 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Vision-Based Tactile Sensing System for Multimodal Contact Information Perception via Neural Network
Oct 03, 2023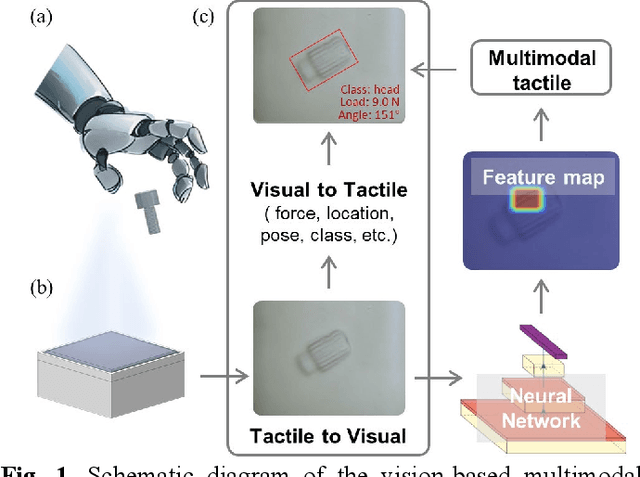
In general, robotic dexterous hands are equipped with various sensors for acquiring multimodal contact information such as position, force, and pose of the grasped object. This multi-sensor-based design adds complexity to the robotic system. In contrast, vision-based tactile sensors employ specialized optical designs to enable the extraction of tactile information across different modalities within a single system. Nonetheless, the decoupling design for different modalities in common systems is often independent. Therefore, as the dimensionality of tactile modalities increases, it poses more complex challenges in data processing and decoupling, thereby limiting its application to some extent. Here, we developed a multimodal sensing system based on a vision-based tactile sensor, which utilizes visual representations of tactile information to perceive the multimodal contact information of the grasped object. The visual representations contain extensive content that can be decoupled by a deep neural network to obtain multimodal contact information such as classification, position, posture, and force of the grasped object. The results show that the tactile sensing system can perceive multimodal tactile information using only one single sensor and without different data decoupling designs for different modal tactile information, which reduces the complexity of the tactile system and demonstrates the potential for multimodal tactile integration in various fields such as biomedicine, biology, and robotics.