 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Modeling of Massage Techniques and Reproduction by Robotic Arms
Dec 08, 2024
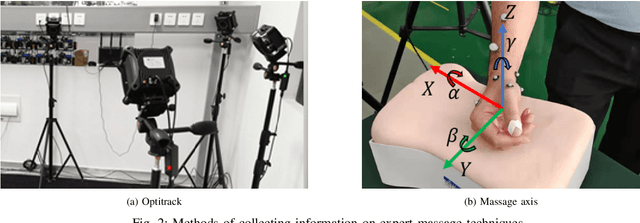

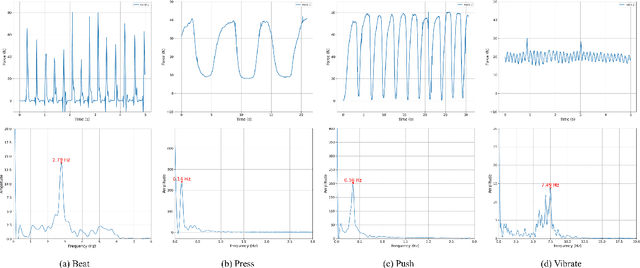
This paper explores the digital modeling and robotic reproduction of traditional Chinese medicine (TCM) massage techniques. We adopt an adaptive admittance control algorithm to optimize force and position control, ensuring safety and comfort. The paper analyzes key TCM techniques from kinematic and dynamic perspectives, and designs robotic systems to reproduce these massage techniques. The results demonstrate that the robot successfully mimics the characteristics of TCM massage, providing a foundation for integrating traditional therapy with modern robotics and expanding assistive therapy applications.
Optimized Design of A Haptic Unit for Vibrotactile Amplitude Modulation
Sep 13, 2024Communicating information to users is a crucial aspect of human-machine interaction. Vibrotactile feedback encodes information into spatiotemporal vibrations, enabling users to perceive tactile sensations. It offers advantages such as lightweight, wearability, and high stability, with broad applications in sensory substitution, virtual reality, education, and healthcare. However, existing haptic unit designs lack amplitude modulation capabilities, which limits their applications. This paper proposed an optimized design of the haptic unit from the perspective of vibration amplitude modulation. A modified elastic model was developed to describe the propagation and attenuation mechanisms of vibration in the skin. Based on the model, two types of hierarchical architectural design were proposed. The design incorporated various materials arranged in multiple layers to amplify or attenuate the vibration amplitude as it traveled through the structure. An experimental platform was built to evaluate the performance of the optimized design.