 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Deep Reinforcement Learning in Robotics via Adaptive Gradient-Masked Adversarial Attacks
Mar 26, 2025Deep reinforcement learning (DRL) has emerged as a promising approach for robotic control, but its realworld deployment remains challenging due to its vulnerability to environmental perturbations. Existing white-box adversarial attack methods, adapted from supervised learning, fail to effectively target DRL agents as they overlook temporal dynamics and indiscriminately perturb all state dimensions, limiting their impact on long-term rewards. To address these challenges, we propose the Adaptive Gradient-Masked Reinforcement (AGMR) Attack, a white-box attack method that combines DRL with a gradient-based soft masking mechanism to dynamically identify critical state dimensions and optimize adversarial policies. AGMR selectively allocates perturbations to the most impactful state features and incorporates a dynamic adjustment mechanism to balance exploration and exploitation during training. Extensive experiments demonstrate that AGMR outperforms state-of-the-art adversarial attack methods in degrading the performance of the victim agent and enhances the victim agent's robustness through adversarial defense mechanisms.
State-Aware Perturbation Optimization for Robust Deep Reinforcement Learning
Mar 26, 2025Recently, deep reinforcement learning (DRL) has emerged as a promising approach for robotic control. However, the deployment of DRL in real-world robots is hindered by its sensitivity to environmental perturbations. While existing whitebox adversarial attacks rely on local gradient information and apply uniform perturbations across all states to evaluate DRL robustness, they fail to account for temporal dynamics and state-specific vulnerabilities. To combat the above challenge, we first conduct a theoretical analysis of white-box attacks in DRL by establishing the adversarial victim-dynamics Markov decision process (AVD-MDP), to derive the necessary and sufficient conditions for a successful attack. Based on this, we propose a selective state-aware reinforcement adversarial attack method, named STAR, to optimize perturbation stealthiness and state visitation dispersion. STAR first employs a soft mask-based state-targeting mechanism to minimize redundant perturbations, enhancing stealthiness and attack effectiveness. Then, it incorporates an information-theoretic optimization objective to maximize mutual information between perturbations, environmental states, and victim actions, ensuring a dispersed state-visitation distribution that steers the victim agent into vulnerable states for maximum return reduction. Extensive experiments demonstrate that STAR outperforms state-of-the-art benchmarks.
Psy-Copilot: Visual Chain of Thought for Counseling
Mar 05, 2025

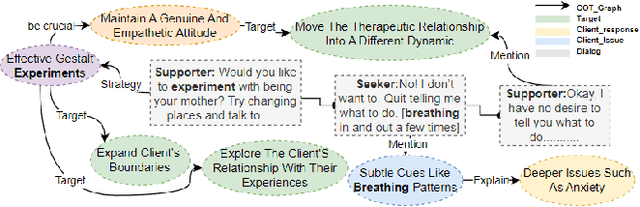

Large language models (LLMs) are becoming increasingly popular in the field of psychological counseling. However, when human therapists work with LLMs in therapy sessions, it is hard to understand how the model gives the answers. To address this, we have constructed Psy-COT, a graph designed to visualize the thought processes of LLMs during therapy sessions. The Psy-COT graph presents semi-structured counseling conversations alongside step-by-step annotations that capture the reasoning and insights of therapists. Moreover, we have developed Psy-Copilot, which is a conversational AI assistant designed to assist human psychological therapists in their consultations. It can offer traceable psycho-information based on retrieval, including response candidates, similar dialogue sessions, related strategies, and visual traces of results. We have also built an interactive platform for AI-assisted counseling. It has an interface that displays the relevant parts of the retrieval sub-graph. The Psy-Copilot is designed not to replace psychotherapists but to foster collaboration between AI and human therapists, thereby promoting mental health development. Our code and demo are both open-sourced and available for use.
