physiology and remain a central pillar for developments in medical devices and human machine interfaces. However, despite their successes, such simulations usually rely on highly computationally expensive numerical modelling, which is often inefficient to adapt to new simulation parameters. This limits their use in dynamic models of human behavior, for example in modelling the electric fields generated by muscles in a moving arm. We propose the alternative approach to use conditional generative models, which can learn complex relationships between the underlying generative conditions whilst remaining inexpensive to sample from. As a demonstration of this concept, we present BioMime, a hybrid architecture that combines elements of deep latent variable models and conditional adversarial training to construct a generative model that can both transform existing data samples to reflect new modelling assumptions and sample new data from a conditioned distribution. We demonstrate that BioMime can learn to accurately mimic a complex numerical model of human muscle biophysics and then use this knowledge to continuously sample from a dynamically changing system in real-time. We argue that transfer learning approaches with conditional generative models are a viable solution for dynamic simulation with any numerical model.
Hierarchical Motion Planning Framework for Cooperative Transportation of Multiple Mobile Manipulators
Aug 17, 2022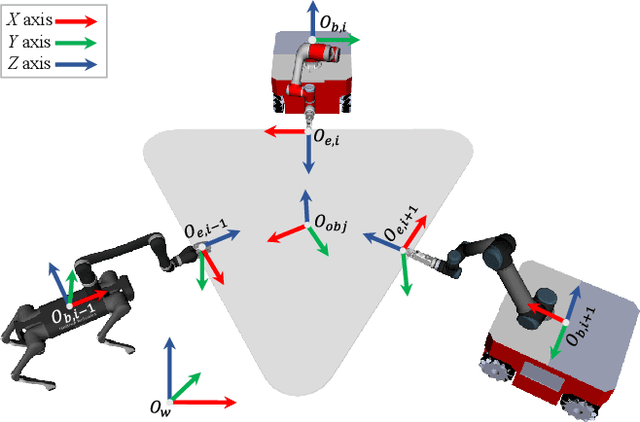
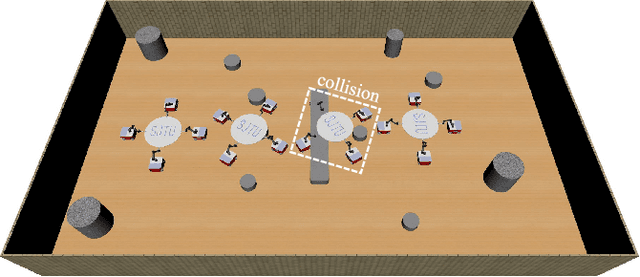
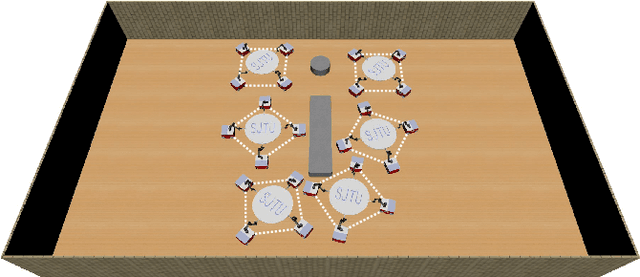
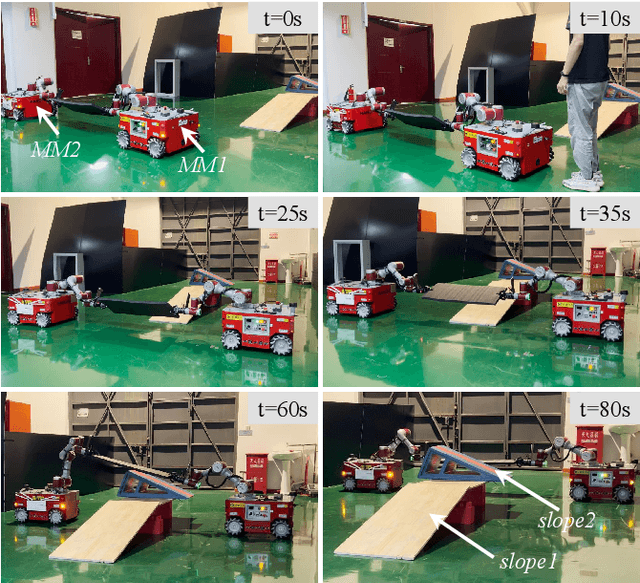
Multiple mobile manipulators show superiority in the tasks requiring mobility and dexterity compared with a single robot, especially when manipulating/transporting bulky objects. When the object and the manipulators are rigidly connected, closed-chain will form and the motion of the whole system will be restricted onto a lower-dimensional manifold. However, current research on multi-robot motion planning did not fully consider the formation of the whole system, the redundancy of the mobile