 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNSC-SL: A Bandwidth-Aware Neural Subspace Compression for Communication-Efficient Split Learning
Feb 02, 2026The expanding scale of neural networks poses a major challenge for distributed machine learning, particularly under limited communication resources. While split learning (SL) alleviates client computational burden by distributing model layers between clients and server, it incurs substantial communication overhead from frequent transmission of intermediate activations and gradients. To tackle this issue, we propose NSC-SL, a bandwidth-aware adaptive compression algorithm for communication-efficient SL. NSC-SL first dynamically determines the optimal rank of low-rank approximation based on the singular value distribution for adapting real-time bandwidth constraints. Then, NSC-SL performs error-compensated tensor factorization using alternating orthogonal iteration with residual feedback, effectively minimizing truncation loss. The collaborative mechanisms enable NSC-SL to achieve high compression ratios while preserving semantic-rich information essential for convergence. Extensive experiments demonstrate the superb performance of NSC-SL.
Sample Efficient Experience Replay in Non-stationary Environments
Sep 18, 2025Reinforcement learning (RL) in non-stationary environments is challenging, as changing dynamics and rewards quickly make past experiences outdated. Traditional experience replay (ER) methods, especially those using TD-error prioritization, struggle to distinguish between changes caused by the agent's policy and those from the environment, resulting in inefficient learning under dynamic conditions. To address this challenge, we propose the Discrepancy of Environment Dynamics (DoE), a metric that isolates the effects of environment shifts on value functions. Building on this, we introduce Discrepancy of Environment Prioritized Experience Replay (DEER), an adaptive ER framework that prioritizes transitions based on both policy updates and environmental changes. DEER uses a binary classifier to detect environment changes and applies distinct prioritization strategies before and after each shift, enabling more sample-efficient learning. Experiments on four non-stationary benchmarks demonstrate that DEER further improves the performance of off-policy algorithms by 11.54 percent compared to the best-performing state-of-the-art ER methods.
LEED: A Highly Efficient and Scalable LLM-Empowered Expert Demonstrations Framework for Multi-Agent Reinforcement Learning
Sep 18, 2025Multi-agent reinforcement learning (MARL) holds substantial promise for intelligent decision-making in complex environments. However, it suffers from a coordination and scalability bottleneck as the number of agents increases. To address these issues, we propose the LLM-empowered expert demonstrations framework for multi-agent reinforcement learning (LEED). LEED consists of two components: a demonstration generation (DG) module and a policy optimization (PO) module. Specifically, the DG module leverages large language models to generate instructions for interacting with the environment, thereby producing high-quality demonstrations. The PO module adopts a decentralized training paradigm, where each agent utilizes the generated demonstrations to construct an expert policy loss, which is then integrated with its own policy loss. This enables each agent to effectively personalize and optimize its local policy based on both expert knowledge and individual experience. Experimental results show that LEED achieves superior sample efficiency, time efficiency, and robust scalability compared to state-of-the-art baselines.
State-Aware Perturbation Optimization for Robust Deep Reinforcement Learning
Mar 26, 2025Recently, deep reinforcement learning (DRL) has emerged as a promising approach for robotic control. However, the deployment of DRL in real-world robots is hindered by its sensitivity to environmental perturbations. While existing whitebox adversarial attacks rely on local gradient information and apply uniform perturbations across all states to evaluate DRL robustness, they fail to account for temporal dynamics and state-specific vulnerabilities. To combat the above challenge, we first conduct a theoretical analysis of white-box attacks in DRL by establishing the adversarial victim-dynamics Markov decision process (AVD-MDP), to derive the necessary and sufficient conditions for a successful attack. Based on this, we propose a selective state-aware reinforcement adversarial attack method, named STAR, to optimize perturbation stealthiness and state visitation dispersion. STAR first employs a soft mask-based state-targeting mechanism to minimize redundant perturbations, enhancing stealthiness and attack effectiveness. Then, it incorporates an information-theoretic optimization objective to maximize mutual information between perturbations, environmental states, and victim actions, ensuring a dispersed state-visitation distribution that steers the victim agent into vulnerable states for maximum return reduction. Extensive experiments demonstrate that STAR outperforms state-of-the-art benchmarks.
Robust Deep Reinforcement Learning in Robotics via Adaptive Gradient-Masked Adversarial Attacks
Mar 26, 2025Deep reinforcement learning (DRL) has emerged as a promising approach for robotic control, but its realworld deployment remains challenging due to its vulnerability to environmental perturbations. Existing white-box adversarial attack methods, adapted from supervised learning, fail to effectively target DRL agents as they overlook temporal dynamics and indiscriminately perturb all state dimensions, limiting their impact on long-term rewards. To address these challenges, we propose the Adaptive Gradient-Masked Reinforcement (AGMR) Attack, a white-box attack method that combines DRL with a gradient-based soft masking mechanism to dynamically identify critical state dimensions and optimize adversarial policies. AGMR selectively allocates perturbations to the most impactful state features and incorporates a dynamic adjustment mechanism to balance exploration and exploitation during training. Extensive experiments demonstrate that AGMR outperforms state-of-the-art adversarial attack methods in degrading the performance of the victim agent and enhances the victim agent's robustness through adversarial defense mechanisms.
