 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHI-Series Algorithms A Hybrid of Substance Diffusion Algorithm and Collaborative Filtering
Mar 03, 2025



Recommendation systems face the challenge of balancing accuracy and diversity, as traditional collaborative filtering (CF) and network-based diffusion algorithms exhibit complementary limitations. While item-based CF (ItemCF) enhances diversity through item similarity, it compromises accuracy. Conversely, mass diffusion (MD) algorithms prioritize accuracy by favoring popular items but lack diversity. To address this trade-off, we propose the HI-series algorithms, hybrid models integrating ItemCF with diffusion-based approaches (MD, HHP, BHC, BD) through a nonlinear combination controlled by parameter $\epsilon$. This hybridization leverages ItemCF's diversity and MD's accuracy, extending to advanced diffusion models (HI-HHP, HI-BHC, HI-BD) for enhanced performance. Experiments on MovieLens, Netflix, and RYM datasets demonstrate that HI-series algorithms significantly outperform their base counterparts. In sparse data ($20\%$ training), HI-MD achieves a $0.8\%$-$4.4\%$ improvement in F1-score over MD while maintaining higher diversity (Diversity@20: 459 vs. 396 on MovieLens). For dense data ($80\%$ training), HI-BD improves F1-score by $2.3\%$-$5.2\%$ compared to BD, with diversity gains up to $18.6\%$. Notably, hybrid models consistently enhance novelty in sparse settings and exhibit robust parameter adaptability. The results validate that strategic hybridization effectively breaks the accuracy-diversity trade-off, offering a flexible framework for optimizing recommendation systems across data sparsity levels.
Playing Language Game with LLMs Leads to Jailbreaking
Nov 16, 2024



The advent of large language models (LLMs) has spurred the development of numerous jailbreak techniques aimed at circumventing their security defenses against malicious attacks. An effective jailbreak approach is to identify a domain where safety generalization fails, a phenomenon known as mismatched generalization. In this paper, we introduce two novel jailbreak methods based on mismatched generalization: natural language games and custom language games, both of which effectively bypass the safety mechanisms of LLMs, with various kinds and different variants, making them hard to defend and leading to high attack rates. Natural language games involve the use of synthetic linguistic constructs and the actions intertwined with these constructs, such as the Ubbi Dubbi language. Building on this phenomenon, we propose the custom language games method: by engaging with LLMs using a variety of custom rules, we successfully execute jailbreak attacks across multiple LLM platforms. Extensive experiments demonstrate the effectiveness of our methods, achieving success rates of 93% on GPT-4o, 89% on GPT-4o-mini and 83% on Claude-3.5-Sonnet. Furthermore, to investigate the generalizability of safety alignments, we fine-tuned Llama-3.1-70B with the custom language games to achieve safety alignment within our datasets and found that when interacting through other language games, the fine-tuned models still failed to identify harmful content. This finding indicates that the safety alignment knowledge embedded in LLMs fails to generalize across different linguistic formats, thus opening new avenues for future research in this area.