manipulator and obstacles in the environment, which make the tasks challenging. Therefore, this paper proposes a hierarchical framework to efficiently solve the above challenges, where the centralized layer plans the object's motion offline and the decentralized layer independently explores the redundancy of each robot in real-time. In addition, closed-chain, obstacle-avoidance and the lower bound of the formation constraints are guaranteed in the centralized layer, which cannot be achieved simultaneously by other planners. Moreover, capability map, which represents the distribution of the formation constraint, is applied to speed up the two layers. Both simulation and experimental results show that the proposed framework outperforms the benchmark planners significantly. The system could bypass or cross obstacles in cluttered environments, and the framework can be applied to different numbers of heterogeneous mobile manipulators.
Hitchhiker: A Quadrotor Aggressively Perching on a Moving Inclined Surface Using Compliant Suction Cup Gripper
Mar 04, 2022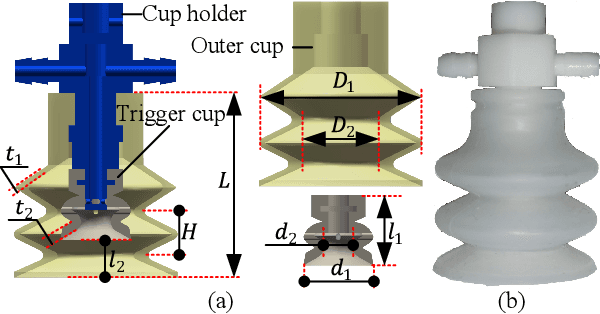
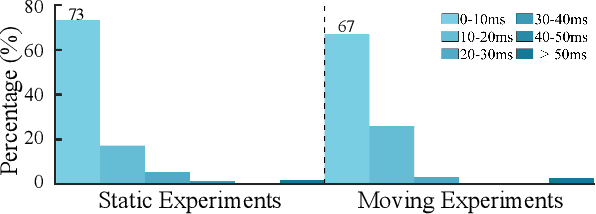
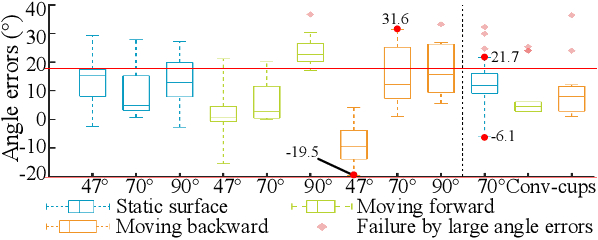
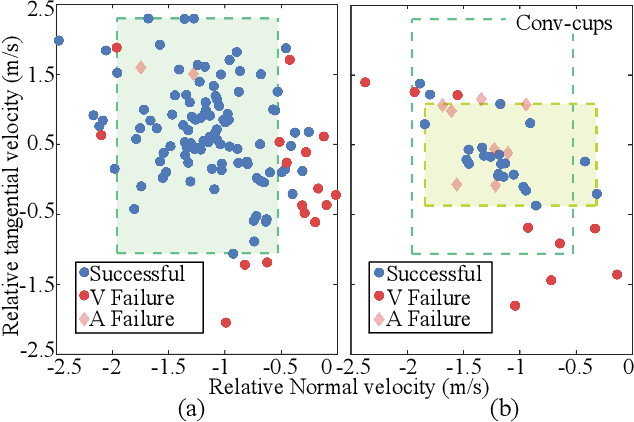
Perching on surfaces of moving objects, like vehicles, could extend the flight times and range of quadrotors. For surfaces attachment, suction cups are usually adopted due to their durability and large adhesion force. To seal on surfaces, suction cups are required to be aligned with surfaces and match to the frictions on end faces induced by relative tangential velocity. However, when the object surface is moving and inclined such that an aggressive maneuver is required, the attitude and relative velocity errors of quadrotors would become significant, which poses challenges to perch. To address the problem, we proposed a real-time trajectory planning algorithm to alleviate the velocity errors of quadrotors relative to moving surfaces. Multimodal search in dynamic time-domain is developed in the algorithm and thus the time-optimal aggressive trajectories can be