Psy-Insight: Explainable Multi-turn Bilingual Dataset for Mental Health Counseling
Mar 05, 2025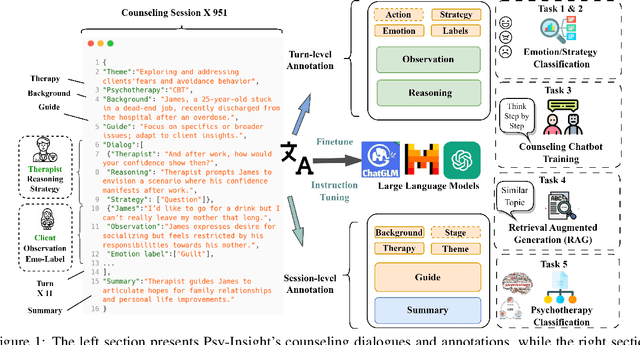
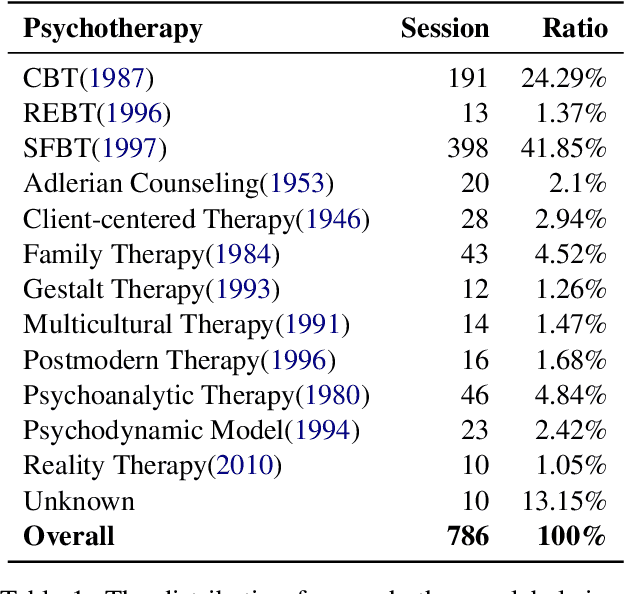
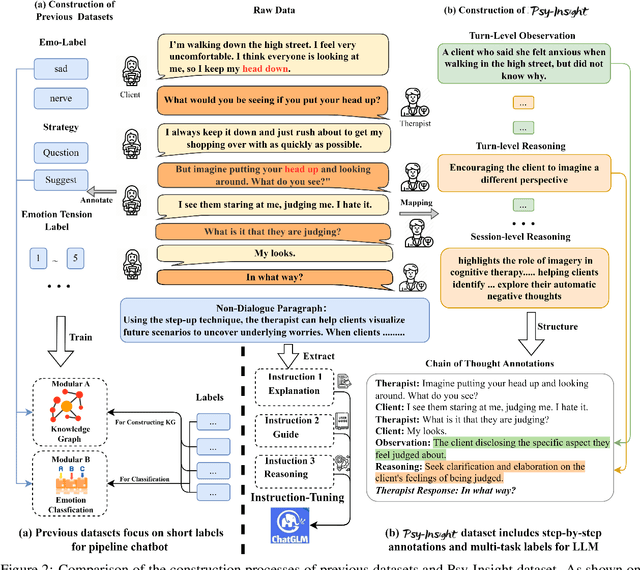
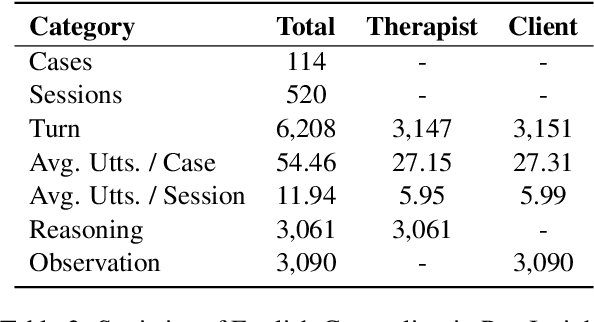
The in-context learning capabilities of large language models (LLMs) show great potential in mental health support. However, the lack of counseling datasets, particularly in Chinese corpora, restricts their application in this field. To address this, we constructed Psy-Insight, the first mental health-oriented explainable multi-task bilingual dataset. We collected face-to-face multi-turn counseling dialogues, which are annotated with multi-task labels and conversation process explanations. Our annotations include psychotherapy, emotion, strategy, and topic labels, as well as turn-level reasoning and session-level guidance. Psy-Insight is not only suitable for tasks such as label recognition but also meets the need for training LLMs to act as empathetic counselors through logical reasoning. Experiments show that training LLMs on Psy-Insight enables the models to not only mimic the conversation style but also understand the underlying strategies and reasoning of counseling.
