 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTaming Generative Synthetic Data for X-ray Prohibited Item Detection
Nov 19, 2025


Training prohibited item detection models requires a large amount of X-ray security images, but collecting and annotating these images is time-consuming and laborious. To address data insufficiency, X-ray security image synthesis methods composite images to scale up datasets. However, previous methods primarily follow a two-stage pipeline, where they implement labor-intensive foreground extraction in the first stage and then composite images in the second stage. Such a pipeline introduces inevitable extra labor cost and is not efficient. In this paper, we propose a one-stage X-ray security image synthesis pipeline (Xsyn) based on text-to-image generation, which incorporates two effective strategies to improve the usability of synthetic images. The Cross-Attention Refinement (CAR) strategy leverages the cross-attention map from the diffusion model to refine the bounding box annotation. The Background Occlusion Modeling (BOM) strategy explicitly models background occlusion in the latent space to enhance imaging complexity. To the best of our knowledge, compared with previous methods, Xsyn is the first to achieve high-quality X-ray security image synthesis without extra labor cost. Experiments demonstrate that our method outperforms all previous methods with 1.2% mAP improvement, and the synthetic images generated by our method are beneficial to improve prohibited item detection performance across various X-ray security datasets and detectors. Code is available at https://github.com/pILLOW-1/Xsyn/.
BGM: Background Mixup for X-ray Prohibited Items Detection
Nov 30, 2024Prohibited item detection is crucial for ensuring public safety, yet current X-ray image-based detection methods often lack comprehensive data-driven exploration. This paper introduces a novel data augmentation approach tailored for prohibited item detection, leveraging unique characteristics inherent to X-ray imagery. Our method is motivated by observations of physical properties including: 1) X-ray Transmission Imagery: Unlike reflected light images, transmitted X-ray pixels represent composite information from multiple materials along the imaging path. 2) Material-based Pseudo-coloring: Pseudo-color rendering in X-ray images correlates directly with material properties, aiding in material distinction. Building on a novel perspective from physical properties, we propose a simple yet effective X-ray image augmentation