 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo-stream network-driven vision-based tactile sensor for object feature extraction and fusion perception
Oct 14, 2025



Tactile perception is crucial for embodied intelligent robots to recognize objects. Vision-based tactile sensors extract object physical attributes multidimensionally using high spatial resolution; however, this process generates abundant redundant information. Furthermore, single-dimensional extraction, lacking effective fusion, fails to fully characterize object attributes. These challenges hinder the improvement of recognition accuracy. To address this issue, this study introduces a two-stream network feature extraction and fusion perception strategy for vision-based tactile systems. This strategy employs a distributed approach to extract internal and external object features. It obtains depth map information through three-dimensional reconstruction while simultaneously acquiring hardness information by measuring contact force data. After extracting features with a convolutional neural network (CNN), weighted fusion is applied to create a more informative and effective feature representation. In standard tests on objects of varying shapes and hardness, the force prediction error is 0.06 N (within a 12 N range). Hardness recognition accuracy reaches 98.0%, and shape recognition accuracy reaches 93.75%. With fusion algorithms, object recognition accuracy in actual grasping scenarios exceeds 98.5%. Focused on object physical attributes perception, this method enhances the artificial tactile system ability to transition from perception to cognition, enabling its use in embodied perception applications.
Enhanced Information Extraction from Cylindrical Visual-Tactile Sensors via Image Fusion
Nov 07, 2023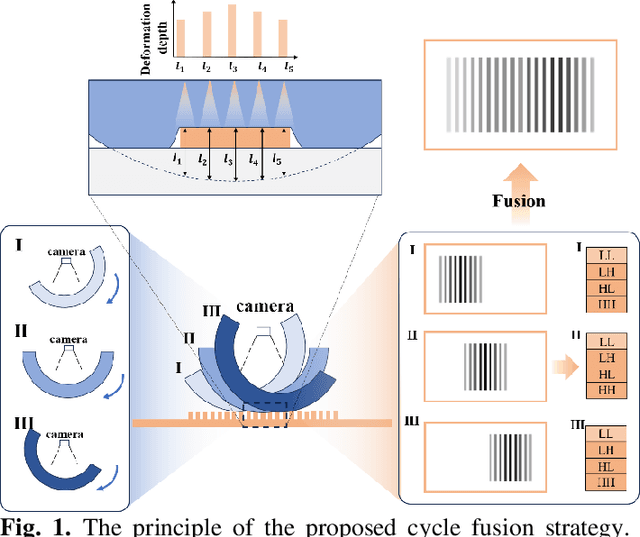
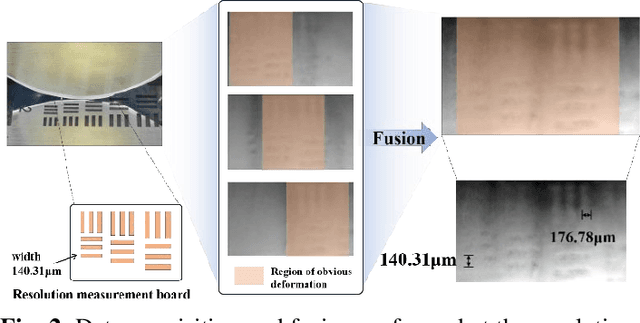