Rethinking Adversarial Attacks in Reinforcement Learning from Policy Distribution Perspective
Jan 08, 2025Deep Reinforcement Learning (DRL) suffers from uncertainties and inaccuracies in the observation signal in realworld applications. Adversarial attack is an effective method for evaluating the robustness of DRL agents. However, existing attack methods targeting individual sampled actions have limited impacts on the overall policy distribution, particularly in continuous action spaces. To address these limitations, we propose the Distribution-Aware Projected Gradient Descent attack (DAPGD). DAPGD uses distribution similarity as the gradient perturbation input to attack the policy network, which leverages the entire policy distribution rather than relying on individual samples. We utilize the Bhattacharyya distance in DAPGD to measure policy similarity, enabling sensitive detection of subtle but critical differences between probability distributions. Our experiment results demonstrate that DAPGD achieves SOTA results compared to the baselines in three robot navigation tasks, achieving an average 22.03% higher reward drop compared to the best baseline.
HE-Nav: A High-Performance and Efficient Navigation System for Aerial-Ground Robots in Cluttered Environments
Oct 07, 2024Existing AGR navigation systems have advanced in lightly occluded scenarios (e.g., buildings) by employing 3D semantic scene completion networks for voxel occupancy prediction and constructing Euclidean Signed Distance Field (ESDF) maps for collision-free path planning. However, these systems exhibit suboptimal performance and efficiency in cluttered environments with severe occlusions (e.g., dense forests or tall walls), due to limitations arising from perception networks' low prediction accuracy and path planners' high computational overhead. In this paper, we present HE-Nav, the first high-performance and efficient navigation system tailored for AGRs operating in cluttered environments. The perception module utilizes a lightweight semantic scene completion network (LBSCNet), guided by a bird's eye view (BEV) feature fusion and enhanced by an exquisitely designed SCB-Fusion module and attention mechanism. This enables real-time and efficient obstacle prediction in cluttered areas, generating a complete local map. Building upon this completed map, our novel AG-Planner employs the energy-efficient kinodynamic A* search algorithm to guarantee planning is energy-saving. Subsequent trajectory optimization processes yield safe, smooth, dynamically feasible and ESDF-free aerial-ground hybrid paths. Extensive experiments demonstrate that HE-Nav achieved 7x energy savings in real-world situations while maintaining planning success rates of 98% in simulation scenarios. Code and video are available on our project page: https://jmwang0117.github.io/HE-Nav/.
AGRNav: Efficient and Energy-Saving Autonomous Navigation for Air-Ground Robots in Occlusion-Prone Environments
Mar 18, 2024
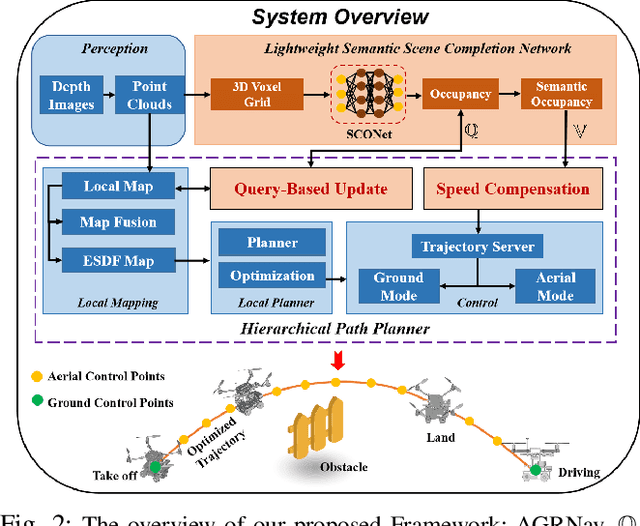
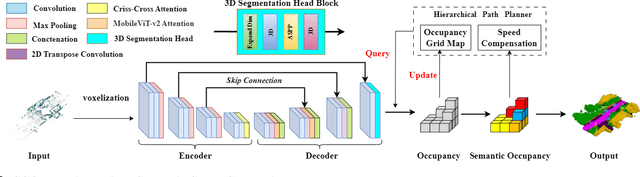
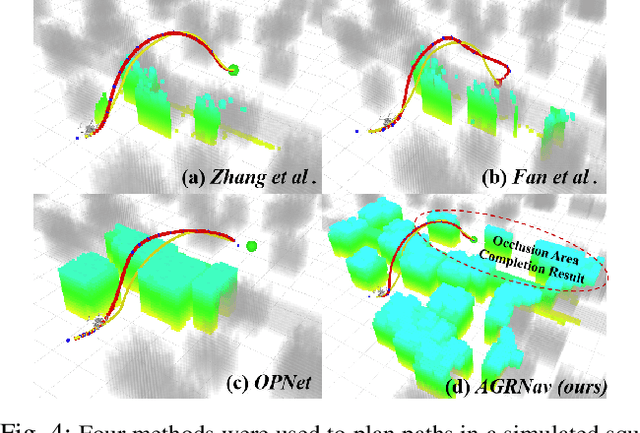
The exceptional mobility and long endurance of air-ground robots are raising interest in their usage to navigate complex environments (e.g., forests and large buildings). However, such environments often contain occluded and unknown regions, and without accurate prediction of unobserved obstacles, the movement of the air-ground robot often suffers a suboptimal trajectory under existing mapping-based and learning-based navigation methods. In this work, we present AGRNav, a novel framework designed to search for safe and energy-saving air-ground hybrid paths. AGRNav contains a lightweight semantic scene completion network (SCONet) with self-attention to enable accurate obstacle predictions by capturing contextual information and occlusion area features. The framework subsequently employs a query-based method for low-latency updates of prediction results to the grid map. Finally, based on the updated map, the hierarchical path planner efficiently searches for energy-saving paths for navigation. We validate AGRNav's performance through benchmarks in both simulated and real-world environments, demonstrating its superiority over classical and state-of-the-art methods. The open-source code is available at https://github.com/jmwang0117/AGRNav.