 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDuoMo: Dual Motion Diffusion for World-Space Human Reconstruction
Mar 03, 2026We present DuoMo, a generative method that recovers human motion in world-space coordinates from unconstrained videos with noisy or incomplete observations. Reconstructing such motion requires solving a fundamental trade-off: generalizing from diverse and noisy video inputs while maintaining global motion consistency. Our approach addresses this problem by factorizing motion learning into two diffusion models. The camera-space model first estimates motion from videos in camera coordinates. The world-space model then lifts this initial estimate into world coordinates and refines it to be globally consistent. Together, the two models can reconstruct motion across diverse scenes and trajectories, even from highly noisy or incomplete observations. Moreover, our formulation is general, generating the motion of mesh vertices directly and bypassing parametric models. DuoMo achieves state-of-the-art performance. On EMDB, our method obtains a 16% reduction in world-space reconstruction error while maintaining low foot skating. On RICH, it obtains a 30% reduction in world-space error. Project page: https://yufu-wang.github.io/duomo/
Detection of Active Emergency Vehicles using Per-Frame CNNs and Output Smoothing
Dec 28, 2022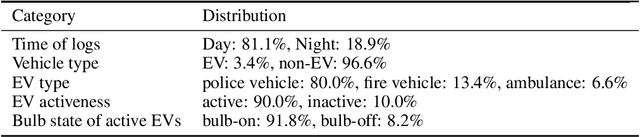



While inferring common actor states (such as position or velocity) is an important and well-explored task of the perception system aboard a self-driving vehicle (SDV), it may not always provide sufficient information to the SDV. This is especially true in the case of active emergency vehicles (EVs), where light-based signals also need to be captured to provide a full context. We consider this problem and propose a sequential methodology for the detection of active EVs, using an off-the-shelf CNN model operating at a frame level and a downstream smoother that accounts for the temporal aspect of flashing EV lights. We also explore model improvements through data augmentation and training with additional hard samples.
Convolutions for Spatial Interaction Modeling
Apr 15, 2021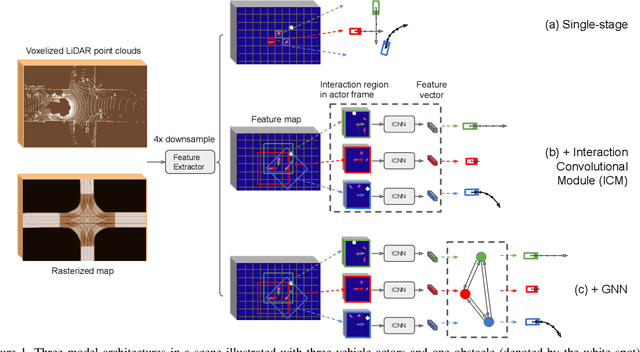
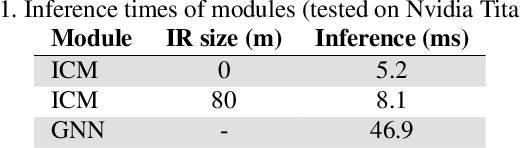
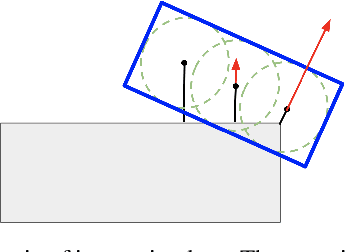
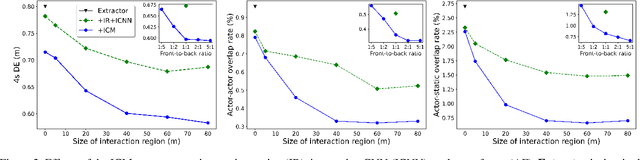
In many different fields interactions between objects play a critical role in determining their behavior. Graph neural networks (GNNs) have emerged as a powerful tool for modeling interactions, although often at the cost of adding considerable complexity and latency. In this paper, we consider the problem of spatial interaction modeling in the context of predicting the motion of actors around autonomous vehicles, and investigate alternative approaches to GNNs. We revisit convolutions and show that they can demonstrate comparable performance to graph networks in modeling spatial interactions with lower latency, thus providing an effective and efficient alternative in time-critical systems. Moreover, we propose a novel interaction loss to further improve the interaction modeling of the considered methods.