HE-Nav: A High-Performance and Efficient Navigation System for Aerial-Ground Robots in Cluttered Environments
Oct 07, 2024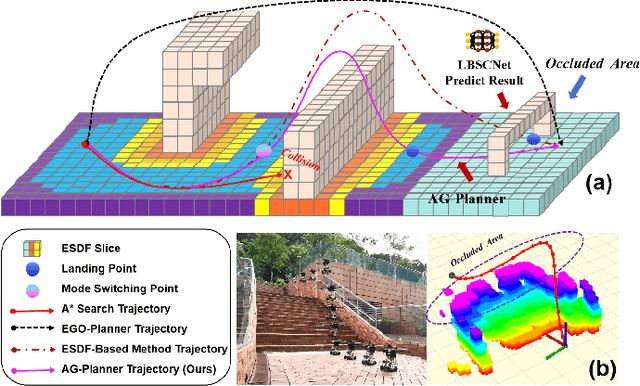
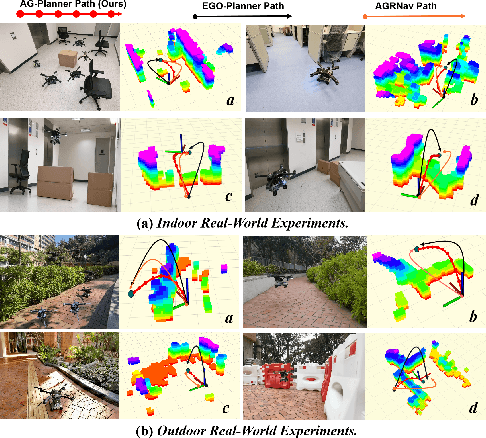
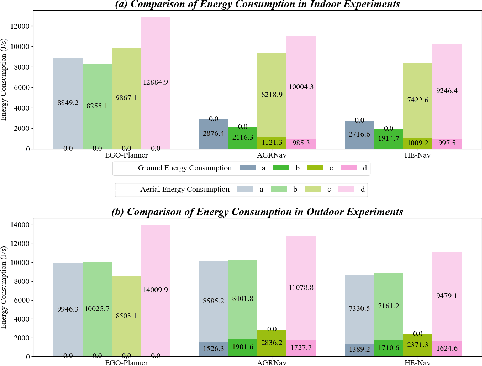
Existing AGR navigation systems have advanced in lightly occluded scenarios (e.g., buildings) by employing 3D semantic scene completion networks for voxel occupancy prediction and constructing Euclidean Signed Distance Field (ESDF) maps for collision-free path planning. However, these systems exhibit suboptimal performance and efficiency in cluttered environments with severe occlusions (e.g., dense forests or tall walls), due to limitations arising from perception networks' low prediction accuracy and path planners' high computational overhead. In this paper, we present HE-Nav, the first high-performance and efficient navigation system tailored for AGRs operating in cluttered environments. The perception module utilizes a lightweight semantic scene completion network (LBSCNet), guided by a bird's eye view (BEV) feature fusion and enhanced by an exquisitely designed SCB-Fusion module and attention mechanism. This enables real-time and efficient obstacle prediction in cluttered areas, generating a complete local map. Building upon this completed map, our novel AG-Planner employs the energy-efficient kinodynamic A* search algorithm to guarantee planning is energy-saving. Subsequent trajectory optimization processes yield safe, smooth, dynamically feasible and ESDF-free aerial-ground hybrid paths. Extensive experiments demonstrate that HE-Nav achieved 7x energy savings in real-world situations while maintaining planning success rates of 98% in simulation scenarios. Code and video are available on our project page: https://jmwang0117.github.io/HE-Nav/.