technique, Background Mixup (BGM), for prohibited item detection in security screening contexts. The essence is the rich background simulation of X-ray images to induce the model to increase its attention to the foreground. The approach introduces 1) contour information of baggage and 2) variation of material information into the original image by Mixup at patch level. Background Mixup is plug-and-play, parameter-free, highly generalizable and provides an effective solution to the limitations of classical visual augmentations in non-reflected light imagery. When implemented with different high-performance detectors, our augmentation method consistently boosts performance across diverse X-ray datasets from various devices and environments. Extensive experimental results demonstrate that our approach surpasses strong baselines while maintaining similar training resources.
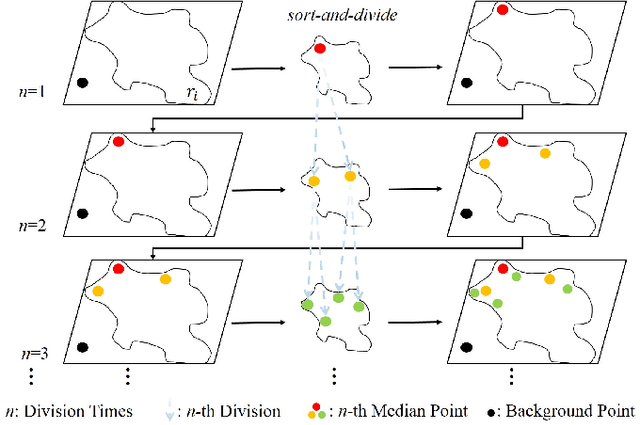
Towards Optimal Filter Pruning with Balanced Performance and Pruning Speed
Oct 14, 2020
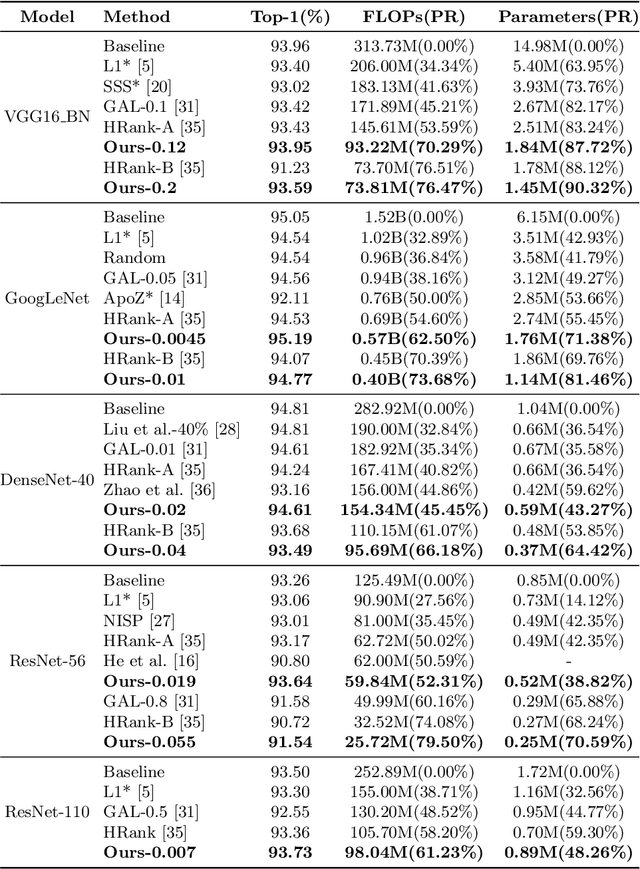
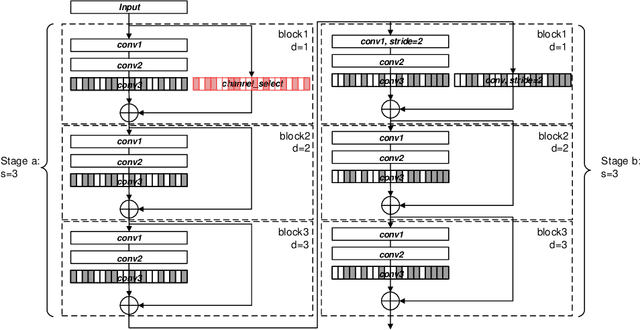

Filter pruning has drawn more attention since resource constrained platform requires more compact model for deployment. However, current pruning methods suffer either from the inferior performance of one-shot methods, or the expensive time cost of iterative training methods. In this paper, we propose a balanced filter pruning method for both performance and pruning speed. Based on the filter importance criteria, our method is able to prune a layer with approximate layer-wise optimal pruning rate at preset loss variation. The network is pruned in the layer-wise way without the time consuming prune-retrain iteration. If a pre-defined pruning rate for the entire network is given, we also introduce a method to find the corresponding loss variation threshold with fast converging speed. Moreover, we propose the layer group pruning and channel selection mechanism for channel alignment in network with short connections. The proposed pruning method is widely applicable to common architectures and does not involve any additional training except the final fine-tuning. Comprehensive experiments show that our method outperforms many state-of-the-art approaches.
Saliency based Semi-supervised Learning for Orbiting Satellite Tracking
Sep 09, 2019

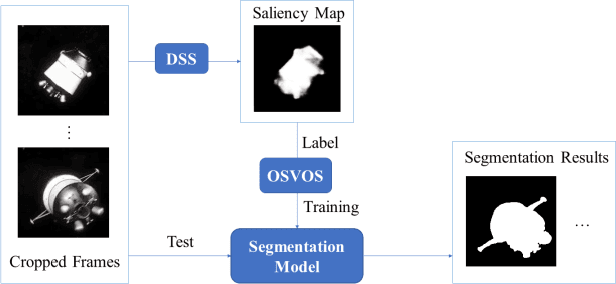
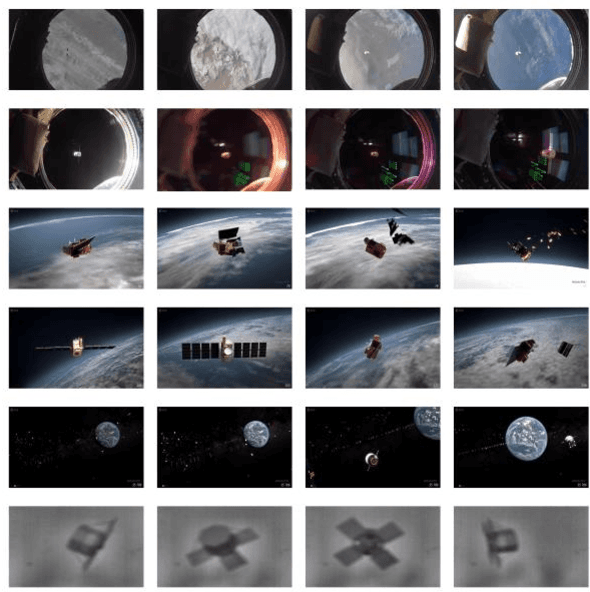