efficiently generated. To further adapt to the residual attitude and relative velocity errors, we design a compliant gripper using self-sealing cups. Multiple cups in different directions are integrated into a wheel-like mechanism to increase the tolerance to attitude errors. The wheel mechanism in the gripper also eliminates the requirement of matching the attitude and tangential velocity and thus increases the adaptability to tangential velocity. Extensive tests are conducted, including comparison experiments, to perch on static and moving surfaces at various inclinations. Results demonstrate that our proposed system enables a quadrotor to reliably perch on static and moving inclined (up to 1.18$m/s$ and 90$^\circ$) surfaces with a success rate of 70\% or higher. The trajectory planner is valid and efficient. Compared to conventional suction cup grippers in moving surface perching, our gripper has larger adaptability to attitude errors and tangential velocities, and the success rate increases by 45\%.
An Efficient Egocentric Regulator for Continuous Targeting Problems of the Underactuated Quadrotor
Aug 06, 2021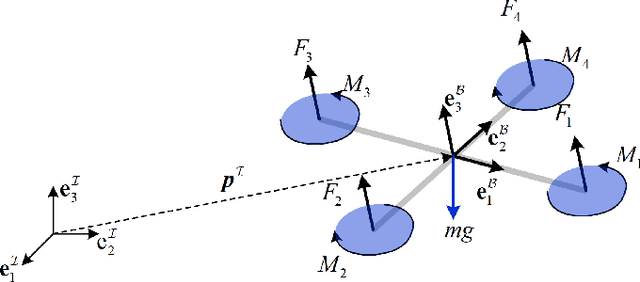
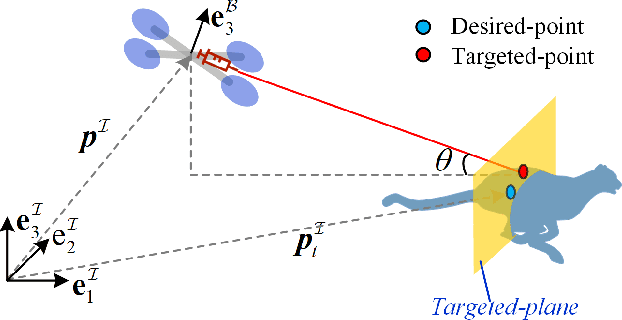
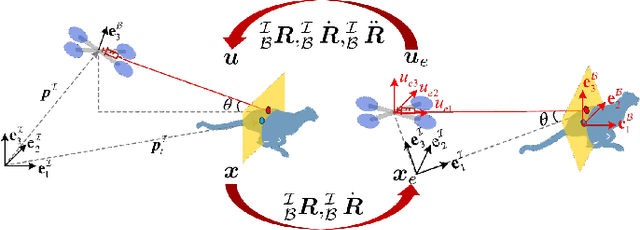
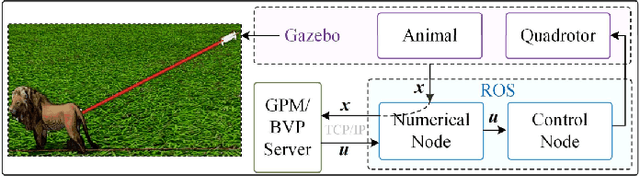
Flying robots such as the quadrotor could provide an efficient approach for medical treatment or sensor placing of wild animals. In these applications, continuously targeting the moving animal is a crucial requirement. Due to the underactuated characteristics of the quadrotor and the coupled kinematics with the animal, nonlinear optimal tracking approaches, other than smooth feedback control, are required. However, with severe nonlinearities, it would be time-consuming to evaluate control inputs, and real-time tracking may not be achieved with generic optimizers onboard. To tackle this problem, a novel efficient egocentric regulation approach with high computational efficiency is proposed in this paper. Specifically, it directly formulates the optimal tracking problem in an egocentric manner regarding