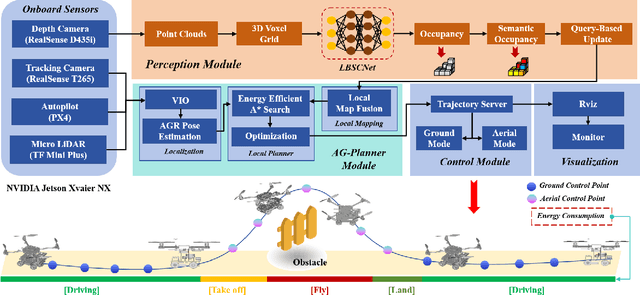
OMEGA: Efficient Occlusion-Aware Navigation for Air-Ground Robot in Dynamic Environments via State Space Model
Aug 20, 2024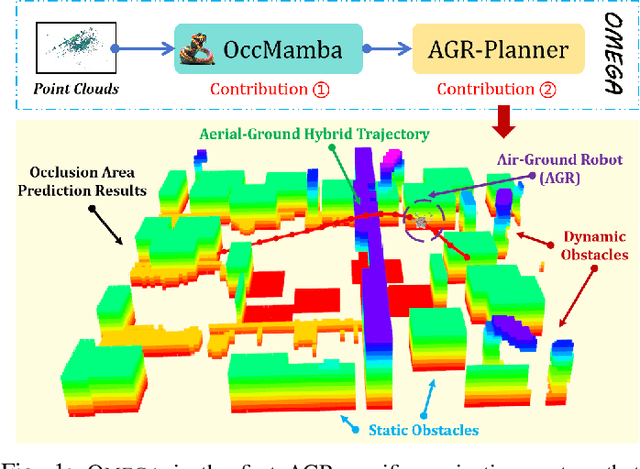
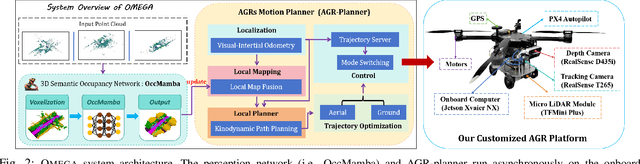
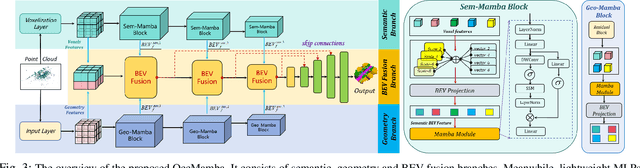
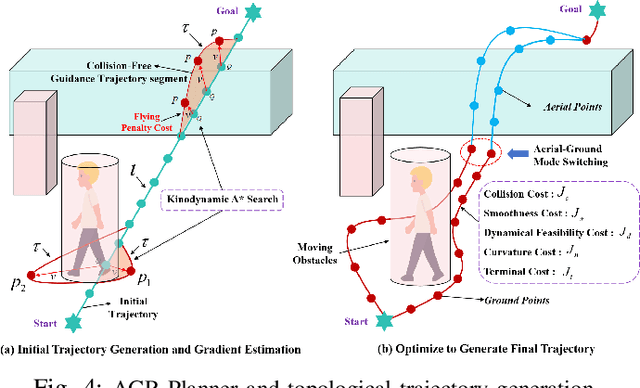
Air-ground robots (AGRs) are widely used in surveillance and disaster response due to their exceptional mobility and versatility (i.e., flying and driving). Current AGR navigation systems perform well in static occlusion-prone environments (e.g., indoors) by using 3D semantic occupancy networks to predict occlusions for complete local mapping and then computing Euclidean Signed Distance Field (ESDF) for path planning. However, these systems face challenges in dynamic, severe occlusion scenes (e.g., crowds) due to limitations in perception networks' low prediction accuracy and path planners' high computation overhead. In this paper, we propose OMEGA, which contains OccMamba with an Efficient AGR-Planner to address the above-mentioned problems. OccMamba adopts a novel architecture that separates semantic and occupancy prediction into independent branches, incorporating two mamba blocks within these branches. These blocks efficiently extract semantic and geometric features in 3D environments with linear complexity, ensuring that the network can learn long-distance dependencies to improve prediction accuracy. Semantic and geometric features are combined within the Bird's Eye View (BEV) space to minimise computational overhead during feature fusion. The resulting semantic occupancy map is then seamlessly integrated into the local map, providing occlusion awareness of the dynamic environment. Our AGR-Planner utilizes this local map and employs kinodynamic A* search and gradient-based trajectory optimization to guarantee planning is ESDF-free and energy-efficient. Extensive experiments demonstrate that OccMamba outperforms the state-of-the-art 3D semantic occupancy network with 25.0% mIoU. End-to-end navigation experiments in dynamic scenes verify OMEGA's efficiency, achieving a 96% average planning success rate. Code and video are available at https://jmwang0117.github.io/OMEGA/.
