 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSaliency based Semi-supervised Learning for Orbiting Satellite Tracking
Paper and Code
Sep 09, 2019

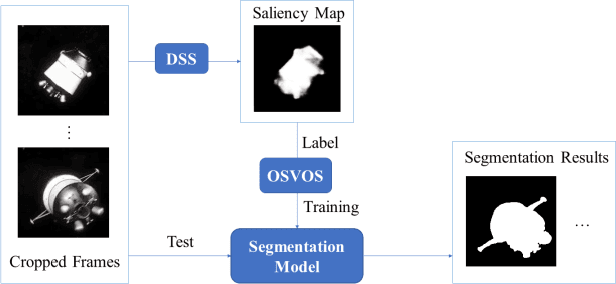
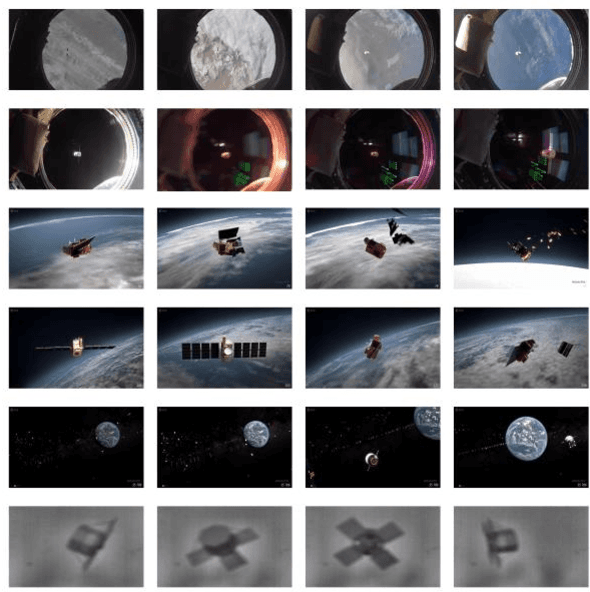
The trajectory and boundary of an orbiting satellite are fundamental information for on-orbit repairing and manipulation by space robots. This task, however, is challenging owing to the freely and rapidly motion of on-orbiting satellites, the quickly varying background and the sudden change in illumination conditions. Traditional tracking usually relies on a single bounding box of the target object, however, more detailed information should be provided by visual tracking such as binary mask. In this paper, we proposed a SSLT (Saliency-based Semi-supervised Learning for Tracking) algorithm that provides both the bounding box and segmentation binary mask of target satellites at 12 frame per second without requirement of annotated data. Our method, SSLT, improves the segmentation performance by generating a saliency map based semi-supervised on-line learning approach within the initial bounding box estimated by tracking. Once a customized segmentation model has been trained, the bounding box and satellite trajectory will be refined using the binary segmentation result. Experiment using real on-orbit rendezvous and docking video from NASA (Nation Aeronautics and Space Administration), simulated satellite animation sequence from ESA (European Space Agency) and image sequences of 3D printed satellite model took in our laboratory demonstrate the robustness, versatility and fast speed of our method compared to state-of-the-art tracking and segmentation methods. Our dataset will be released for academic use in future.