 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIROS 2019 Lifelong Robotic Vision Challenge -- Lifelong Object Recognition Report
Apr 26, 2020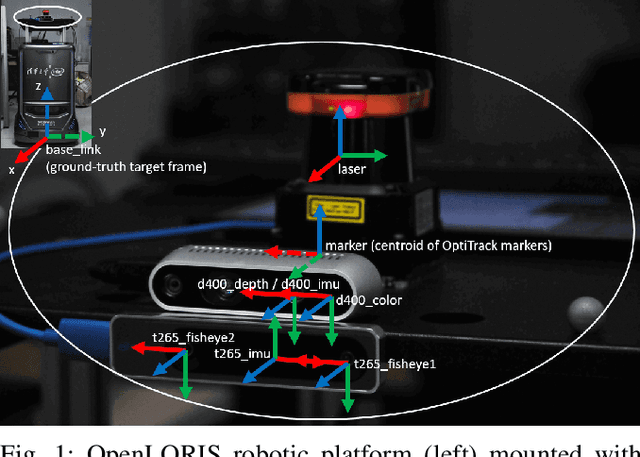
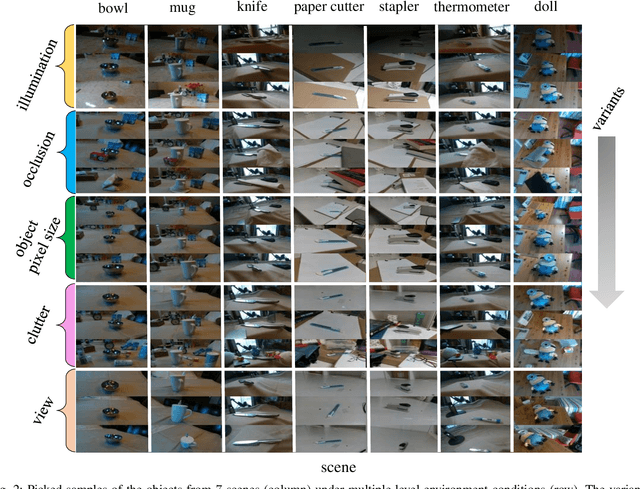
This report summarizes IROS 2019-Lifelong Robotic Vision Competition (Lifelong Object Recognition Challenge) with methods and results from the top $8$ finalists (out of over~$150$ teams). The competition dataset (L)ifel(O)ng (R)obotic V(IS)ion (OpenLORIS) - Object Recognition (OpenLORIS-object) is designed for driving lifelong/continual learning research and application in robotic vision domain, with everyday objects in home, office, campus, and mall scenarios. The dataset explicitly quantifies the variants of illumination, object occlusion, object size, camera-object distance/angles, and clutter information. Rules are designed to quantify the learning capability of the robotic vision system when faced with the objects appearing in the dynamic environments in the contest. Individual reports, dataset information, rules, and released source code can be found at the project homepage: "https://lifelong-robotic-vision.github.io/competition/".
Sequential Neural Processes
Jul 14, 2019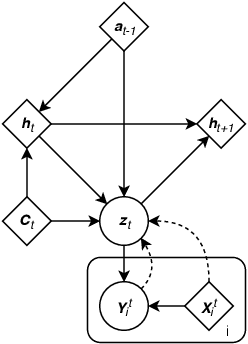
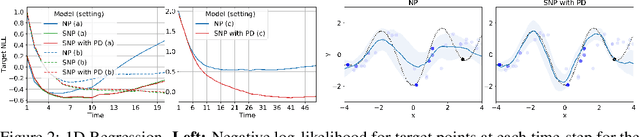
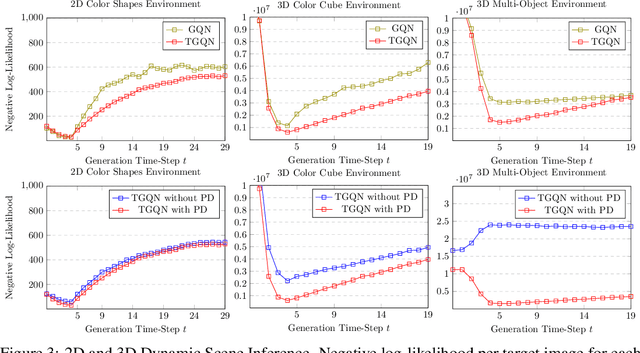
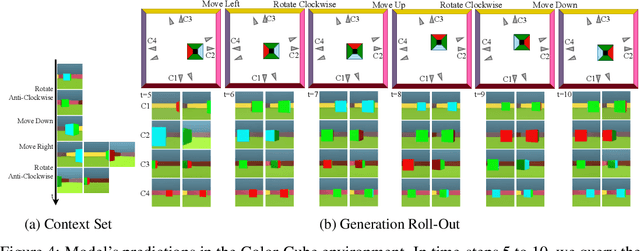
Neural processes combine the strengths of neural networks and Gaussian processes to achieve both flexible learning and fast prediction of stochastic processes. However, neural processes do not consider the temporal dependency structure of underlying processes and thus are limited in modeling a large class of problems with temporal structure. In this paper, we propose Sequential Neural Processes (SNP). By incorporating temporal state-transition model into neural processes, the proposed model extends the potential of neural processes to modeling dynamic stochastic processes. In applying SNP to dynamic 3D scene modeling, we also introduce the Temporal Generative Query Networks. To our knowledge, this is the first 4D model that can deal with temporal dynamics of 3D scenes. In experiments, we evaluate the proposed methods in dynamic (non-stationary) regression and 4D scene inference and rendering.