Hybrid-Parallel: Achieving High Performance and Energy Efficient Distributed Inference on Robots
May 29, 2024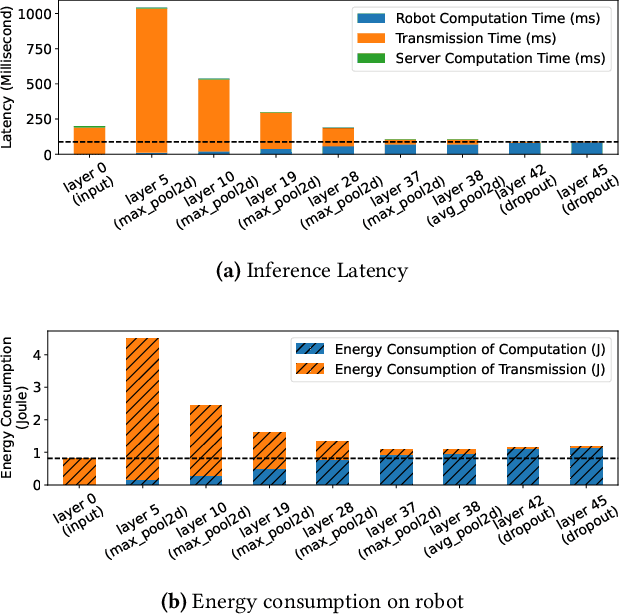
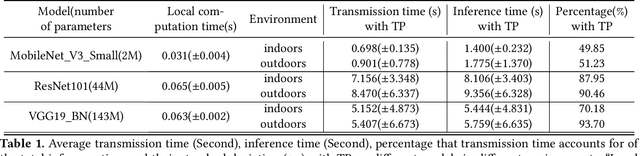
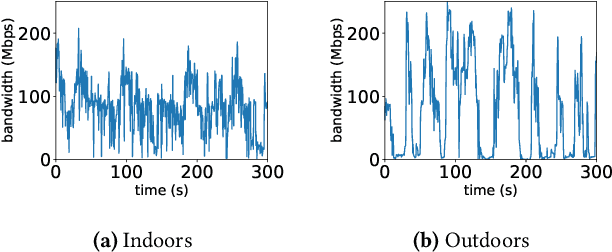
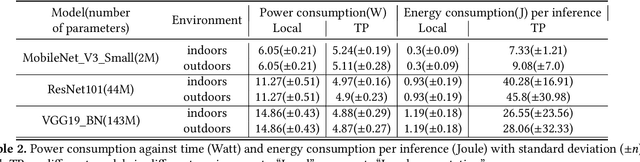
The rapid advancements in machine learning techniques have led to significant achievements in various real-world robotic tasks. These tasks heavily rely on fast and energy-efficient inference of deep neural network (DNN) models when deployed on robots. To enhance inference performance, distributed inference has emerged as a promising approach, parallelizing inference across multiple powerful GPU devices in modern data centers using techniques such as data parallelism, tensor parallelism, and pipeline parallelism. However, when deployed on real-world robots, existing parallel methods fail to provide low inference latency and meet the energy requirements due to the limited bandwidth of robotic IoT. We present Hybrid-Parallel, a high-performance distributed inference system optimized for robotic IoT. Hybrid-Parallel employs a fine-grained approach to parallelize inference at the granularity of local operators within DNN layers (i.e., operators that can be computed independently with the partial input, such as the convolution kernel in the convolution layer). By doing so, Hybrid-Parallel enables different operators of different layers to be computed and transmitted concurrently, and overlap the computation and transmission phases within the same inference task. The evaluation demonstrate that Hybrid-Parallel reduces inference time by 14.9% ~41.1% and energy consumption per inference by up to 35.3% compared to the state-of-the-art baselines.
