 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHitchhiker: A Quadrotor Aggressively Perching on a Moving Inclined Surface Using Compliant Suction Cup Gripper
Paper and Code
Mar 04, 2022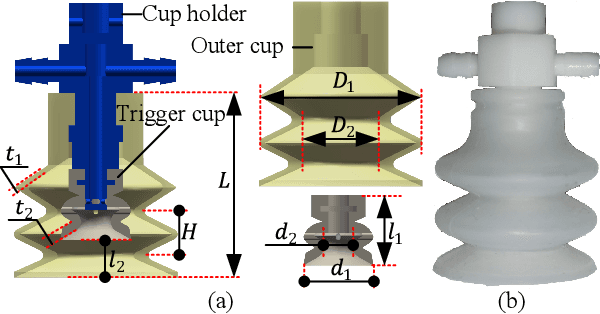
Perching on surfaces of moving objects, like vehicles, could extend the flight times and range of quadrotors. For surfaces attachment, suction cups are usually adopted due to their durability and large adhesion force. To seal on surfaces, suction cups are required to be aligned with surfaces and match to the frictions on end faces induced by relative tangential velocity. However, when the object surface is moving and inclined such that an aggressive maneuver is required, the attitude and relative velocity errors of quadrotors would become significant, which poses challenges to perch. To address the problem, we proposed a real-time trajectory planning algorithm to alleviate the velocity errors of quadrotors relative to moving surfaces. Multimodal search in dynamic time-domain is developed in the algorithm and thus the time-optimal aggressive trajectories can be efficiently generated. To further adapt to the residual attitude and relative velocity errors, we design a compliant gripper using self-sealing cups. Multiple cups in different directions are integrated into a wheel-like mechanism to increase the tolerance to attitude errors. The wheel mechanism in the gripper also eliminates the requirement of matching the attitude and tangential velocity and thus increases the adaptability to tangential velocity. Extensive tests are conducted, including comparison experiments, to perch on static and moving surfaces at various inclinations. Results demonstrate that our proposed system enables a quadrotor to reliably perch on static and moving inclined (up to 1.18$m/s$ and 90$^\circ$) surfaces with a success rate of 70\% or higher. The trajectory planner is valid and efficient. Compared to conventional suction cup grippers in moving surface perching, our gripper has larger adaptability to attitude errors and tangential velocities, and the success rate increases by 45\%.