 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Efficient Trajectory Generation for Ground Robots beyond 2D Environment
Feb 07, 2023



With the development of robotics, ground robots are no longer limited to planar motion. Passive height variation due to complex terrain and active height control provided by special structures on robots require a more general navigation planning framework beyond 2D. Existing methods rarely considers both simultaneously, limiting the capabilities and applications of ground robots. In this paper, we proposed an optimization-based planning framework for ground robots considering both active and passive height changes on the z-axis. The proposed planner first constructs a penalty field for chassis motion constraints defined in R3 such that the optimal solution space of the trajectory is continuous, resulting in a high-quality smooth chassis trajectory. Also, by constructing custom constraints in the z-axis direction, it is possible to plan trajectories for different types of ground robots which have z-axis degree of freedom. We performed simulations and realworld experiments to verify the efficiency and trajectory quality of our algorithm.
ReVoLT: Relational Reasoning and Voronoi Local Graph Planning for Target-driven Navigation
Jan 10, 2023Embodied AI is an inevitable trend that emphasizes the interaction between intelligent entities and the real world, with broad applications in Robotics, especially target-driven navigation. This task requires the robot to find an object of a certain category efficiently in an unknown domestic environment. Recent works focus on exploiting layout relationships by graph neural networks (GNNs). However, most of them obtain robot actions directly from observations in an end-to-end manner via an incomplete relation graph, which is not interpretable and reliable. We decouple this task and propose ReVoLT, a hierarchical framework: (a) an object detection visual front-end, (b) a high-level reasoner (infers semantic sub-goals), (c) an intermediate-level planner (computes geometrical positions), and (d) a low-level controller (executes actions). ReVoLT operates with a multi-layer semantic-spatial topological graph. The reasoner uses multiform structured relations as priors, which are obtained from combinatorial relation extraction networks composed of unsupervised GraphSAGE, GCN, and GraphRNN-based Region Rollout. The reasoner performs with Upper Confidence Bound for Tree (UCT) to infer semantic sub-goals, accounting for trade-offs between exploitation (depth-first searching) and exploration (regretting). The lightweight intermediate-level planner generates instantaneous spatial sub-goal locations via an online constructed Voronoi local graph. The simulation experiments demonstrate that our framework achieves better performance in the target-driven navigation tasks and generalizes well, which has an 80% improvement compared to the existing state-of-the-art method. The code and result video will be released at https://ventusff.github.io/ReVoLT-website/.
Online Multi-Target Tracking for Maneuvering Vehicles in Dynamic Road Context
Dec 02, 2019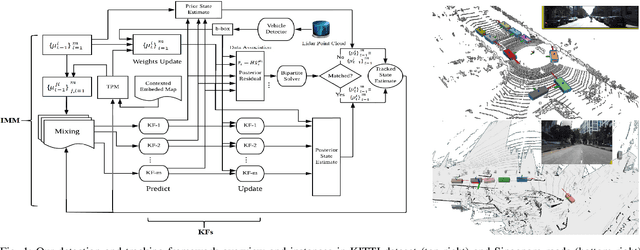
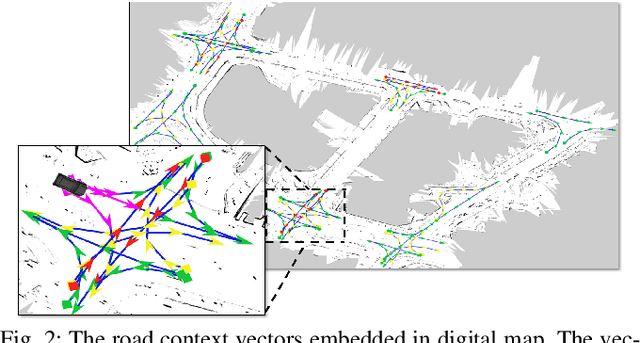
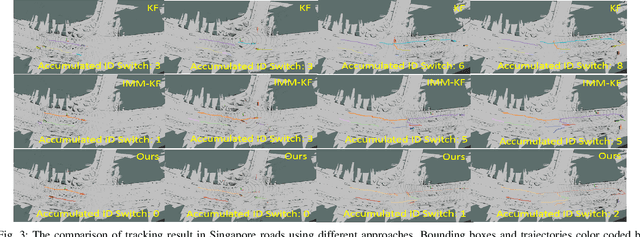
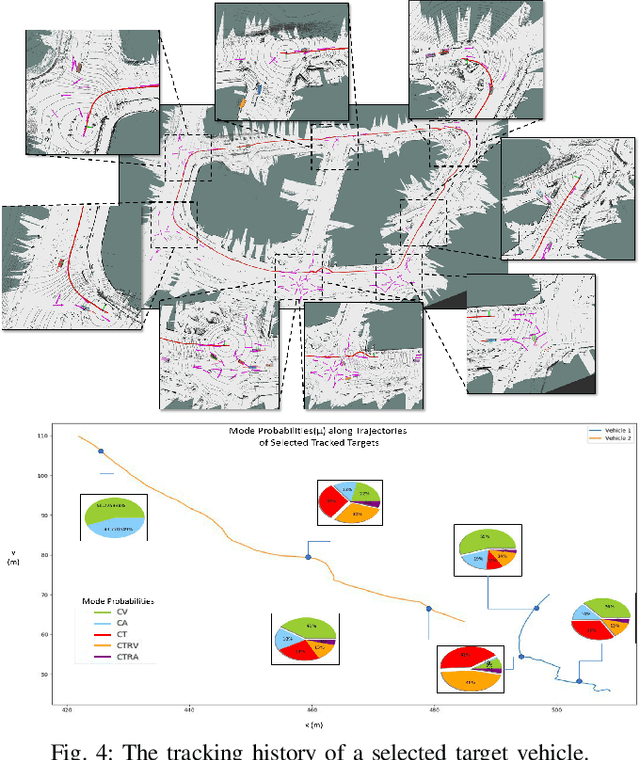
Target detection and tracking provides crucial information for motion planning and decision making in autonomous driving. This paper proposes an online multi-object tracking (MOT) framework with tracking-by-detection for maneuvering vehicles under motion uncertainty in dynamic road context. We employ a point cloud based vehicle detector to provide real-time 3D bounding boxes of detected vehicles and conduct the online bipartite optimization of the maneuver-orientated data association between the detections and the targets. Kalman Filter (KF) is adopted as the backbone for multi-object tracking. In order to entertain the maneuvering uncertainty, we leverage the interacting multiple model (IMM) approach to obtain the \textit{a-posterior} residual as the cost for each association hypothesis, which is calculated with the hybrid model posterior (after mode-switch). Road context is integrated to conduct adjustments of the time varying transition probability matrix (TPM) of the IMM to regulate the maneuvers according to road segments and traffic sign/signals, with which the data association is performed in a unified spatial-temporal fashion. Experiments show our framework is able to effectively track multiple vehicles with maneuvers subject to dynamic road context and localization drift.