The trajectory and boundary of an orbiting satellite are fundamental information for on-orbit repairing and manipulation by space robots. This task, however, is challenging owing to the freely and rapidly motion of on-orbiting satellites, the quickly varying background and the sudden change in illumination conditions. Traditional tracking usually relies on a single bounding box of the target object, however, more detailed information should be provided by visual tracking such as binary mask. In this paper, we proposed a SSLT (Saliency-based Semi-supervised Learning for Tracking) algorithm that provides both the bounding box and segmentation binary mask of target satellites at 12 frame per second without requirement of annotated data. Our method, SSLT, improves the segmentation performance by generating a saliency map based semi-supervised on-line learning approach within the initial bounding box estimated by tracking. Once a customized segmentation model has been trained, the bounding box and satellite trajectory will be refined using the binary segmentation result. Experiment using real on-orbit rendezvous and docking video from NASA (Nation Aeronautics and Space Administration), simulated satellite animation sequence from ESA (European Space Agency) and image sequences of 3D printed satellite model took in our laboratory demonstrate the robustness, versatility and fast speed of our method compared to state-of-the-art tracking and segmentation methods. Our dataset will be released for academic use in future.
MVB: A Large-Scale Dataset for Baggage Re-Identification and Merged Siamese Networks
Jul 26, 2019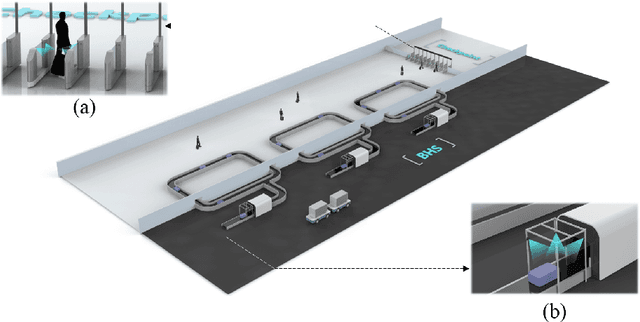


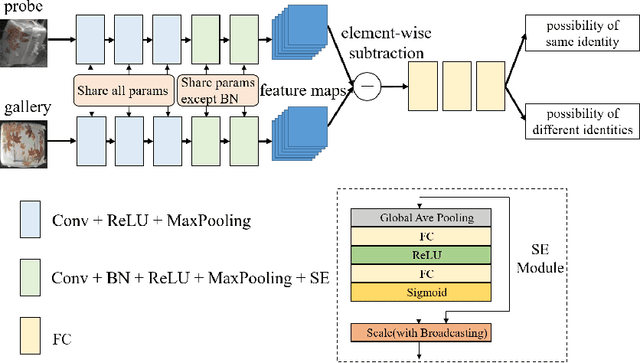
In this paper, we present a novel dataset named MVB (Multi View Baggage) for baggage ReID task which has some essential differences from person ReID. The features of MVB are three-fold. First, MVB is the first publicly released large-scale dataset that contains 4519 baggage identities and 22660 annotated baggage images as well as its surface material labels. Second, all baggage images are captured by specially-designed multi-view camera system to handle pose variation and occlusion, in order to obtain the 3D information of baggage surface as complete as possible. Third, MVB has remarkable inter-class similarity and intra-class dissimilarity, considering the fact that baggage might have very similar appearance while the data is collected in two real airport environments, where imaging factors varies significantly from each other. Moreover, we proposed a merged Siamese network as baseline model and evaluated its performance. Experiments and case study are conducted on MVB.