 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinWiFi: A Reinforcement-Learning-Based Framework for the Application-Layer QoS Optimization of WiFi Networks
May 06, 2024



In this paper, a reinforcement-learning-based scheduling framework is proposed and implemented to optimize the application-layer quality-of-service (QoS) of a practical wireless local area network (WLAN) suffering from unknown interference. Particularly, application-layer tasks of file delivery and delay-sensitive communication, e.g., screen projection, in a WLAN with enhanced distributed channel access (EDCA) mechanism, are jointly scheduled by adjusting the contention window sizes and application-layer throughput limitation, such that their QoS, including the throughput of file delivery and the round trip time of the delay-sensitive communication, can be optimized. Due to the unknown interference and vendor-dependent implementation of the network interface card, the relation between the scheduling policy and the system QoS is unknown. Hence, a reinforcement learning method is proposed, in which a novel Q-network is trained to map from the historical scheduling parameters and QoS observations to the current scheduling action. It is demonstrated on a testbed that the proposed framework can achieve a significantly better QoS than the conventional EDCA mechanism.
Robotic Wireless Energy Transfer in Dynamic Environments: System Design and Experimental Validation
Feb 10, 2022


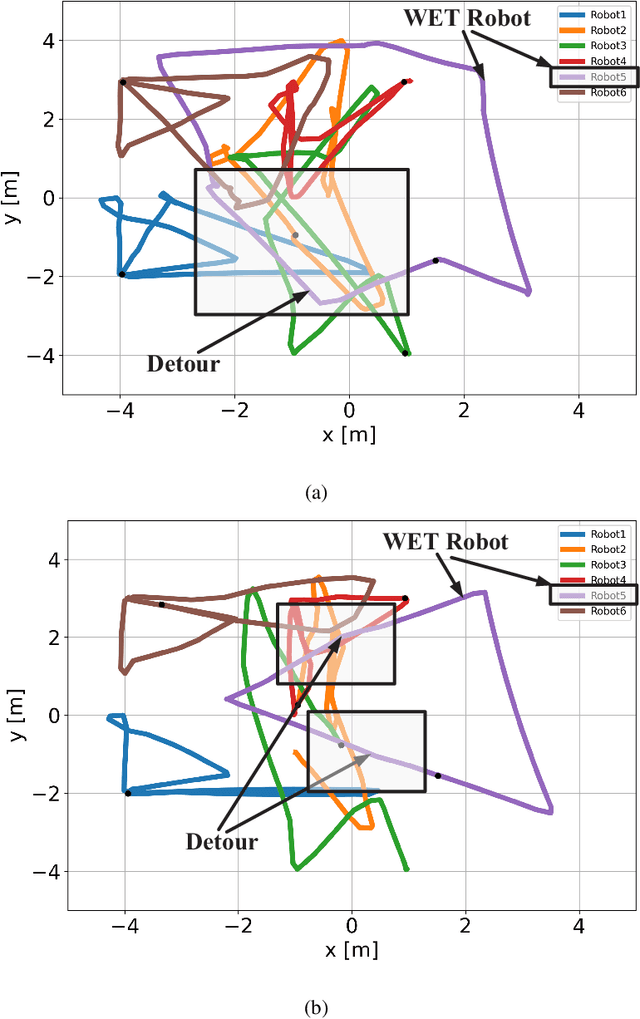
Wireless energy transfer (WET) is a ground-breaking technology for cutting the last wire between mobile sensors and power grids in smart cities. Yet, WET only offers effective transmission of energy over a short distance. Robotic WET is an emerging paradigm that mounts the energy transmitter on a mobile robot and navigates the robot through different regions in a large area to charge remote energy harvesters. However, it is challenging to determine the robotic charging strategy in an unknown and dynamic environment due to the uncertainty of obstacles. This paper proposes a hardware-in-the-loop joint optimization framework that offers three distinctive features: 1) efficient model updates and re-optimization based on the last-round experimental data; 2) iterative refinement of the anchor list for adaptation to different environments; 3) verification of algorithms in a high-fidelity Gazebo simulator and a multi-robot testbed. Experimental results show that the proposed framework significantly saves the WET mission completion time while satisfying collision avoidance and energy harvesting constraints.
* single column, 18 pages, 6 figures, to appear in IEEE Communications Magazine
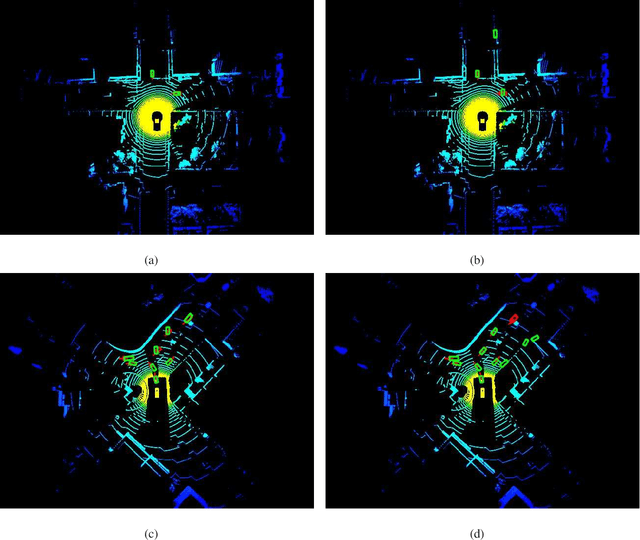
Distributed Dynamic Map Fusion via Federated Learning for Intelligent Networked Vehicles
Mar 05, 2021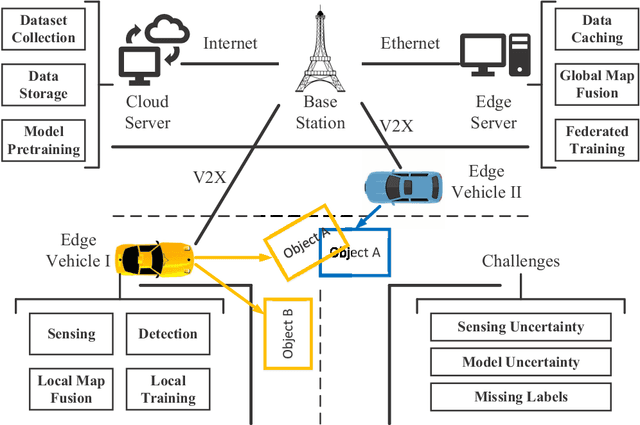


