 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSitPose: Real-Time Detection of Sitting Posture and Sedentary Behavior Using Ensemble Learning With Depth Sensor
Dec 16, 2024



Poor sitting posture can lead to various work-related musculoskeletal disorders (WMSDs). Office employees spend approximately 81.8% of their working time seated, and sedentary behavior can result in chronic diseases such as cervical spondylosis and cardiovascular diseases. To address these health concerns, we present SitPose, a sitting posture and sedentary detection system utilizing the latest Kinect depth camera. The system tracks 3D coordinates of bone joint points in real-time and calculates the angle values of related joints. We established a dataset containing six different sitting postures and one standing posture, totaling 33,409 data points, by recruiting 36 participants. We applied several state-of-the-art machine learning algorithms to the dataset and compared their performance in recognizing the sitting poses. Our results show that the ensemble learning model based on the soft voting mechanism achieves the highest F1 score of 98.1%. Finally, we deployed the SitPose system based on this ensemble model to encourage better sitting posture and to reduce sedentary habits.
Real-Time Fall Detection Using Smartphone Accelerometers and WiFi Channel State Information
Dec 13, 2024
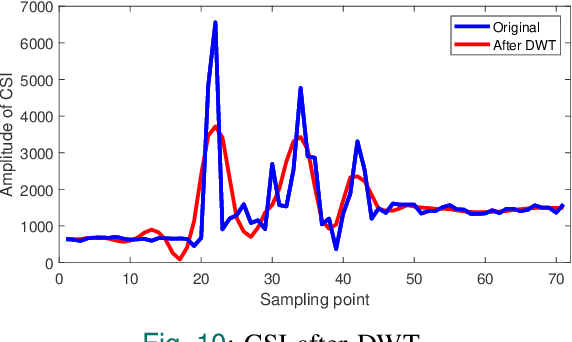
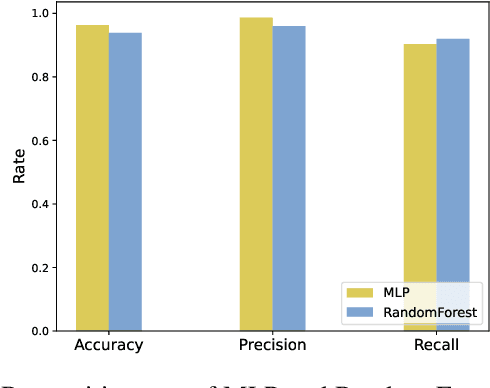
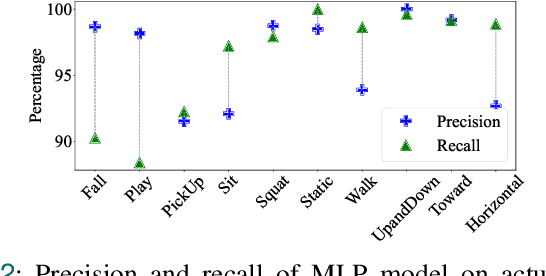
In recent years, as the population ages, falls have increasingly posed a significant threat to the health of the elderly. We propose a real-time fall detection system that integrates the inertial measurement unit (IMU) of a smartphone with optimized Wi-Fi channel state information (CSI) for secondary validation. Initially, the IMU distinguishes falls from routine daily activities with minimal computational demand. Subsequently, the CSI is employed for further assessment, which includes evaluating the individual's post-fall mobility. This methodology not only achieves high accuracy but also reduces energy consumption in the smartphone platform. An Android application developed specifically for the purpose issues an emergency alert if the user experiences a fall and is unable to move. Experimental results indicate that the CSI model, based on convolutional neural networks (CNN), achieves a detection accuracy of 99%, \revised{surpassing comparable IMU-only models, and demonstrating significant resilience in distinguishing between falls and non-fall activities.