Temporally-Continuous Probabilistic Prediction using Polynomial Trajectory Parameterization
Nov 01, 2020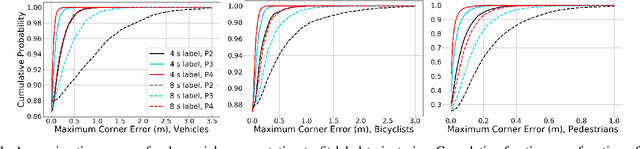
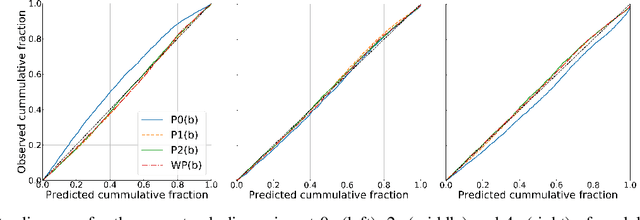
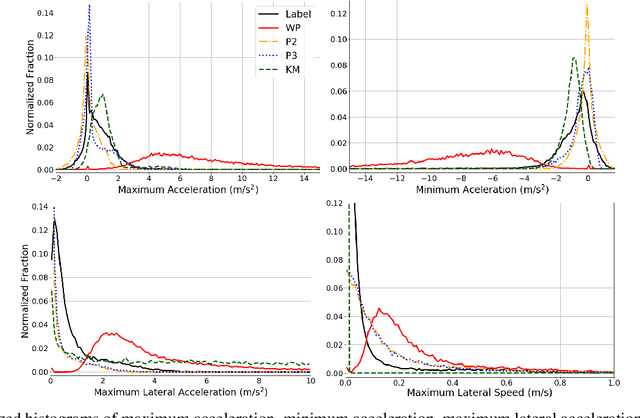
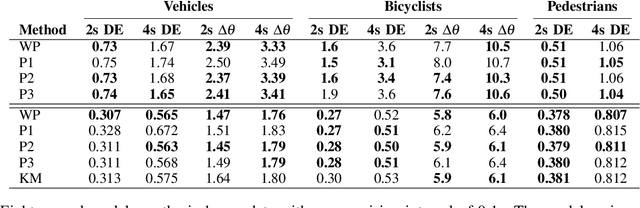
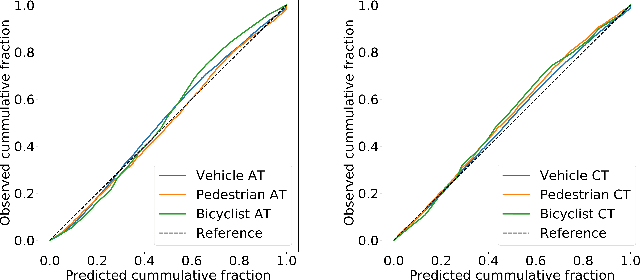
A commonly-used representation for motion prediction of actors is a sequence of waypoints (comprising positions and orientations) for each actor at discrete future time-points. While this approach is simple and flexible, it can exhibit unrealistic higher-order derivatives (such as acceleration) and approximation errors at intermediate time steps. To address this issue we propose a simple and general representation for temporally continuous probabilistic trajectory prediction that is based on polynomial trajectory parameterization. We evaluate the proposed representation on supervised trajectory prediction tasks using two large self-driving data sets. The results show realistic higher-order derivatives and better accuracy at interpolated time-points, as well as the benefits of the inferred noise distributions over the trajectories. Extensive experimental studies based on existing state-of-the-art models demonstrate the effectiveness of the proposed approach relative to other representations in predicting the future motions of vehicle, bicyclist, and pedestrian traffic actors.
MultiXNet: Multiclass Multistage Multimodal Motion Prediction
Jun 10, 2020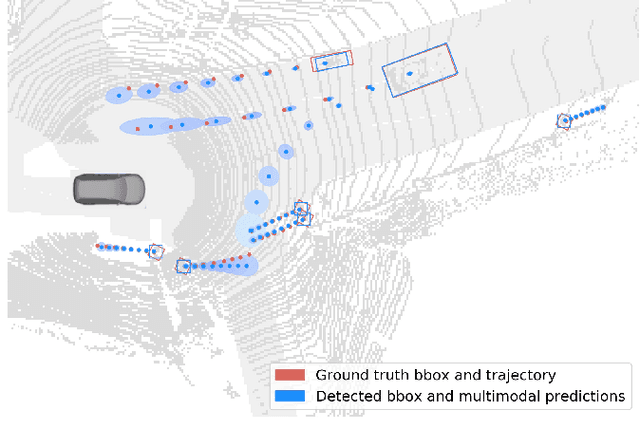
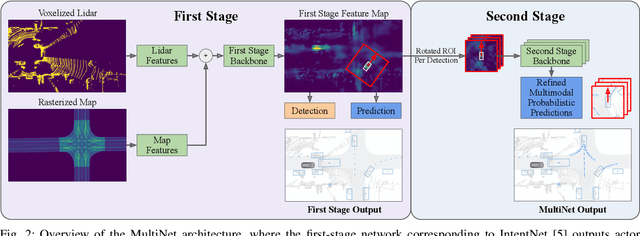
One of the critical pieces of the self-driving puzzle is understanding the surroundings of the self-driving vehicle (SDV) and predicting how these surroundings will change in the near future. To address this task we propose MultiXNet, an end-to-end approach for detection and motion prediction based directly on lidar sensor data. This approach builds on prior work by handling multiple classes of traffic actors, adding a jointly trained second-stage trajectory refinement step, and producing a multimodal probability distribution over future actor motion that includes both multiple discrete traffic behaviors and calibrated continuous uncertainties. The method was evaluated on a large-scale, real-world data set collected by a fleet of SDVs in several cities, with the results indicating that it outperforms existing state-of-the-art approaches.