 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR^2MoE: Redundancy-Removal Mixture of Experts for Lifelong Concept Learning
Jul 17, 2025Enabling large-scale generative models to continuously learn new visual concepts is essential for personalizing pre-trained models to meet individual user preferences. Existing approaches for continual visual concept learning are constrained by two fundamental challenges: catastrophic forgetting and parameter expansion. In this paper, we propose Redundancy-Removal Mixture of Experts (R^2MoE), a parameter-efficient framework for lifelong visual concept learning that effectively learns new concepts while incurring minimal parameter overhead. Our framework includes three key innovative contributions: First, we propose a mixture-of-experts framework with a routing distillation mechanism that enables experts to acquire concept-specific knowledge while preserving the gating network's routing capability, thereby effectively mitigating catastrophic forgetting. Second, we propose a strategy for eliminating redundant layer-wise experts that reduces the number of expert parameters by fully utilizing previously learned experts. Third, we employ a hierarchical local attention-guided inference approach to mitigate interference between generated visual concepts. Extensive experiments have demonstrated that our method generates images with superior conceptual fidelity compared to the state-of-the-art (SOTA) method, achieving an impressive 87.8\% reduction in forgetting rates and 63.3\% fewer parameters on the CustomConcept 101 dataset. Our code is available at {https://github.com/learninginvision/R2MoE}
ARIC: An Activity Recognition Dataset in Classroom Surveillance Images
Oct 16, 2024



The application of activity recognition in the ``AI + Education" field is gaining increasing attention. However, current work mainly focuses on the recognition of activities in manually captured videos and a limited number of activity types, with little attention given to recognizing activities in surveillance images from real classrooms. Activity recognition in classroom surveillance images faces multiple challenges, such as class imbalance and high activity similarity. To address this gap, we constructed a novel multimodal dataset focused on classroom surveillance image activity recognition called ARIC (Activity Recognition In Classroom). The ARIC dataset has advantages of multiple perspectives, 32 activity categories, three modalities, and real-world classroom scenarios. In addition to the general activity recognition tasks, we also provide settings for continual learning and few-shot continual learning. We hope that the ARIC dataset can act as a facilitator for future analysis and research for open teaching scenarios. You can download preliminary data from https://ivipclab.github.io/publication_ARIC/ARIC.
Deep Learning Overloaded Vehicle Identification for Long Span Bridges Based on Structural Health Monitoring Data
Sep 04, 2023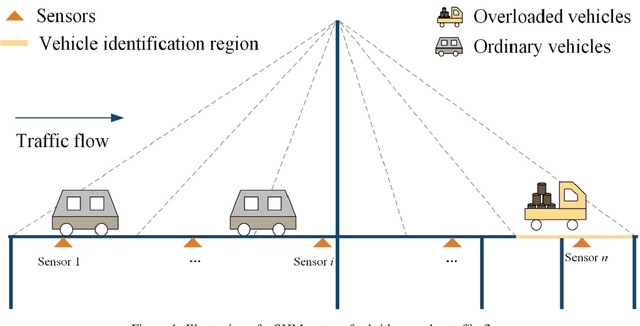

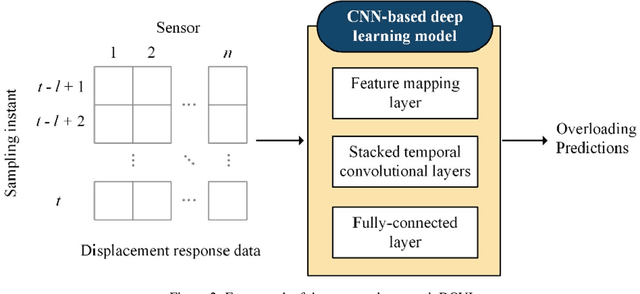

Overloaded vehicles bring great harm to transportation infrastructures. BWIM (bridge weigh-in-motion) method for overloaded vehicle identification is getting more popular because it can be implemented without interruption to the traffic. However, its application is still limited because its effectiveness largely depends on professional knowledge and extra information, and is susceptible to occurrence of multiple vehicles. In this paper, a deep learning based overloaded vehicle identification approach (DOVI) is proposed, with the purpose of overloaded vehicle identification for long-span bridges by the use of structural health monitoring data. The proposed DOVI model uses temporal convolutional architectures to extract the spatial and temporal features of the input sequence data, thus provides an end-to-end overloaded vehicle identification solution which neither needs the influence line nor needs to obtain velocity and wheelbase information in advance and can be applied under the occurrence of multiple vehicles. Model evaluations are conducted on a simply supported beam and a long-span cable-stayed bridge under random traffic flow. Results demonstrate that the proposed deep-learning overloaded vehicle identification approach has better effectiveness and robustness, compared with other machine learning and deep learning approaches.
Path Generation for Wheeled Robots Autonomous Navigation on Vegetated Terrain
Jun 15, 2023



Wheeled robot navigation has been widely used in urban environments, but little research has been conducted on its navigation in wild vegetation. External sensors (LiDAR, camera etc.) are often used to construct point cloud map of the surrounding environment, however, the supporting rigid ground used for travelling cannot be detected due to the occlusion of vegetation. This often causes unsafe or not smooth path during planning process. To address the drawback, we propose the PE-RRT* algorithm, which effectively combines a novel support plane estimation method and sampling algorithm to generate real-time feasible and safe path in vegetation environments. In order to accurately estimate the support plane, we combine external perception and proprioception, and use Multivariate Gaussian Processe Regression (MV-GPR) to estimate the terrain at the sampling nodes. We build a physical experimental platform and conduct experiments in different outdoor environments. Experimental results show that our method has high safety, robustness and generalization.