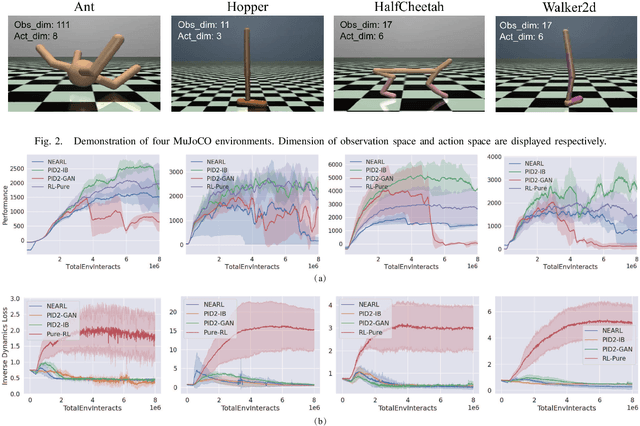
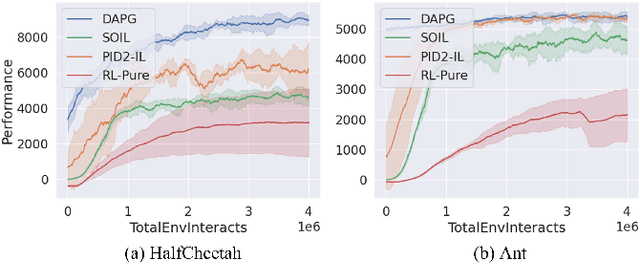
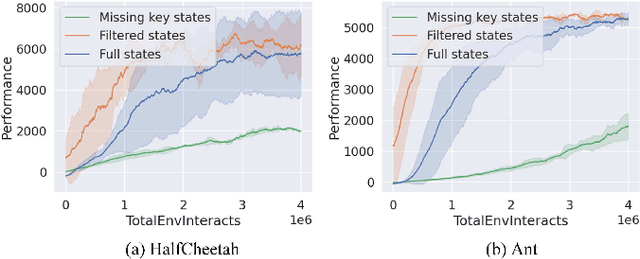
NEARL: Non-Explicit Action Reinforcement Learning for Robotic Control
Nov 02, 2020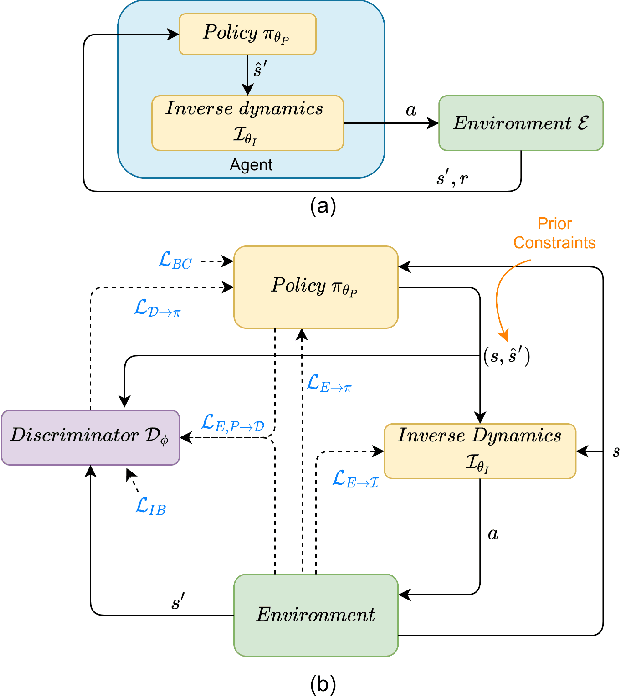
Traditionally, reinforcement learning methods predict the next action based on the current state. However, in many situations, directly applying actions to control systems or robots is dangerous and may lead to unexpected behaviors because action is rather low-level. In this paper, we propose a novel hierarchical reinforcement learning framework without explicit action. Our meta policy tries to manipulate the next optimal state and actual action is produced by the inverse dynamics model. To stabilize the training process, we integrate adversarial learning and information bottleneck into our framework. Under our framework, widely available state-only demonstrations can be exploited effectively for imitation learning. Also, prior knowledge and constraints can be applied to meta policy. We test our algorithm in simulation tasks and its combination with imitation learning. The experimental results show the reliability and robustness of our algorithms.