the quadrotor's body coordinates. Meanwhile, the nonlinearities of the system are peeled off through a mapping of the feedback states as well as control inputs, between the inertial and body coordinates. In this way, the proposed efficient egocentric regulator only requires solving a quadratic performance objective with linear constraints and then generate control inputs analytically. Comparative simulations and mimic biological experiment are carried out to verify the effectiveness and computational efficiency. Results demonstrate that the proposed control approach presents the highest and stablest computational efficiency than generic optimizers on different platforms. Particularly, on a commonly utilized onboard computer, our method can compute the control action in approximately 0.3 ms, which is on the order of 350 times faster than that of generic nonlinear optimizers, establishing a control frequency around 3000 Hz.
Bio-inspired Obstacle Avoidance for Flying Robots with Active Sensing
Oct 10, 2020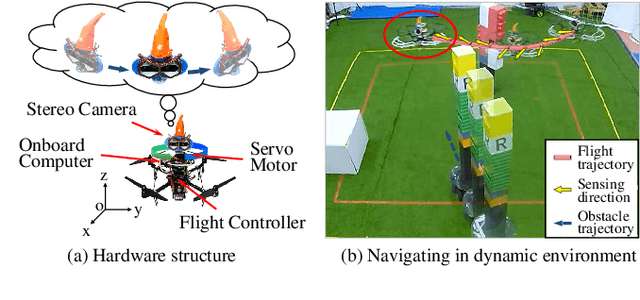
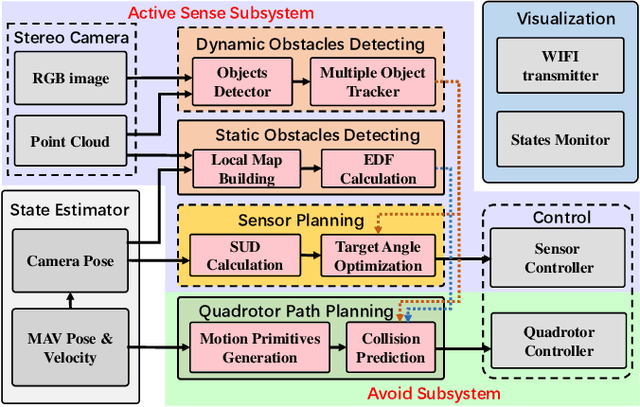
This paper presents a novel vision-based obstacle avoidance system for flying robots working in dynamic environments. Instead of fusing multiple sensors to enlarge the view field, we introduce a bio-inspired solution that utilizes a stereo camera with independent rotational DOF to sense the obstacles actively. In particular, the rotation is planned heuristically by multiple objectives that can benefit flight safety, including tracking dynamic obstacles, observing the heading direction, and exploring the previously unseen area. With this sensing result, a flight path is planned based on real-time sampling and collision checking in state space, which constitutes an active sense and avoid (ASAA) system. Experiments demonstrate that this system is capable of handling environments with dynamic obstacles and abrupt changes in goal direction. Since only one stereo camera is utilized, this system provides a low-cost but effective approach to overcome the view field limitation in visual navigation.