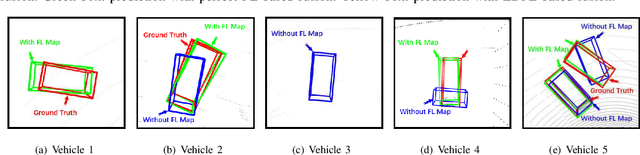
The technology of dynamic map fusion among networked vehicles has been developed to enlarge sensing ranges and improve sensing accuracies for individual vehicles. This paper proposes a federated learning (FL) based dynamic map fusion framework to achieve high map quality despite unknown numbers of objects in fields of view (FoVs), various sensing and model uncertainties, and missing data labels for online learning. The novelty of this work is threefold: (1) developing a three-stage fusion scheme to predict the number of objects effectively and to fuse multiple local maps with fidelity scores; (2) developing an FL algorithm which fine-tunes feature models (i.e., representation learning networks for feature extraction) distributively by aggregating model parameters; (3) developing a knowledge distillation method to generate FL training labels when data labels are unavailable. The proposed framework is implemented in the Car Learning to Act (CARLA) simulation platform. Extensive experimental results are provided to verify the superior performance and robustness of the developed map fusion and FL schemes.
Edge Federated Learning Via Unit-Modulus Over-The-Air Computation
Feb 16, 2021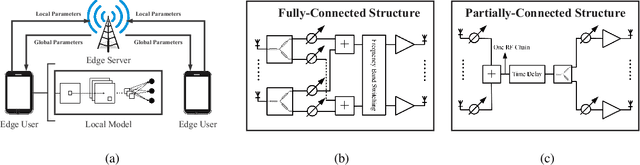

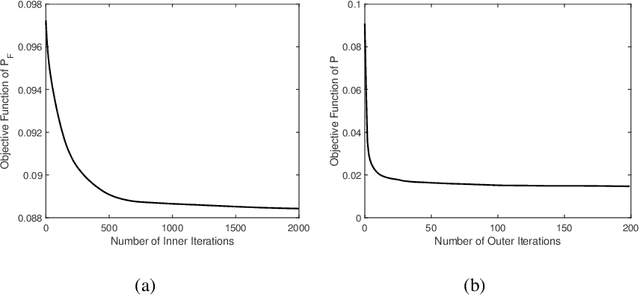

Edge federated learning (FL) is an emerging machine learning paradigm that trains a global parametric model from distributed datasets via wireless communications. This paper proposes a unit-modulus over-the-air computation (UM-AirComp) framework to facilitate efficient edge federated learning, which simultaneously uploads local model parameters and updates global model parameters via analog beamforming. The proposed framework avoids sophisticated baseband signal processing, leading to low communication delays and implementation costs. A training loss bound of UM-AirComp is derived and two low-complexity algorithms, termed penalty alternating minimization (PAM) and accelerated gradient projection (AGP), are proposed to minimize the nonconvex nonsmooth loss bound. Simulation results show that the proposed UM-AirComp framework with PAM algorithm not only achieves a smaller mean square error of model parameters' estimation, training loss, and testing error, but also requires a significantly shorter runtime than that of other benchmark schemes. Moreover, the proposed UM-AirComp framework with AGP algorithm achieves satisfactory performance while reduces the computational complexity by orders of magnitude compared with existing optimization algorithms. Finally, we demonstrate the implementation of UM-AirComp in a vehicle-to-everything autonomous driving simulation platform. It is found that autonomous driving tasks are more sensitive to model parameter errors than other tasks since the former neural networks are more sophisticated containing sparser model parameters.
Learning Centric Wireless Resource Allocation for Edge Computing: Algorithm and Experiment
Oct 29, 2020
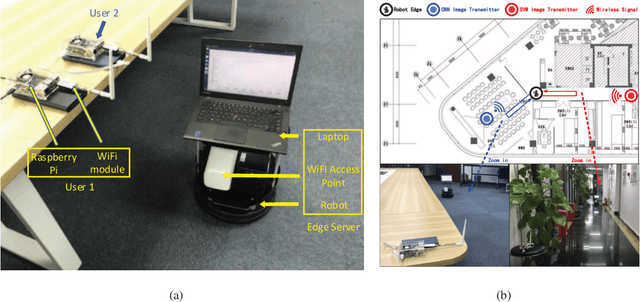

Edge intelligence is an emerging network architecture that integrates sensing, communication, computing components, and supports various machine learning applications, where a fundamental communication question is: how to allocate the limited wireless resources (such as time, energy) to the simultaneous model training of heterogeneous learning tasks? Existing methods ignore two important facts: 1) different models have heterogeneous demands on training data; 2) there is a mismatch between the simulated environment and the real-world environment. As a result, they could lead to low learning performance in practice. This paper proposes the learning centric wireless resource allocation (LCWRA) scheme that maximizes the worst learning performance of multiple classification tasks. Analysis shows that the optimal transmission time has an inverse power relationship with respect to the classification error. Finally, both simulation and experimental results are provided to verify the performance of the proposed LCWRA scheme and its robustness in real implementation.