Near-Optimal Trajectory Design and Restoration Areas Allocation for UAV-Enabled Grassland Restoration
Apr 10, 2022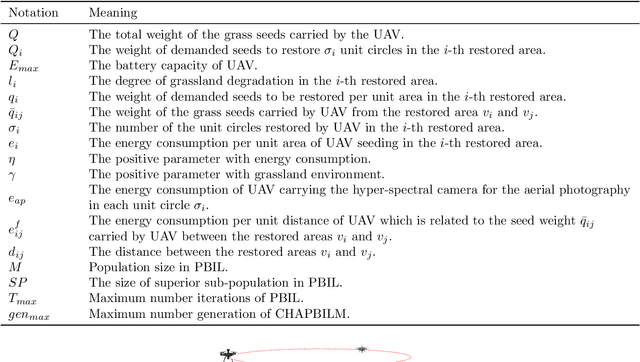
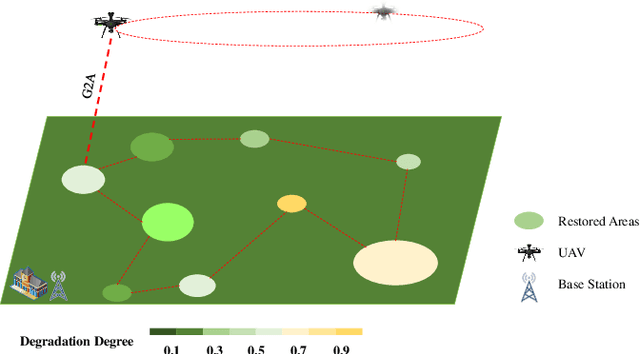
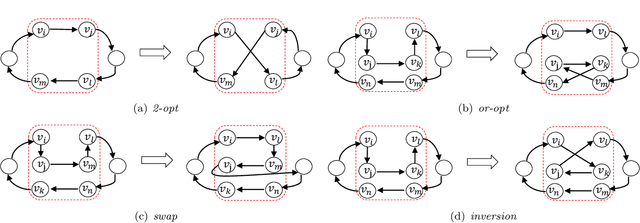
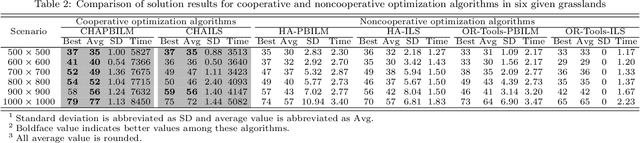
Grassland restoration is a critical means to safeguard grassland ecological degradation. This work considers the maximization restoration areas problem for UAV-enabled grassland restoration method in a restoration process, which is a precise restoration scheme. We first formulate the problem as a multivariable combinatorial optimization problem. By analyzing the characteristics of the optimization problem, it can be decomposed into the two stages: UAV trajectory design and restoration areas allocation. On this basis, the problem can be regarded as a composite problem of traveling salesman problem (TSP) and multidimensional knapsack problem (MKP). Unlike the single combinatorial optimization problem, the coupling relationship between them makes the problem difficult to directly solve by employing the single stage traditional methods. To effectively solve without ignoring the dependence between the two stages, we develop a cooperative optimization algorithm based on heuristic algorithm and population-based incremental learning (PBIL) incorporated with a maximum-residual-energy-based local search (MRELS) strategy, called CHAPBILM, to deal with this problem under constraint conditions of the UAV energy, the total seeds weight, and the number of restored areas. The simulation studies demonstrate that the proposed cooperative optimization method is effective for UAV-enabled grassland restoration problem and can significantly outperform the noncooperative optimization methods, which also verifies the dependency relationship between UAV trajectory design and restoration areas allocation.
Multi-Target Deep Learning for Algal Detection and Classification
May 07, 2020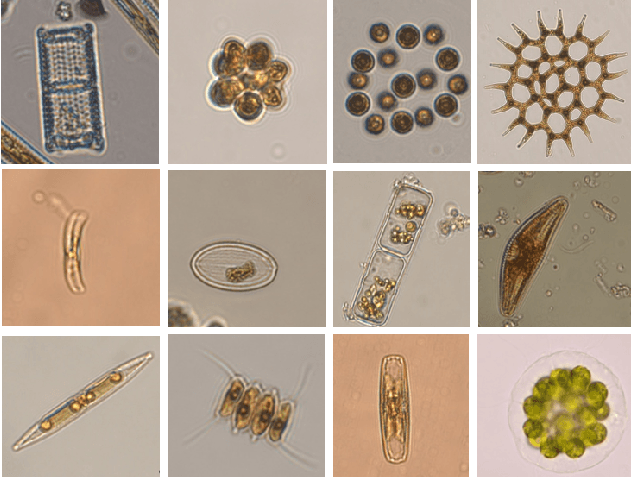
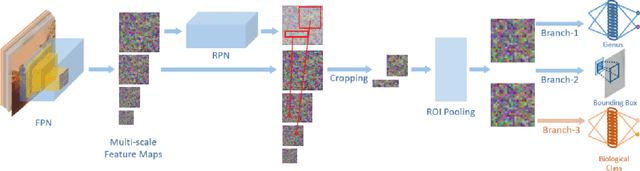
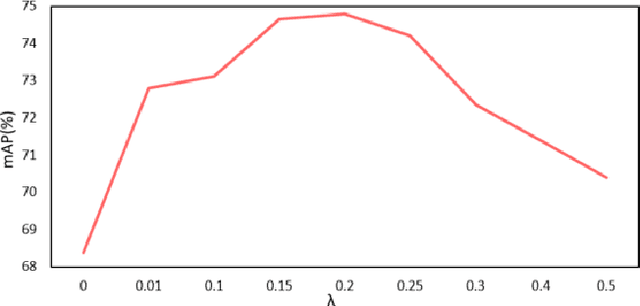
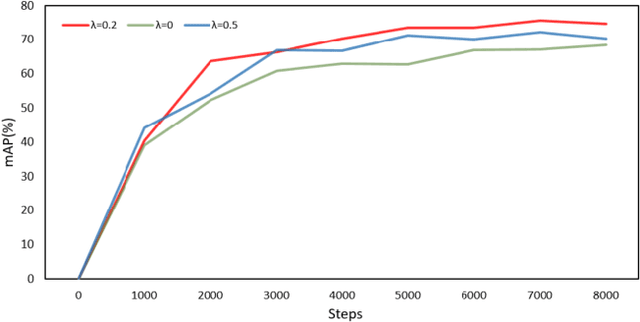
Water quality has a direct impact on industry, agriculture, and public health. Algae species are common indicators of water quality. It is because algal communities are sensitive to changes in their habitats, giving valuable knowledge on variations in water quality. However, water quality analysis requires professional inspection of algal detection and classification under microscopes, which is very time-consuming and tedious. In this paper, we propose a novel multi-target deep learning framework for algal detection and classification. Extensive experiments were carried out on a large-scale colored microscopic algal dataset. Experimental results demonstrate that the proposed method leads to the promising performance on algal detection, class identification and genus identification.