Vision-based tactile sensors equipped with planar contact structures acquire the shape, force, and motion states of objects in contact. The limited planar contact area presents a challenge in acquiring information about larger target objects. In contrast, vision-based tactile sensors with cylindrical contact structures could extend the contact area by rolling, which can acquire much tactile information that exceeds the sensing projection area in a single contact. However, the tactile data acquired by cylindrical structures does not consistently correspond to the same depth level. Therefore, stitching and analyzing the data in an extended contact area is a challenging problem. In this work, we propose an image fusion method based on cylindrical vision-based tactile sensors. The method takes advantage of the changing characteristics of the contact depth of cylindrical structures, extracts the effective information of different contact depths in the frequency domain, and performs differential fusion for the information characteristics. The results show that in object contact confronting an area larger than single sensing, the images fused with our proposed method have higher information and structural similarity compared with the method of stitching based on motion distance sampling. Meanwhile, it is robust to sampling time. We complement this method with a deep neural network to illustrate its potential for fusing and recognizing object contact information using cylindrical vision-based tactile sensors.
A Vision-Based Tactile Sensing System for Multimodal Contact Information Perception via Neural Network
Oct 03, 2023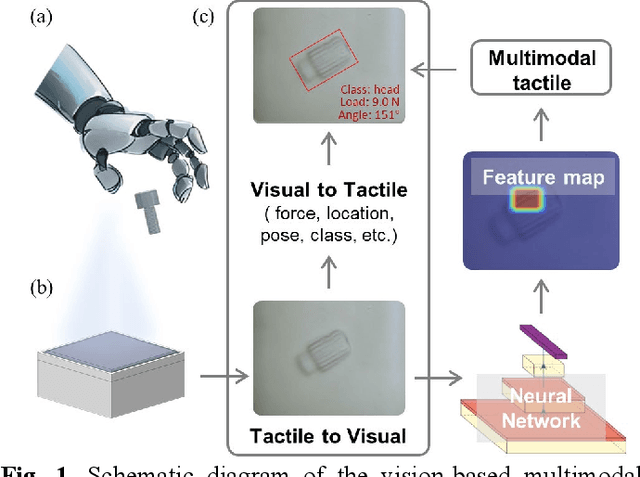
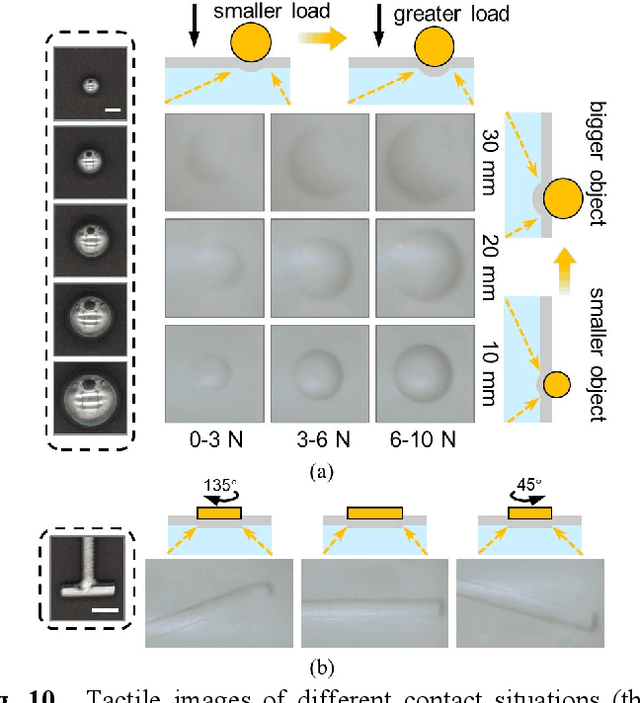
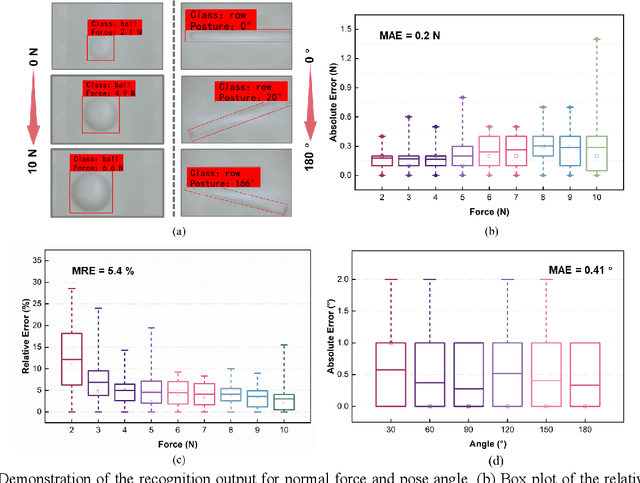
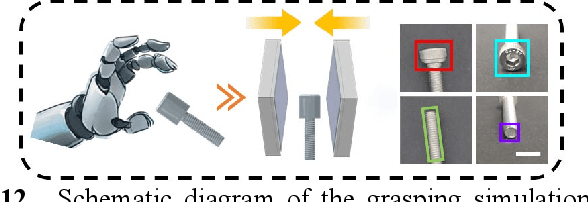
In general, robotic dexterous hands are equipped with various sensors for acquiring multimodal contact information such as position, force, and pose of the grasped object. This multi-sensor-based design adds complexity to the robotic system. In contrast, vision-based tactile sensors employ specialized optical designs to enable the extraction of tactile information across different modalities within a single system. Nonetheless, the decoupling design for different modalities in common systems is often independent. Therefore, as the dimensionality of tactile modalities increases, it poses more complex challenges in data processing and decoupling, thereby limiting its application to some extent. Here, we developed a multimodal sensing system based on a vision-based tactile sensor, which utilizes visual representations of tactile information to perceive the multimodal contact information of the grasped object. The visual representations contain extensive content that can be decoupled by a deep neural network to obtain multimodal contact information such as classification, position, posture, and force of the grasped object. The results show that the tactile sensing system can perceive multimodal tactile information using only one single sensor and without different data decoupling designs for different modal tactile information, which reduces the complexity of the tactile system and demonstrates the potential for multimodal tactile integration in various fields such as biomedicine, biology, and robotics.
XFL: A High Performace, Lightweighted Federated Learning Framework
Feb 10, 2023



This paper introduces XFL, an industrial-grade federated learning project. XFL supports training AI models collaboratively on multiple devices, while utilizes homomorphic encryption, differential privacy, secure multi-party computation and other security technologies ensuring no leakage of data. XFL provides an abundant algorithms library, integrating a large number of pre-built, secure and outstanding federated learning algorithms, covering both the horizontally and vertically federated learning scenarios. Numerical experiments have shown the prominent performace of these algorithms. XFL builds a concise configuration interfaces with presettings for all federation algorithms, and supports the rapid deployment via docker containers.Therefore, we believe XFL is the most user-friendly and easy-to-develop federated learning framework. XFL is open-sourced, and both the code and documents are available at https://github.com/paritybit-ai/XFL.