AGRNav: Efficient and Energy-Saving Autonomous Navigation for Air-Ground Robots in Occlusion-Prone Environments
Mar 18, 2024
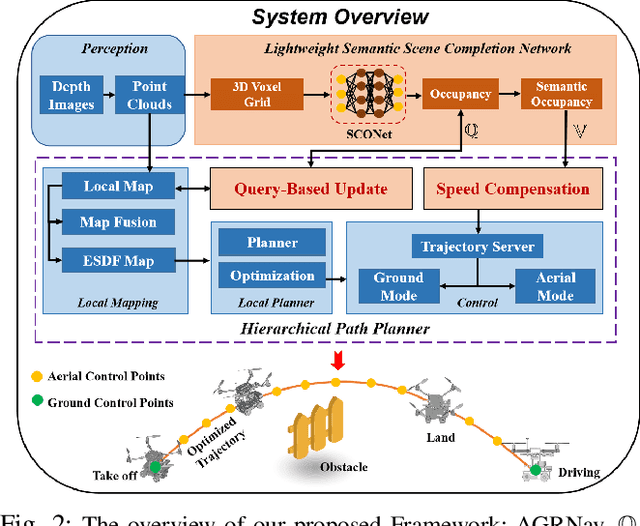
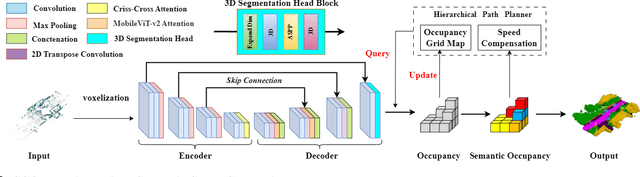
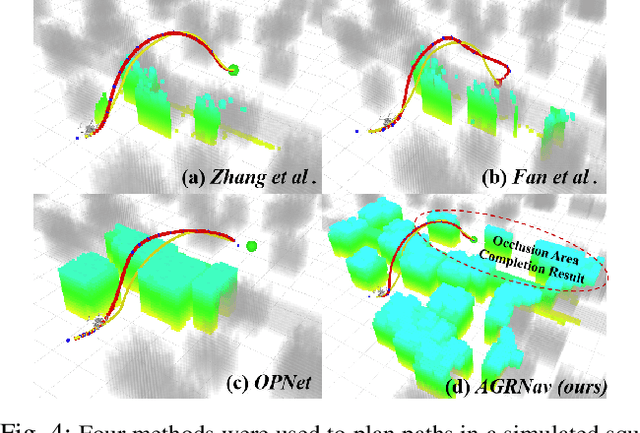
The exceptional mobility and long endurance of air-ground robots are raising interest in their usage to navigate complex environments (e.g., forests and large buildings). However, such environments often contain occluded and unknown regions, and without accurate prediction of unobserved obstacles, the movement of the air-ground robot often suffers a suboptimal trajectory under existing mapping-based and learning-based navigation methods. In this work, we present AGRNav, a novel framework designed to search for safe and energy-saving air-ground hybrid paths. AGRNav contains a lightweight semantic scene completion network (SCONet) with self-attention to enable accurate obstacle predictions by capturing contextual information and occlusion area features. The framework subsequently employs a query-based method for low-latency updates of prediction results to the grid map. Finally, based on the updated map, the hierarchical path planner efficiently searches for energy-saving paths for navigation. We validate AGRNav's performance through benchmarks in both simulated and real-world environments, demonstrating its superiority over classical and state-of-the-art methods. The open-source code is available at https://github.com/jmwang0117/AGRNav.