Learning to Navigate from Simulation via Spatial and Semantic Information Synthesis with Noise Model Embedding
Nov 12, 2019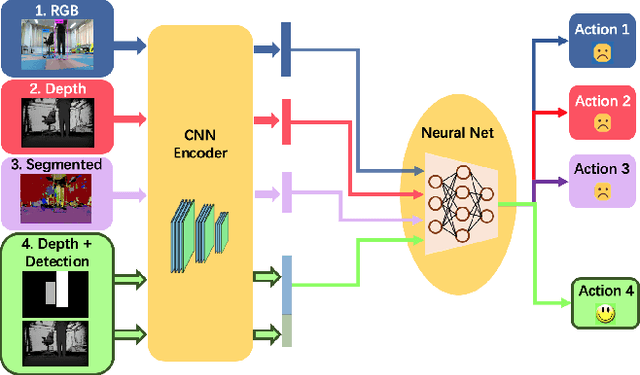
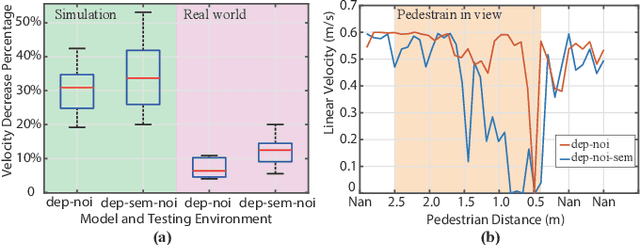
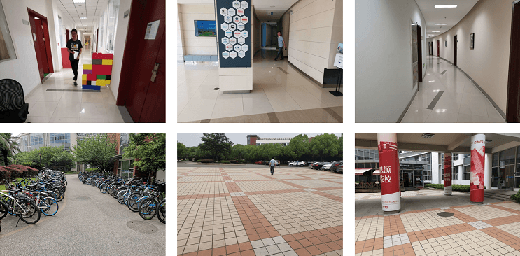
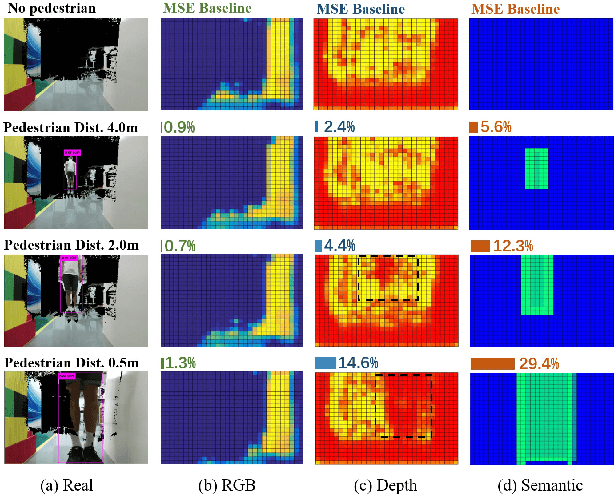
While training an end-to-end navigation network in the real world is usually of high cost, simulation provides a safe and cheap environment in this training stage. However, training neural network models in simulation brings up the problem of how to effectively transfer the model from simulation to the real world (sim-to-real). In this work, we regard the environment representation as a crucial element in this transfer process and propose a visual information pyramid (VIP) model to systematically investigate a practical environment representation. A novel representation composed of spatial and semantic information synthesis is then established accordingly, where noise model embedding is particularly considered. To explore the effectiveness of this representation, we compared the performance with representations popularly used in the literature in both simulated and real-world scenarios. Results suggest that our environment representation stands out. Furthermore, an analysis on the feature map is implemented to investigate the effectiveness through inner reaction, which could be irradiative for future researches on end-to-end navigation.